山区双车道公路弯道路段小型车左右行速度特性
2020-07-02吴尉健郭建钢陈金山刘丹丹
张 旺,吴尉健,郭建钢,陈金山,刘丹丹
(福建农林大学交通与土木工程学院,福建,福州 350002)
0 引言
我国山区面积辽阔,地形复杂多样,为了加强农村与城市的联系,促进 “乡村振兴”,修建了众多兼顾旅游性质的山区双车道公路[1-2]。由于受到地形等多种因素影响,此类公路多是顺势而为,设计标准往往取较低值,造成弯道众多,平纵组合不合理,使山区双车道公路存在一定安全隐患[3-5]。为此,众多学者开展了一系列相关研究。杨俊儒、何江李、Semeida 等人对于弯道路段的整体速度建立了安全速度模型[6-9];涂圣文,钱宇彬,王婉秋等人模拟双车道公路弯道路段行驶过程,研究考虑驾驶员特性的弯道整体安全模型[10-12];赵敏,徐静等人基于弯道线形的基础研究双车道弯道路段速度特性[13-15]。
从现有的研究来看,大部分研究涉及的均是弯道整体的速度特性,较少考虑到车辆在弯道行驶中左右行的速度特性差异。为此,本文使用无人机拍摄车辆的多个双车道弯道的小型车连续行驶视频,并借助图像处理技术获取小型车在弯道连续的速度变化下轨迹数据,从而获得左右行速度数据,以此探究其差异性,为山区双车道公路的安全限速提供一定参考。
1 方案设计
1.1 研究对象
根据福州宦溪镇至鼓岭景区道路竣工图资料,为控制变量,选取路段上的8 个弯道为研究路段,弯道前后均为较长直线,受连续弯道影响小。由设计资料可知,研究路段设计为三级山区公路,双向两车道,路基宽度7.5 m,设计速度30 km/h。道路为沥青路面,平整度较好;以小型汽车为主,交通密度较小,交通流基本处于自由流状态。弯道具体参数见表1。
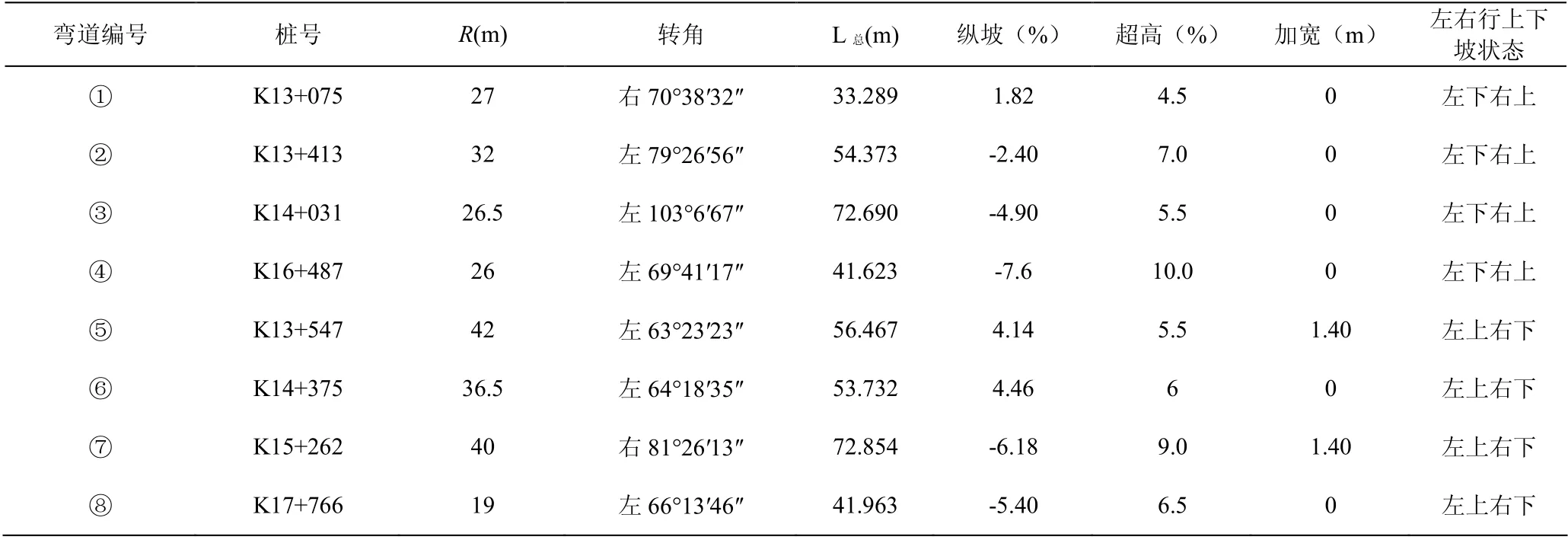
表1 道路弯道几何参数 Table1 Curve road geometric parameters
1.2 研究方法
1.2.1 视频资料获取
为了后续获取轨迹与速度数据更为准确,选择多云天气调查免受阴影影响,且无人机采用稳定的悬停技术于45~50 m 高度之间拍摄获取清晰的图像数据,无人机飞行高度及飞行过程不易被驾驶员察觉,不影响驾驶员行驶状态,保证所采集的数据为车辆在自然行驶状态下的数据。同时使用标定板、便携式路侧激光交通调查仪辅助轨迹数据矫正,ENW-60 奥地利电子水平尺辅助获取车辆车型、行驶方向和坡度等数据。根据统计学最小样本量要求,并结合本次试验条件,每个弯道所采集小型汽车的样本量为70 辆。
1.2.2 数据获取
1)弯道道路中线坐标化
考虑车辆在左右行时,所行驶的实际长度不相等,通过将弯道中线坐标化,能够更为量化直观地体现车辆在整个弯道的行驶速度变化。具体中线坐标化过程如下:通过设计资料及现场实际踏勘标定出弯道具体范围,将弯道入弯直缓点(ZH)至出弯缓直点(HZ)或入弯直圆点(ZY)、出弯圆直点(YZ)的过程以数据形式表示;为了体现小型车在整个弯道左右行的速度差异,以弯道1 为例进行坐标化,以右行入弯断面(ZY 点)作为原点,右行出弯断面(YZ 点)作为终点。车辆左右行运行方向及坐标量化情况见图1。
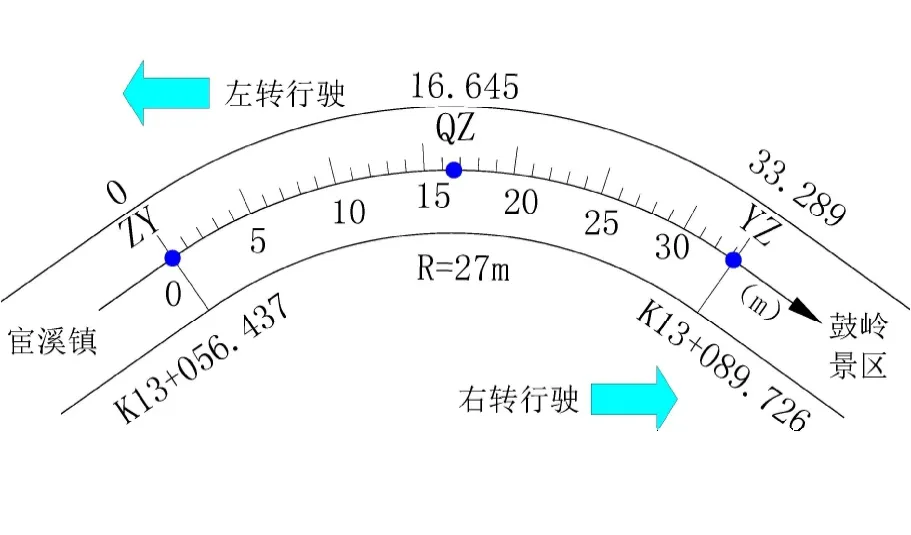
图1 弯道1 坐标化示意图 Fig.1 Center line coordinate diagram of 1st curve
2)基于图像识别技术的轨迹获取
为了降低背景对轨迹追踪的影响,将视频按时间顺序分成多帧图片,对视频中无车的背景(图2(a))进行学习后,采用图像处理技术,从每帧背景中提取出前景(图2(b))。将提出到的每帧前景图像(图2(b))重新合成视频,并导入到AE 视频处理软件追踪车辆左前轮轨迹,最终叠加背景获得图2(c)。

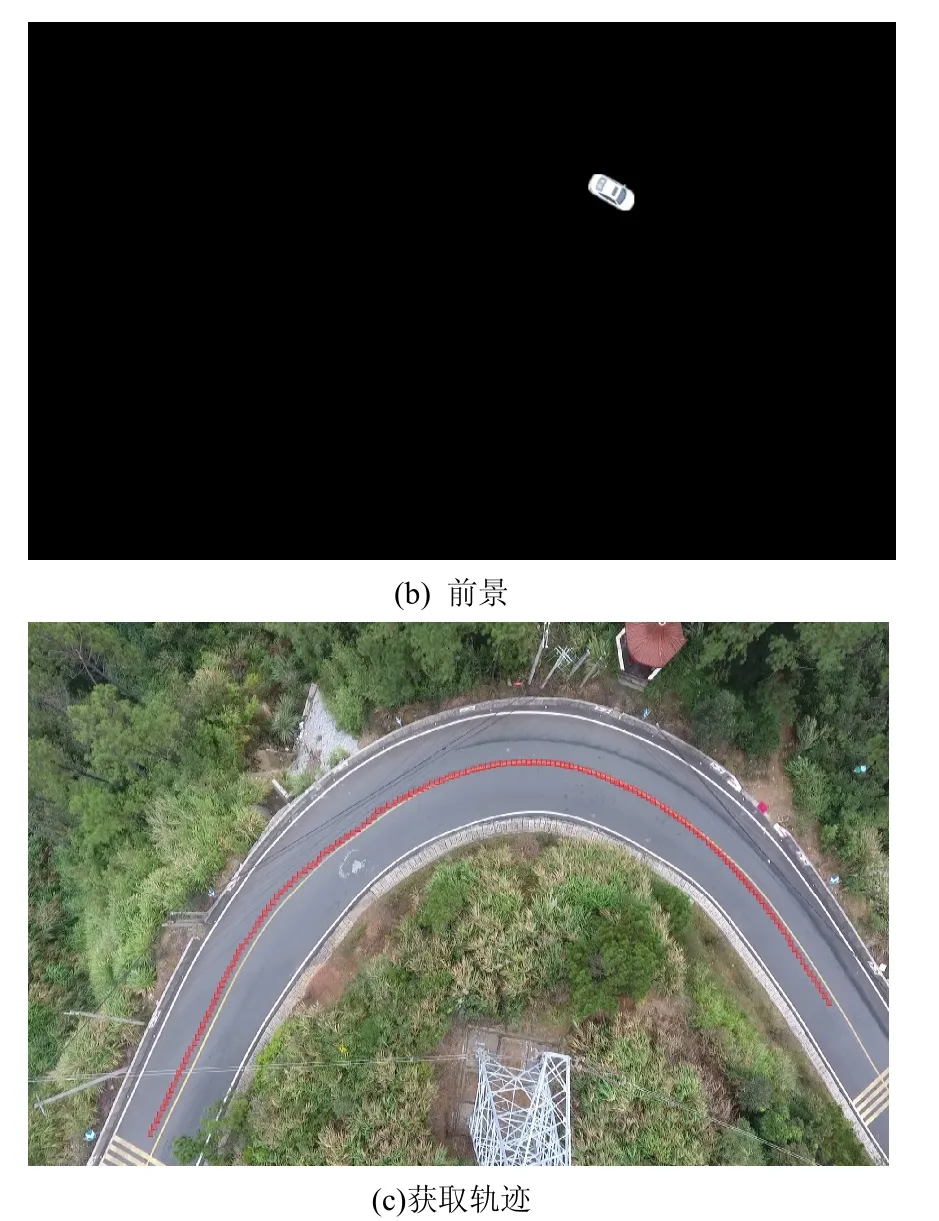
图2 弯道路段图像识别处理 Fig.2 Image recognition processing of curves
3)数据获取
将1)中获取到每个弯道的所有小型车的轨迹图像(图2(c))导入Autocad 中,通过标定板矫正获得图像真实尺寸。标定弯道起、终点后,以10帧为间隔,获得车辆位置,通过坐标化的弯道对轨迹进行读数从而获得车辆的速度,见图3。

图3 轨迹值读数 Fig.3 Trajectory value reading
2 结果与分析
2.1 左右行速度总体分析
将所获取的轨迹数据进行再次处理后得到速度数据,借助Matlab 软件将所获取的轨迹数据及速度数据绘制出三维数据散点图,其中浅黑色散点为右行速度值,深黑色散点为左行速度值,见图4。
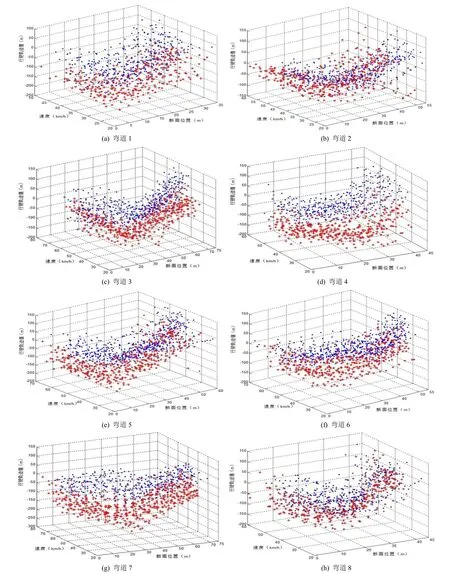
图4 轨迹数据及速度数据 Fig.4 Trajectory data and speed data
将采集的所有车辆速度数据绘制在同一张图上,使用GETDATA 软件,从断面0 m 开始,每5 m为一个断面,获取每辆车左右行的采集断面速度,从而获得代表整个弯道的左右行速度,并绘制出左右行总体变化曲线及右行与左行速度差值变化曲线,见图5。
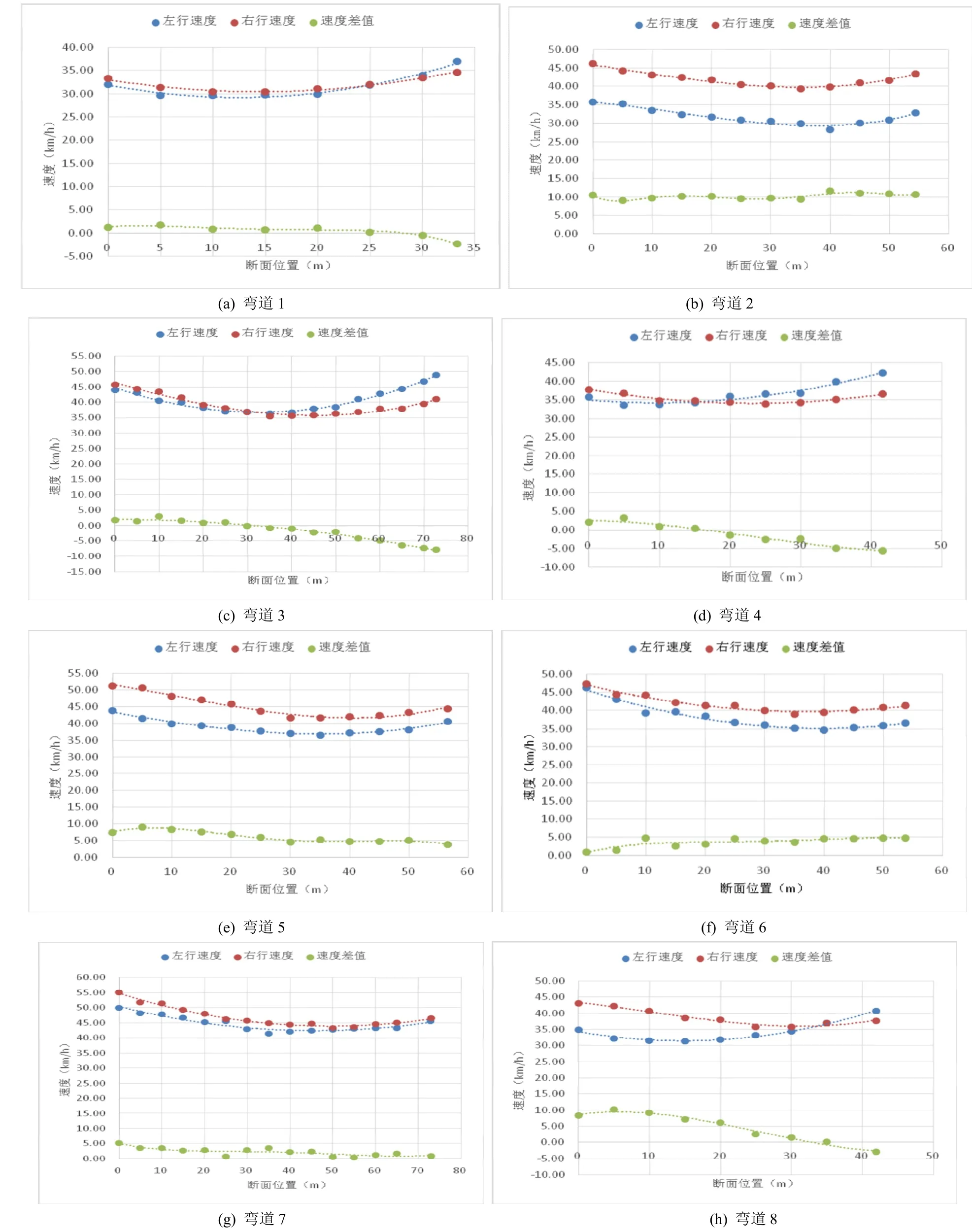
图5 弯道路段速度变化曲线图 Fig.5 The speed changes of curves
根据弯道路段左右行整体速度变化曲线图,弯道路段左右行速度差异说明见表2。

表2 弯道路段左右行速度差异 Table2 Speed difference between left and right of curves
由图6 及表2 可以发现:小型车左行速度与右行速度在所有弯道路段入弯-出弯过程中均呈现减速-加速状态,与弯道的整体速度变化呈现一致性;弯道2、5、6 和7 右行速度始终大于左行速度,左右行速度曲线不存在交叉,速度差值标准差较小,差值相对稳定,且四个弯道半径均大于30 m;弯道1、3、4 和8 右行速度先大于左行再小于左行,左右行速度变化曲线均存在交叉,速度差值标准差较大,差值存在明显波动,且四个弯道半径均小于30 m。
2.2 左右行速度差值关系拟合
由各弯道所有车辆左右行速度值获取整个弯道的左右行速度代表值,进而获得右行与左行速度差值,并与弯道半径及坡度拟合三维模型,见式(1)及图6;拟合关系式中R2处于0.5~0.8 之间,表明显著相关,拟合曲面和数据吻合较好;同时发现,在一定范围内,坡度越小,半径越大,速度差值越大。
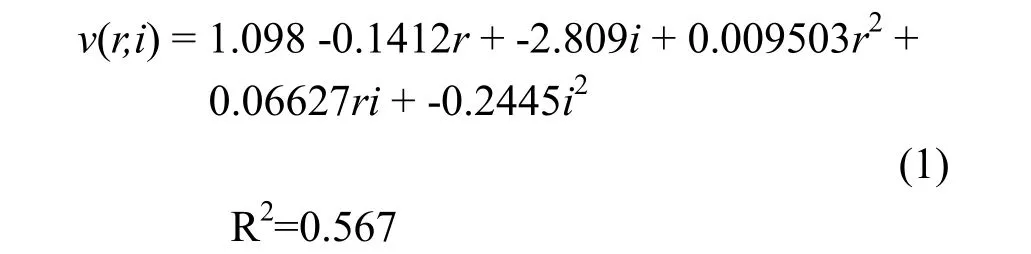
式中:v 为右行与左行速度差值,单位为km/h;
r 为半径,单位为m;
i 为纵坡,单位为%。
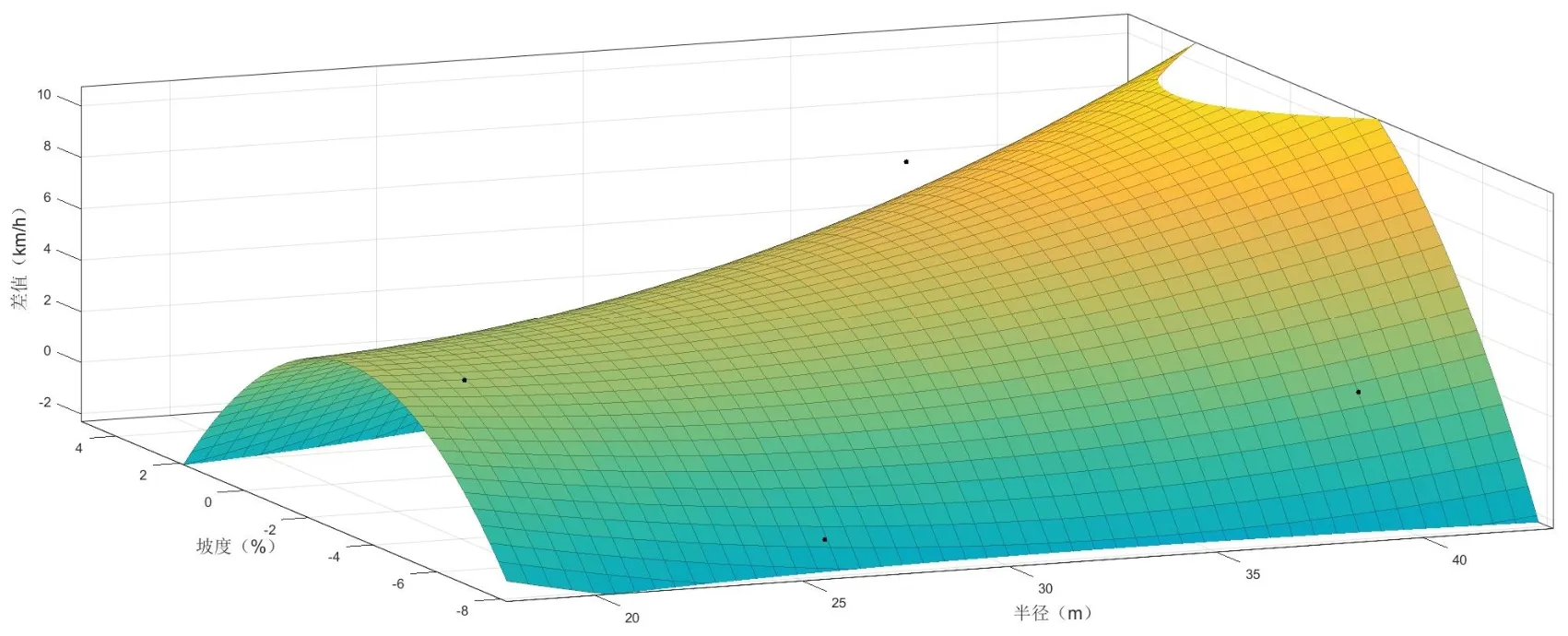
图6 速度差值-半径-坡度拟合模型 Fig.6 The relation fitting of Velocity difference - radius - longitudinal slope
3 结论
小型车在所有弯道左行或右行时均呈现入弯-出弯、减速-增速情况;当弯道半径大于30 m 时,右行速度始终大于左行速度,速度变化曲线不存在交叉,差值波动较小;当弯道半径小于30 m,左右行速度存在交叉,差值波动较大,左右行速度入弯-出弯速度大小与形态在一定程度上可以近似看成以曲中所在线为对称轴对称。在一定范围内,左右行速度差值与半径及坡度满足多项关系式,坡度越小,半径越大,速度差值越大。而山区双车道公路弯道现行限速主要以法律规定的30 km/h 作为限速值,根据上述结论,结合弯道实际情况,可针对差值较大的弯道左右行方向设置不同限速值,在兼顾通行效率的同时提高交通安全。本次研究的是山区三级公路,可进一步研究其他类型或其他等级公路的左右行速度差异特性。
