基于Can总线的蓄电池支架搬运车通信系统设计
2020-07-02布朋生
布朋生
(中国煤炭科工集团 太原研究院有限公司, 山西 太原 030006)
与柴油驱动的煤矿井下无轨辅助运输车辆存在的有害气体排放超标、噪声污染严重等问题相比,电驱型无轨辅助运输车辆不仅具有零排放、零噪声污染的特点,而且以环保、高效、节能等优势得到迅速发展[1]. 蓄电池支架搬运车作为能够较长距离行驶的矿用电动无轨运输车辆,在综采工作面发挥的作用越来越大。神东矿区引进的艾朗道公司(LONG-A IRDOX)的VT630、VT610以及比塞洛斯公司的VTC650型蓄电池支架搬运车在综采工作面液压支架的整体下井、倒面作业中发挥了重要的作用[2-3]. 煤炭科学研究总院在借鉴国内研究成果的基础上,设计并开发出WX35 J等一系列蓄电池支架搬运车,并应用于神东、陕煤等多个矿区。蓄电池支架搬运车以变频牵引技术、智能控制技术为核心,在整车节能、车辆轻量化等方面都优于柴油驱动支架搬运车。为保证蓄电池支架搬运车电气控制系统数据传输的稳定性、实时性,将Can/CanOpen通信技术引入蓄电池支架搬运车控制系统,为其变频调速、智能控制提供稳定的数据通道。Can/CanOpen通信技术较为成熟,在煤矿安全监控系统、矿用变频调速一体机等方面都有应用实例[4-6]. 以蓄电池支架搬运车为研究对象,设计并实现基于Can/CanOpen的通信系统,达到数据传输简单、稳定、实时的目的。
1 Can总线介绍
1.1 Can总线定义
现场总线(Field Bus)即工业数据总线,主要用于解决仪器仪表、控制器等工业现场智能化设备之间的数据通信问题,构建自动控制底层数据通信网络,为整体系统智能控制提供数据通信链路。常用的现场总线有Profibus、Profinet、EtherCAT、ControlNet以及Can/CanOpen等,具有实现简单、通信可靠、经济适用的特点。Can总线是一种串行数据通信协议,与ISO模型一致,有ISO11519-2(针对通信速率为125 kbps以下)和ISO11898(针对通信速率为125 kbps~1 Mbps)两个通信标准,由数据帧、遥控帧、错误帧、过载帧以及帧间隔共同完成数据通信。Can总线数据帧格式见图1,仲裁段表示该数据帧的优先级,其ID可为11位(标准帧,RTR=0)或29位(扩展帧,RTR=1).
1.2 Can总线特点
Can总线通信应用于煤矿井下数据传输,有如下特点:1) Can总线以通信数据块进行编码,使得Can局域网内的节点数量不受限制。2) Can总线通信速率可根据现场实际环境以及通信距离的长短灵活设置,可在50 kbps~1 Mbps选择。3) Can协议的循环冗余校验CRC以及短数据帧模式保证了数据通信的稳定性、实时性和灵活性。4) 多节点模式下可根据优先权进行总线访问。5) 报文按照NRZ(Non-Return-to-Zero)进行编码/解码。6) 灵活的总线访问冲突仲裁机制。

图1 Can通信数据帧格式图
2 总体结构
蓄电池支架搬运车通信设计框图见图2,以PLC控制器为控制核心,实现PLC控制器与变频器、数据采集器、驾驶室以及监控平台的Can通信。PLC控制器与变频器通信模式中,有左前、右前、左后、右后4个变频器,与电动机以“一拖一”模式进行工作。支持Can通信的数据采集器将采集的开关量、模拟量以Can通信模式发送给PLC控制器。蓄电池支架搬运车驾驶室/监控平台的控制指令以及显示的数据以Can通信进行数据传送。PLC控制器将获取的所有Can总线数据经以太网模块传送至煤矿井下工业环网[7],方便地面集中控制中心的监控和数据分析。
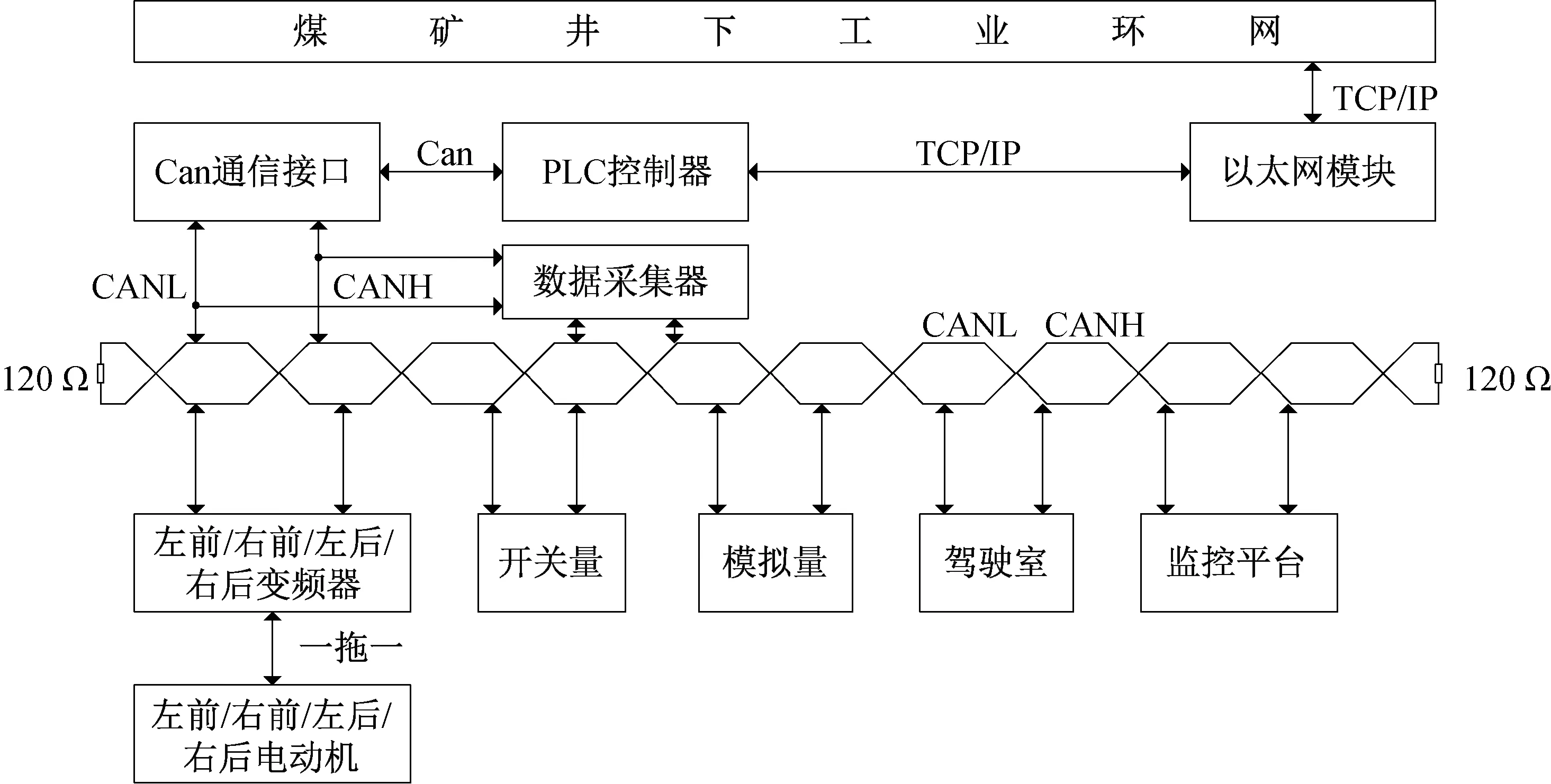
图2 蓄电池支架搬运车通信设计框图
3 方案设计
3.1 Can通信参数设计
设计并实现的蓄电池支架搬运车通信系统Can通信参数配置信息见表1,PLC控制器与4个变频器之间以Can2.0 A协议格式进行数据传输,采用标准帧格式。 蓄电池支架搬运车电气控系统中开关量、模拟量较多,采用ADFTO-4824通用信号采集器,将采集到的开关触点、模拟量以Can或RS485模式输出,开关量可为无源/有源DC+9V-24V,模拟量可为电流型4~20 mA,或者电压 DC0-5V/DC0-10V,满足蓄电池支架搬运车电气系统需求。PLC控制器与驾驶室、监控平台之间以Can2.0B协议格式进行通信,采用扩展帧格式,其COBID分别为0×8 122以及0×8 132.
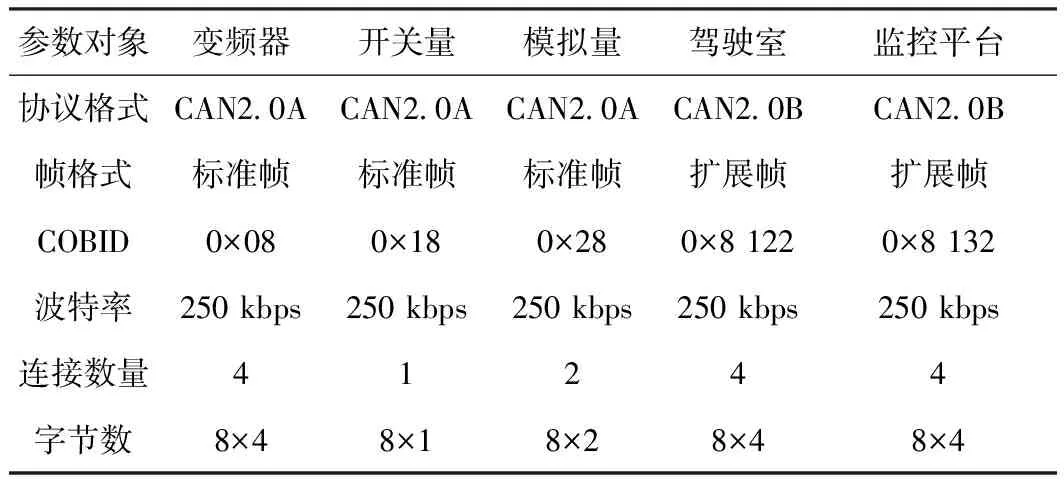
表1 电驱型支架搬运车通信系统参数设置表
3.2 Can通信软件设计
Can通信软件设计包括Can通信连接的建立过程、Can通信数据发送过程以及Can通信数据接收流程,见图3. Can通信建立过程需要对Can通信参数如COBID、波特率等进行初始化配置,在对发送连接、接收连接建立时,根据输出传输的实际需要,建立合适通信连接N,定义每一条连接可传送8字节,则该Can通信连接一共可传输的字节数为8×N.
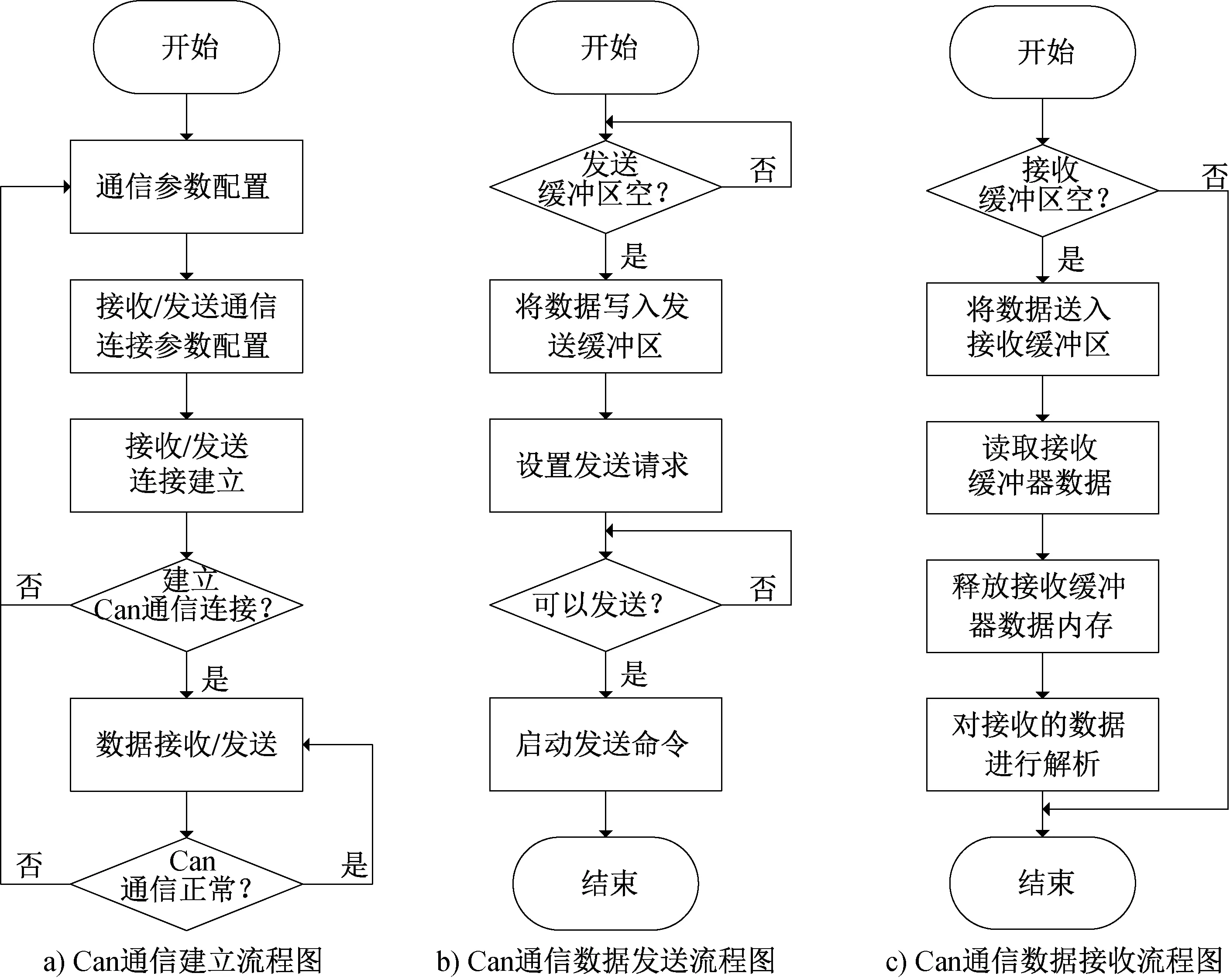
图3 Can通信建立数据发送流程及接收流程图
设计Can通信数据收发流程时,分别定义发送缓冲区和接收缓冲区。数据发送时,PLC控制器首先将数据写入发送缓冲区,设置发送请求命令后,才可以启动发送命令将发送缓冲区中的数据发送。发送成功后,将发送缓冲区清空。数据接收时,只有接收数据缓冲区不为空才启动接收流程,首先将要接收的数据送入接收缓冲区,PLC控制器读取接收缓冲区数据并进行解析,同时将接收数据缓冲区清零。接收/发送数据缓冲区是一个FIFO队列,需遵循先入先出的原则。
4 实 现
采用CAN总线实现的蓄电池支架搬运车实物见图4,电气控制部分由左/右电气控制箱两部分组成,每个电气控制箱中装有两个变频器,分别控制左前/右前/左后/右后4个电动机。驾驶室内安装有脚踏板以及手柄,其信号都以CAN总线方式传送至电气控制箱控制支架搬运车的油泵启动/停止、解制动、前进、后退等。支架搬运车前部用于对液压支架进行转运,后部为蓄电池,为支架搬运车提供动力。

图4 基于Can总线的蓄电池支架搬运车
5 现场测试
将设计并实现的蓄电池支架搬运车通信系统嵌入至电气控制系统中,完成硬件设备的连线和软件调试工作,对PLC控制器与4个变频器、开关量、模拟量、驾驶室以及监控平台Can通信功能进行现场测试。Can通信数据线采用双绞屏蔽专用线,增加Can通信隔离模块,Can通信两端增加120 Ω终端电阻。数据发送方式定义为:数据位无变化时,周期发送,发送周期为500 ms;数据位有变化时,立即发送数据。利用CAN分析仪,对PLC控制器与变频器驾驶室以及监控平台CAN通信数据进行捕获和分析。经现场测试,系统响应最大延时为200 ms,传输误码率为0,保证蓄电池支架搬运车PLC控制器与各设备间数据通信的稳定性与实时性,能够完成对支架搬运车的前进/后退/停止等多种控制方式,间接证明了设计并实现的CAN通信系统的有效性和正确性。
6 结 论
分析蓄电池支架搬运车电气控制系统中各设备以及传输数据需求,以Can总线方案建立数据通信系统,简化各设备之间的复杂接线,同时保证了PLC控制器与各设备之间数据传送的稳定性和实时性,满足蓄电池支架搬运车电气控制系统需求。整个通信系统线路连接简单,便于安装、调试和维护。另外,将蓄电池支架搬运车所有数据以TCP/IP模式发送至工业环网以及集中控制中心,实现整个矿区的数据共享。
