面向防振锤修复的架空检修机械臂碰撞检测方法
2020-07-01杨发蔡晓斌刘荣海郑欣郭新良杨迎春
杨发 蔡晓斌 刘荣海 郑欣 郭新良 杨迎春

摘 要:针对架空输电线路环境下的防振锤修复作业,本文在考虑架空检修机械臂所有关节与障碍物空间位置关系的基础上,提出了采用简单几何体对空间障碍物模型近似的策略。通过对柱状障碍物、线状障碍物以及机械臂关节连杆的模型建立和相应碰撞检测方法的验证,结果表明本文提出的碰撞检测方法不仅有利于最大化机械臂的有效作业空间,而且能够保证碰撞检测的可靠性。
关键词:防振锤修复;机械臂碰撞检测;障碍物模型
引言
架空输电线路上的防振锤由于螺栓松动移位以及锤头锈蚀断裂等情况时有发生,若不及时进行检修维护,将不能起到原有的防振效果,因此为了及时发现并消除防振锤存在的这些隐患,需要在常规的架空线路巡线机器人本体上设计出具有防振锤修复功能的检修机械臂。由于架空输电线路机器人作业过程中,需要保证足够的实时性和安全性,因此在对机械臂的避障路径规划过程中,碰撞检测方法就显得尤为重要[1]。
针对机械臂与空间障碍物的碰撞检测,文献[2]将机械臂工作空间分割成离散单元集合并采用方向包围盒作为机械臂拟合模型,但并不能适用于任务多变的工作环境。文献[3]通过采用相互叠加的球包络一个实体,由此连杆直线段和障碍实体之间的干涉判断视为直线段和一系列球心点之间的距离判定,但针对一些比较复杂的障碍会过多地牺牲机械臂的实际工作空间。
综上可知,当前国内外针对机械臂关节的碰撞检测主要特点为:能够实现快速的在线碰撞检测但障碍物近似模型过于简化,牺牲了机械臂较多的作业空间。因此,本文提出一种考虑全关节的机械臂碰撞检测方法,在最大化机械臂作业空间利用率的同时,保证在线规划非碰撞路径的可靠性。
1 模型简化
1.1障碍物近似模型
如图1所示,架空检修机械臂对防振锤进行修复过程中,需要进行碰撞检测的空间物体主要为架空导线以及防振锤,因此可以将防振锤和导线分别简化为如图2所示的柱状物和线状物。
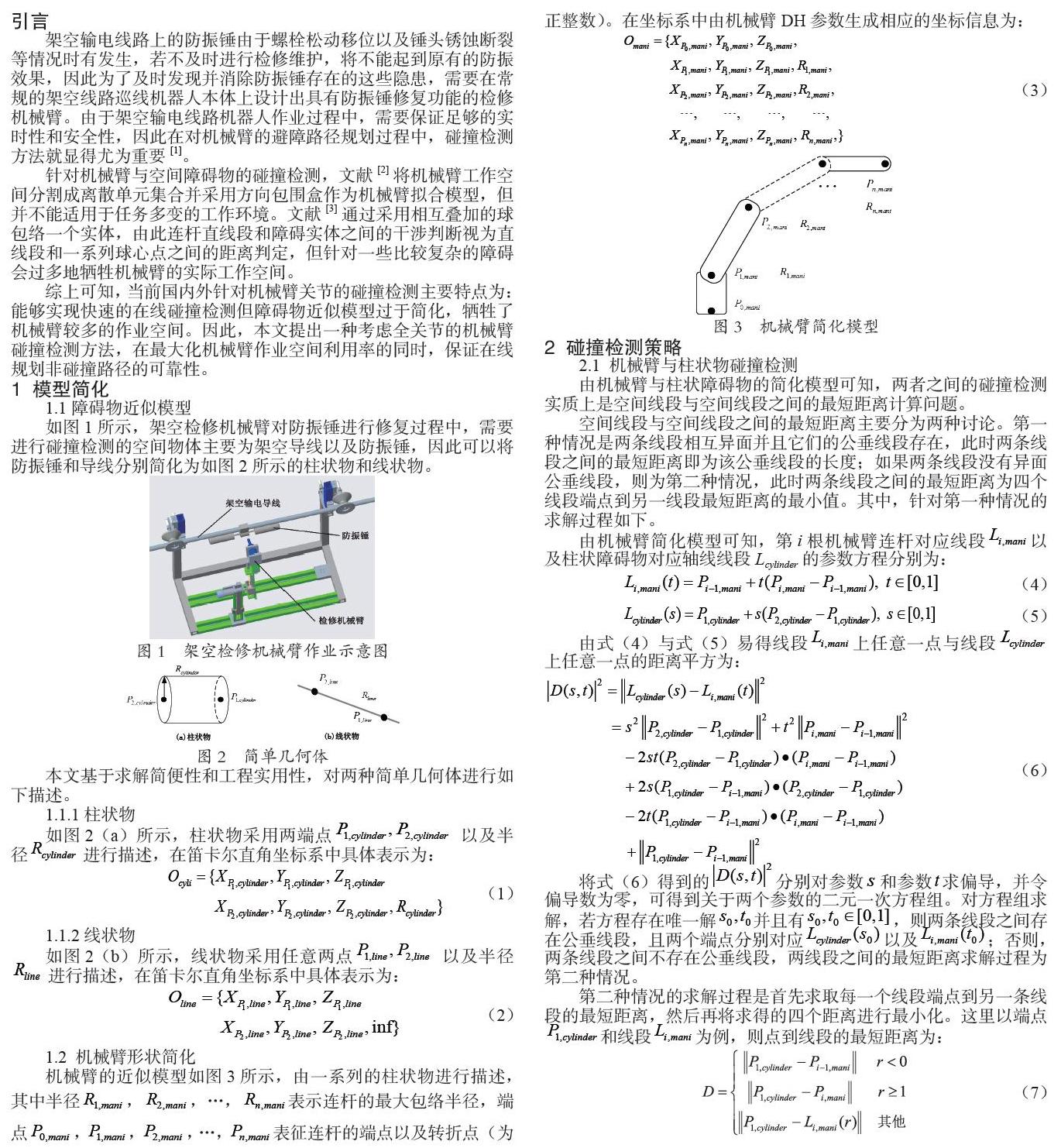
1.2 机械臂形状简化
2 碰撞检测策略
2.1 机械臂与柱状物碰撞检测
由机械臂与柱状障碍物的简化模型可知,两者之间的碰撞检测实质上是空间线段与空间线段之间的最短距离计算问题。
空间线段与空间线段之间的最短距离主要分为两种讨论。第一种情况是两条线段相互异面并且它们的公垂线段存在,此时两条线段之间的最短距离即为该公垂线段的长度;如果两条线段没有异面公垂线段,则为第二种情况,此时两条线段之间的最短距离为四个线段端点到另一线段最短距离的最小值。其中,针对第一种情况的求解过程如下。
将式(6)得到的分别对参数和参数求偏导,并令偏导数为零,可得到关于两个参数的二元一次方程组。对方程组求解,若方程存在唯一解并且有,则两条线段之间存在公垂线段,且两个端点分别对应以及;否则,两条线段之间不存在公垂线段,两线段之间的最短距离求解过程为第二种情况。
第二种情况的求解过程是首先求取每一个线段端点到另一条线段的最短距离,然后再将求得的四个距离进行最小化。这里以端点和线段为例,则点到线段的最短距离为:
通过以上两种求解过程获取两线段之间的最短距离后,将该最短距离与进行比較,即可判断出机械臂每一连杆与柱状障碍物的空间位置关系,进而可判断机械臂是否与障碍物发生碰撞。
2.2 机械臂与线状物碰撞检测
从机械臂与线状障碍物的简化模型中可知,两者的碰撞检测是空间线段与空间直线的距离计算问题,虽然这类似于空间线段与空间线段的距离计算,但由于直线并不受限于参数的取值范围,因此空间线段与空间直线的距离表达式中仅包含一个参数,也就意味着式(6)退化成了式(8)中关于参数的一元表达式,这对最小距离的求解是非常有利的。因为,此时若向量为0,则表示线段与直线平行,在线段上任意一点到直线的距离即为最小距离;若向量非0,则式(8)为一元二次表达式,由一元二次函数性质即可轻易求出时的最小值。
按照以上过程求出线段与直线line的最小距离后,将该最小距离与进行比较,即可判断出机械臂第i连杆与线状障碍物的空间位置关系,继而完成机械臂与障碍物的碰撞检测。
3 仿真结果分析
为验证本文提出的机械臂碰撞检测方法的有效性及可行性,对机械臂、柱状障碍物和线状障碍物分别进行了建模,并利用本文提出的碰撞检测方法对机械臂进行了路径规划,进而验证不同障碍物碰撞检测算法的可靠性。
通过对图4与图5中机械臂末端扫过的空间轨迹分析,可以明显看到:在含有架空输电导线以及防振锤的环境下,整个机械臂运动过程中,无论是机械臂的末端还是机械臂其他关节都是与空间障碍物不发生碰撞的。因此,本文提出的碰撞检测方法是可靠的,能够保证架空检修机械臂在防振锤修复作业过程中的非碰撞路径规划。
4 结束语
为保证架空检修机械臂在防振锤修复作业过程中具有更多的有效作业空间以及实现相应的碰撞检测,本文采用了空间线状物和空间柱状物分别对架空输电导线和防振锤近似的策略,并基于解析求解的思想给出了针对不同障碍物的碰撞检测算法,仿真结果表明本文提出的架空检修机械臂碰撞检测方法不仅提供了更多的机械臂有效作业空间,而且能够保证防振锤修复作业过程中非碰撞路径规划的可靠性。
参考文献:
[1]Mao H , Xiao J . Real-Time Conflict Resolution of Task-Constrained Manipulator Motion in Unforeseen Dynamic Environments[J]. IEEE Transactions on Robotics, 2019, PP(99):1-8.
[2]阳涵疆, 李立君, 高自成. 基于关节构形空间的混联采摘机械臂避障路径规划[J]. 农业工程学报, 2017, 33(04):55-62.
[3]祁若龙,周维佳,王铁军.一种基于遗传算法的空间机械臂避障轨迹规划方法[J].机器人,2014,36(03):263-270.
(1.华北电力大学机械工程系,河北 保定071003;2.云南电网有限责任公司电力科学研究院,云南 昆明650217;3.华北电力大学云南电网公司研究生工作站,云南 昆明650217)
