升降横移式立体车库车辆智能监控调度系统设计
2020-06-30徐敏
徐敏
(江苏财经职业技术学院机械电子与信息工程学院,江苏 淮安223003)
随着我国汽车保有量的不断增加,城市停车难的问题日益显著。自动化立体车库作为未来车库的主流发展趋势,具有占地面积小、存取容量大等优点。但是,其也存在操控性能差,程序控制误差较大等不足。文中以升降横移式立体车库的结构与功能需求为基础,对车库总体控制架构、车辆存取策略、载车板优化调度算法进行了研究,为改善立体车库的操控性、适应性与实用性提供了有效的解决方案。
1 总体方案设计
车库底层与顶层载车板分别仅能够作横移、升降运动,中间层则皆可。常用的2~3 层升降横移式立体车库通过链条传动方式牵引载车板沿车库主体升降,通过横移电机的正反转运行驱动载车板沿导轨横移。
系统以PLC 为控制核心,在正常运行状态下,由上位计算机直接向PLC 发送控制指令,调动载车板移动至预定车位,同时进入监控状态;操作人员也可以在面板上输入目标车位号,由PLC 执行载车板移动程序,完成车辆存取操作。
在车辆存取过程中,以射频IC 卡实现车辆身份信息识别、停车计时与费用收缴等功能。
2 控制系统设计
系统由配置有Profibus-DP 卡CP5611 的上位计算机和带EM277 智能通信扩展模块的西门子S7-200 PLC 为核心的两级控制系统组成。现场控制级设备主要包括一个S7-200 型PLC与三个分布式I/O ET200 模块,主从之间利用Profibus 协议建立一种一主多从通信网络。其它现场检测及驱动设备均与邻近ET200 的Profibus 接口相连接。主站通过轮询方式实现与从站的数据交换。
2.1 信号检测系统
车库单元进口处的光电开关,用来检测车辆长度、高度,以防止超限造成车辆损坏;靠近进(出)口处的光电开关,用来判断载车板是否到位,以及对出、入库车辆进行加、减计数;载车板对角线、底层两侧上的光电开关,用于判断空载、停车到位状态。当出现人员误入等意外,光线遮挡光电开关,发送一个电平突变信号至PLC,所有电机停止运行并报警。四只称重传感器实现汽车重量检测。信息经PLC 处理计算后,由上位机进行后续分析处理。
2.2 传送控制系统
传送控制系统的目标对象为车库驱动设备。上层载车板的升降与下层的横移运动互锁,且每次只执行一个单元的升降运动。行程开关用于载车板在定位控制时的电机制动或者在故障时紧急断电触发防坠挂钩:任一载车板触碰上、下行程装置或按下急停开关,则断开所有电机电源;顶、底层载车板未在原位时,则中间层载车板无法运行;中间层未在原位时,则顶、底层载车板无法运行;防坠挂钩闭合时,则无下行运动。
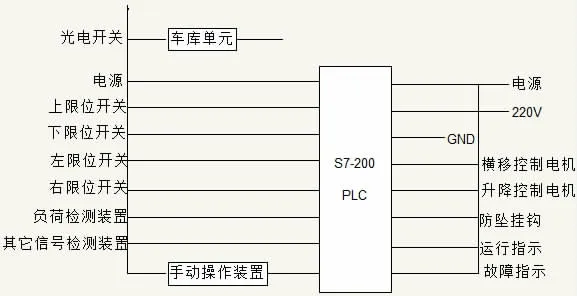
图1 传送控制系统控制原理图
以3x4 型立体车库的实际需求分析,控制系统输入、输出信号分别有54、36 个。S7-200-CPU226 本机带24 输入/16 输出,选用输入输出模块EM223CN 扩展(32 输入/输出)。
2.3 上位计算机监测
上位机采用组态王软件接收与处理PLC 上传的现场数据,并驱动图形化界面显示各单元状态信息。S7-200 型PLC 利用EM277 通信模块建立Profibus-DP 通信网络,组态王经OPC 通道连接OPC 服务器以实现数据交换。
3 控制算法与最优选择
3.1 控制方法
单元停车位存在多种状态组合,若将调度程序全部编制,会占用较大量的存储空间。因此,在设计中利用S7-200 的功能指令SBR 编制运动程序模块。将所有载车板行列信息及各层空位列信息均存储于变量寄存器Var 中。假设3x4 型10 车位立体车库在初始状态下,底层与中间层空位均处于车库最右侧,分别用P4、P8表示其所在列,赋值P4=P8=4。P1~P3、P5~P7为从左至右第一、二层载车板所处列位置,依次赋值为P1=P5=1,P2=P6=2,P3=P7=3。同理,用P9~P11、P12~P15表示车库中间层、顶层从左至右载车板升降状态,以0 与1 定义原位与底层。顶层载车板、底层载车板勿需运动,所以不予编号与赋值。在执行过程中,上述状态变量值不断刷新,并调度相关载车板运行以建立下行移动通道。
3.2 最优选择算法
载车板需根据一定的规则在最短时间范围内移动到车库底层。人工智能算法在搜索最优解时具有较强的鲁棒性,可进行最优车位选择。
假设3x4 型二维矩阵立体车库10 个车位均与像素点相对应,以数组X[X1][X2]、Y[Y1][Y2]分别表示各车位单元、载车板所处位置,其中X1、Y1用于表征车库层数,取值为1、2 或3;X2、Y2用于表征车库列值,取值为1、2、3 或4。
在调度管理算法中,第一步搜索底层空载车板,如果已有车辆数目小于本层所允许停放车辆的最大值3,则能够直接停放。否则采用基于领域的搜索策略择优获取最佳车位:将车库的当前状态作为初始节点,预设其遍历最深深度值为5(V1~V5)。V1、V2、V3表示遍历底层空闲车位单元的4 邻域、8 邻域与其正上方顶层的空闲车位单元、中间层空闲车位单元的4 邻域,V4、V5分别表示遍历中间层、顶层余下的车位单元。节点代价公式:I(x)=J(x)+K(x),其中J(x)、K(x)与I(x)分别表征由初始节点到目标节点的横移、升降与总代价。依序遍历V1~V5以得到空闲单元,如若在某一深度下搜索到的该类单元超过一个时,进行总代价比较,最小即为最优。
4 结论
基于Profibus 总线技术的一主多从立体车库二级调度管理技术提出了简单易行的基于邻域的有界择优搜索策略,得到了趋近于最佳的车位选择结果,对车库的建设、改造与管理优化具有较好的借鉴价值,具有较为广阔的市场前景。
