基于拓扑优化的自行车一体轮设计
2020-06-29苏阳
摘 要:采用基于SIMP变密度法的拓扑优化方法,对自行车轮组进行了轻量化设计。综合考虑了自行车运行时的复杂受力情况,分别建立了轮组的静态和动态有限元模型,并对优化后的结构进行了校核。研究结果表明,优化后一体轮的质量减轻了17.6%,无论静载还是碰撞工况都能满足强度要求,验证了新结构的可行性。
关键词:拓扑优化;轻量化;一体轮
0 引言
自行车是当前日常出行和旅游休闲的一种必要装备。自行车的主要重量集中在车架和车轮上,在运动过程中车轮随花鼓驱动而转动,车轮重量越小,转动惯量越小,越容易被驱动,过重的车轮则会严重耗费骑行者的体力。传统车轮包括了金属制的轮辋、轮辐、轮毂等一系列组件,也可称之为“轮组”,各组件间用螺纹连接。针对车轮进行轻量化设计,采用高强度工程塑料制成一体轮,可以在保证结构安全的基础上减轻重量,并简化装配工艺,提高车轮的稳定性,在提升自行车骑行感受的同时降低制造成本。
关于轻量化的研究在结构工程领域已广泛开展,采用诸如拓扑优化、起筋优化、尺寸优化等一系列优化方法,可快速获取符合期望的设计方案,缩短设计周期。其中,拓扑优化的方法,是在给定的材料空间内,得到满足约束条件又使目标函数最优的材料布局方式[1],其更多地应用于初期概念设计阶段,之后再根据材料布局,结合具体要求进行详细设计[2]。
本研究采用优化软件TOSCA对车轮进行拓扑优化分析,在保证轮组静强度及抗冲击性能的前提下降低轮组的重量,实现一体轮的轻量化设计。
1 拓扑优化方法及数学模型
连续体拓扑优化方法繁多,根据原理的不同,常见拓扑优化方法包括均匀化法、变密度法、渐进结构优化方法(ESO)、水平集法等[3-4]。其中,变密度法将单元密度和材料属性关联起来,设计变量简化为相对密度,计算规模大为降低。其概念简单,算法易于实现,优化效率高[5],是当前工程应用中较为成熟的拓扑优化方法,被广泛用于OptiStruct、TOSCA等商业软件中。
目前,变密度法中最常见的材料插值方法是带惩罚因子的固体各向同性微结构模型(SIMP)和材料属性的合理近似模型(RAMP),两者分别采用幂形式的罚值和有理函数的方式来建立插值模型[6-8],如公式(1)(2)所示。
SIMP模型:
E=E0 ρp (1)
RAMP模型:
E=E0 · (2)
式中,E為待定材料的弹性模量;E0为原材料的弹性模量;ρ为相对密度;p为惩罚因子。
商用优化软件TOSCA集成了多种优化算法,本文根据一体轮轻量化设计的特点,采用基于SIMP模型的控制算法,该算法不基于敏度信息,可处理几何非线性、接触等非线性问题,迭代速度更快。
2 一体轮的拓扑优化
2.1 车轮的几何建模
一体轮的设计极大简化了轮组的几何建模过程,无需考虑各组件间的连接。考虑到工作站的计算效率,设定网格单元长度1 mm,单元总数537 405,全部采用六面体实体单元,如图1所示。
为兼顾强度及减重的要求,材料选用玻纤增强塑料PA66尼龙,其中玻纤含量50%。区别于一般的金属材料,工程塑料具有明显的非线性弹塑性特征,力学性能受温度、湿度影响较大;且静载和动态载荷下,随着材料应变率的增长,力学性能也会呈现出不同。在湿态常温静载下,此材料弹性模量为5 000 MPa,泊松比为0.35,应力—应变曲线如图2所示,失效应力为128 MPa。
2.2 工况条件
轮组在实际运行过程中除了承受静载荷,还有可能受飞石等物体碰撞而损坏,因此分析时还需考虑碰撞冲击等动态行为。
各工况下边界条件都施加在轮毂中心,模拟实际花鼓被固定在中间的情况。
2.2.1 静载荷工况
轮组受力较为复杂,承受的力主要有径向力、切向力以及一定的弯矩。结合实际情况将工况分为以下四种情况:同向弯曲、对侧弯曲、径向刚性以及制动工况。
(1)同侧弯曲:分别取两对角点,对轮缘两侧施加同侧力各500 N,如图3(a)所示。
(2)对侧弯曲:分别取两对角点,对轮缘两侧施加对侧力各500 N,如图3(b)所示。
(3)径向刚性:在轮缘外端处向轴心施加径向力2 500 N,模拟车轮承载情况。
(4)制动工况:在轮缘处施加750 N切向力,模拟紧急刹车时的受力。
各工况均取两种点位(轮辐和非轮辐处)分别模拟轮辐处及非轮辐处的受力情况。
2.2.2 动态碰撞工况
飞石碰撞发生的时间非常短暂,属于瞬态动力学分析,质量产生的作用不能忽略。本研究基于LS-DYNA建立了两种球状石块模型,分别模拟低速和高速飞石冲击下的轮辐受损情况。
碰撞工况主要考察部位在轮辐,而优化模型中轮辐位置尚未确定,因此在拓扑分析中将不考虑动态冲击过程,最终在结构的性能验证阶段校核。
2.3 优化方案
基于SIMP数学模型在TOSCA中建立拓扑优化模型。模型将整个轮圈内部区域定义为设计空间;轮毂和轮辋需要和其他部件连接,被冻结以便载荷和边界条件的施加。本次优化分析充分考虑了所有静载工况条件,以柔度最小(刚度最大)为目标,同时约束体积百分比30%,建立的数学模型如公式(3)所示[9]。
设计变量Find:X={x1,x2,…,xn}T
目标函数Min:
C(xi)
约束条件s.t.:
Vol(xi)≤0.3
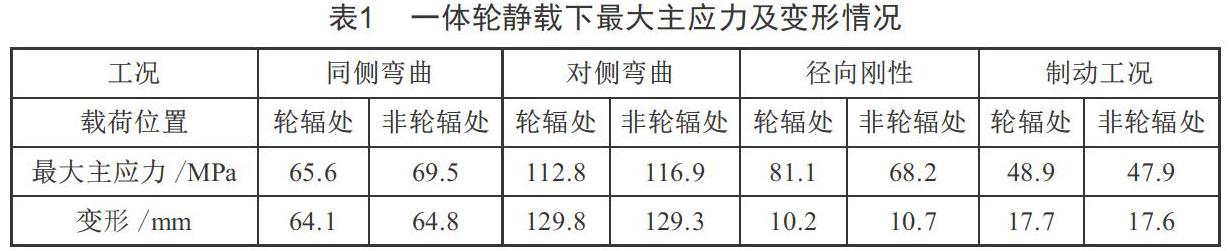
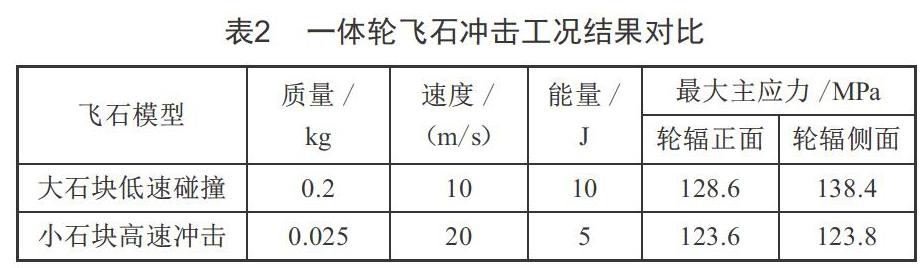
0 式中,xi为第i个单元的相对密度;n为单元数;C为第i个单元的应变能;Vol为第i个单元的体积。 考虑车轮的美观性,设定优化区域周向对称(Rotational symmetry constraint)10次的约束;此外,为保证在轮辐及非轮辐处均达到承载要求,在轮缘周向相距18°布置了两个受力点位,分别施加4种静载工况。 2.4 优化结果 经过15次的迭代计算,优化后的单元密度结果如图4所示。深灰色区域表示需要保留材料的区域,TOSCA控制算法在迭代计算时已做处理,只保留了保证最大刚度需要的材料。概念模型经后续光滑处理并重新设计,结合塑料注射成型工艺的限制,最终设计结构如图5所示。 3 一体轮性能验证 3.1 静载荷校核 针对新的结构设计重新建立有限元模型,根据前述工况施加相同的静载条件。其中,对侧弯曲工况的加载方式和最大主应力结果分别如图6和图7所示。 各个静载荷工况下,车轮的最大主应力结果如表1所示。 根据对比结果可知,分别对轮辐处和非轮辐处加载时,車轮的最大主应力分布和变形值相当接近。对侧弯曲工况下,在非轮辐处加载时最大主应力达到最大,为116.9 MPa。各工况的最大主应力均小于静载失效应力128 MPa,车轮在静载荷下处于安全状态。 3.2 抗冲击性能校核 针对建立的两种球状飞石模型,分别验证了大石块低速碰撞和小石块高速冲击不同工况下,轮辐正面及侧面的抗冲击性能,其最大主应力结果如表2所示。 塑料在高速冲击模式下的材料性能和静载时相差很大,应变率达到100 s-1后,材料的失效应力将提高到175 MPa以上。由表2可知,轮辐正面和侧面在两种碰撞工况下最大主应力都低于175 MPa,轮辐不会失效。轮辐在低速碰撞下的受力状态如图8所示。 4 结论 本研究采用拓扑优化软件TOSCA,结合求解器ABAQUS及LS-DYNA,对自行车轮组建立了复杂工况下的有限元模型并进行了分析: (1)基于SIMP数学模型,根据设计要求建立了体积约束下柔度最小的优化模型,获得了满足制造要求的优化结果。 (2)优化后的结构在静载荷和飞石碰撞工况下,均能满足材料的强度要求,保证结构的安全。 (3)采用一体轮设计后,轮组质量降低为1.41 kg,相比较原始钢圈结构减轻了17.6%,实现了轻量化的目的。 研究结果表明了在自行车轮以塑代钢的轻量化设计过程中拓扑优化方法的有效性,也为解决同类型的工程问题提供了一定的参考。 [参考文献] [1] 张宁,赵兴玉,张大卫,等.基于TOSCA软件的精密卧式加工中心滑板的拓扑优化方法[J].机械设计,2017,34(1):27-31. [2] 王曦,赵重年,李昊天,等.几种主要拓扑优化建模方法的分析对比及展望[J].装备制造技术,2019(2):191-193. [3] 夏天翔,姚卫星.连续体结构拓扑优化方法评述[J].航空工程进展,2011,2(1):1-11. [4] 张光亚,龚云云,程一明,等.某微车座椅骨架的轻量化拓扑构型设计[J].汽车工程学报,2018,8(6):423-430. [5] 李翔.基于变密度法的结构动响应拓扑优化研究[D].上海:复旦大学,2011. [6] 陈垂福,蓝双,杨晓翔,等.基于SIMP理论的衡器载荷测量仪悬臂梁拓扑优化研究[J].机电工程,2016,33(4):383-387. [7] STOLPE M,SVANBERG K.An Alternative Interpolation Scheme for Minimum Comp- liance Topology Optimization[J].Struc- tural and Multidiscipline Optimization,2001,22(2):116-124. [8] 李严.基于SIMP的预应力结构的拓扑优化[D].大连:大连交通大学,2016. [9] 郭璐,杨云,王崴,等.基于SIMP拓扑优化的驾驶舱轻量化设计[J].计算机工程与设计,2015,36(9):2490-2495. 收稿日期:2020-04-07 作者简介:苏阳(1987—),男,江苏泰州人,硕士,高级工程师,研究方向:基于工程塑料的结构仿真分析。
