偏置曲柄连杆摇摆机构受力分析
2020-06-29徐智马长帅
徐智 马长帅


摘 要:對偏置曲柄连杆摇摆机构进行运动及受力分析,建立方程,进一步说明其工作原理,计算出机构运转需要的外力,为驱动机构的选型提供理论基础,同时为机构设计中材料的选用等提供理论依据。
关键词:偏置曲柄连杆摇摆机构;运动分析;受力分析
0 引言
在食品包装机械设计中,为了将盒子夹持住,需要使用到偏置曲柄连杆摇摆机构,这种机构在伺服电机的驱动下往往是成对使用,实现对包装盒的夹持。这种偏置结构由于摆动的角度比较小,可以实现短时的快速运动,完成一次对盒子的夹持动作,提高了工作效率。这种结构比较简单、易于制造,所以制造成本比较低廉。目前,随着数控加工机床的广泛使用,偏置曲柄连杆摇摆机构在制造和安装方面已不存在技术问题。
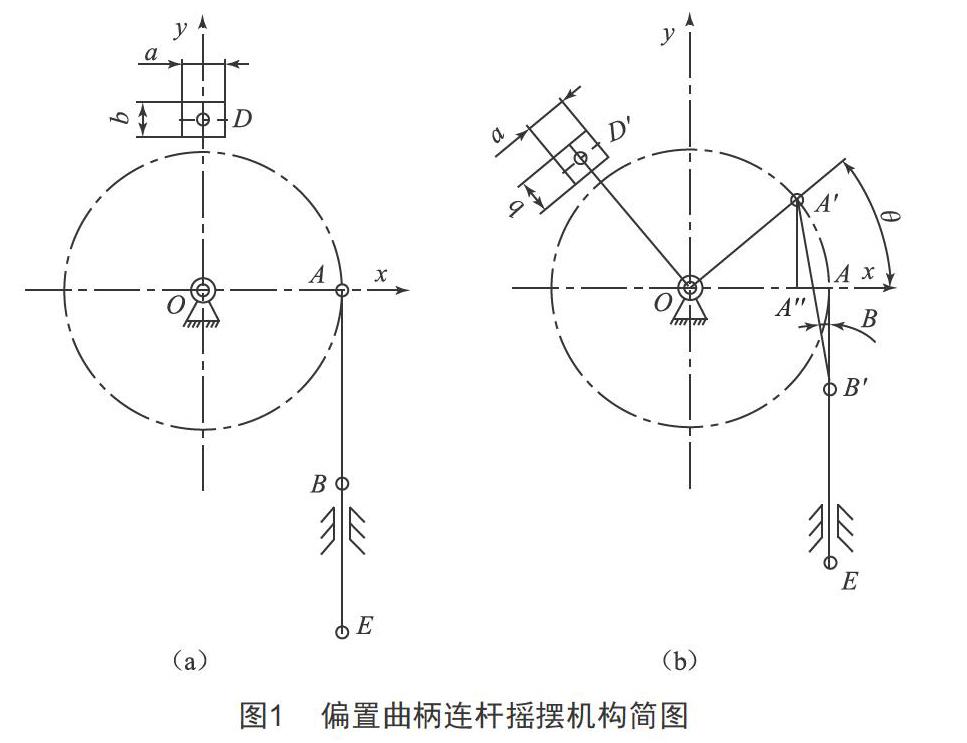
1 偏置曲柄连杆摇摆机构说明
图1为偏置曲柄连杆摇摆机构简图,曲柄OA的长为R1,质量为m1;中心转轴是半径为R2、长为L1、质量为m2的圆轴;杆OD的长为R3,质量为m3;在OD杆的顶端固连一个质量为m4、长为a、宽为b的长方体;滑杆AB长为L,质量不计,滑杆AB在设计过程中要求L/LA″A≥4;BE杆在滑槽内沿Y轴做上下运动,质量不计,角度θ的工作范围为-10°~10°。长为a、宽为b的长方体,曲柄OA,杆OD,质量为m2的圆轴固连为一个刚性连接体。图1(a)表示连杆OA在水平位置,连杆OA和AB处于垂直状态;图1(b)表示连杆OA转过一定角度对应的位置状态。
2 偏置曲柄连杆摇摆机构运动分析
2.1 运动方程建立
由于设计需求(图2(a))已经将连杆OA的转动角度限定在-10°~10°,滑杆AB的运动过程是由伺服电机控制,连杆OA的转动角度在-10°~
-8°以及8°~10°这个区间是伺服电机的加减速区间,-8°~8°这个区间是伺服电机的正常工作区间,滑杆BE受到周期性伺服电机的控制做上下运动,为机构提供动力,产生一个周期性的速度变化(图2(b)),在刚性体AOD上也将产生一个周期性的摇摆动作,根据图2(c)行程S与角度θ之间的关系,建立连杆BE的运动方程为:
LA″A=R1(1-cos θ)=Lsin β (1)
β=arcsinsin2 (2)
S=L+R1sin θ-=L+R1sin θ- (3)
∵已知条件-10°≤θ≤10°,可知:(1-cos θ)≈0。
∴ S≈R1sin θ (4)
公式(4)反映了连杆BE的运动矢量与角度之间的关系,两边分别对时间求导可以得到连杆BE的线速度以及连杆OA绕O点转动的角速度。对角度二次求导可以导出角加速度参数,这样就可以利用这些参数计算出各个零部件的运动转矩。
2.2 曲柄OA以转轴O旋转的角速度及角加速度
对公式(4)两边对时间求导,可以得到滑杆BE的运动线速度:
v==R1cos θ (5)
曲柄OA以旋转基点O旋转的角速度为:
ω= (6)
将公式(6)代入公式(5)可以得到:
v=ωR1cos θ (7)
由公式(7)得到:
ω= (8)
对公式(8)两边对时间求导得到曲柄OA以旋转基点O旋转角加速度:
?=ω′=
′== (9)
将公式(8)代入公式(9)得到:
?= (10)
3 偏置曲柄连杆摇摆机构受力分析
刚性连接体AOD围绕支撑点O做往复旋转运动,会根据速度的变化产生角加速度,由于自身有质量又会产生转动惯量,就会产生旋转扭矩。刚性连接体AOD的受力如图3(a)所示,连杆AB的受力如图3(b)所示,滑杆BE的受力如图3(c)所示。为便于设计工作的计算,连杆AB和滑杆BE的质量可以忽略不计,这样只要计算出刚性连接体AOD的转动惯量,就可以通过围绕O点的力矩的平衡原理计算出力F。
3.1 转动惯量计算
对m1、m2、m3、m4对应的J1、J2、J3、J4的转动惯量计算:
J1= (11)
J2= (12)
J3= (13)
J4=+m4R32= (14)
3.2 计算BE杆受到Y轴方向上的作用力F
因为围绕O点的各个力矩的矢量∑M=0,所以通过建立方程可以计算出作用A点的作用力FA,如图3(a)所示。
(J1+J2+J3+J4)α++m2g×0-
-m4gR3sin θ-FAR1=0 (15)
将公式(11)(12)(13)(14)代入到公式(15)中,得到:
FA=
+
+
+
·
+-
-m4 (16)
∵在图3(a)中:
F′cos (θ-β)=FA (17)
∵在圖3(c)中:
F′cos β=F (18)
∵滑杆AB在设计过程中通过作图法要求AB杆的长度L/LA″A≥4:
∴ β≈0° (19)
通过公式(17)(18)(19)可以推导出:
F= (20)
将公式(16)代入公式(20),得到:
F=
+
+
+
·
+-
-m4 (21)
对公式(21)分析可以知道外部需要提供力F与各个参数之间的关系,运动构件的质量、外形尺寸、连杆OA与水平轴X之间的夹角、滑杆的运行速度v等越大,需要的力F越大。通过上面的分析可知,在设计过程中要尽量减小各个构件的质量与外形尺寸,用较小的夹角来满足运动需求,只有这样设计出来的运动架构才能以较小的力满足使用要求,达到环保、节能、高效的目标。
4 结语
偏置曲柄连杆摇摆机构在实际生产生活中被广泛运用,通过对偏置曲柄连杆摇摆机构的运动分析及受力分析,我们知晓了偏置曲柄连杆摇摆机构是如何实际工作的,对后续设计有很大的参考意义,使得进一步优化设计有了依据,做到了在提高产品质量和技术性能方面有据可依。
在实际工作中需要充分利用经济、技术、生产等各类原理知识,使偏置曲柄连杆摇摆机构的设计工作更加优化,充分利用各种有利因素,不断对产品进行整合创新,使其满足设计使用功能的需求。
[参考文献]
[1] 成大先.机械设计手册[M].5版.北京:化学工业出版社,2008.
收稿日期:2020-04-01
作者简介:徐智(1971—),男,江苏人,工程师,研究方向:食品机械设计。
