犁旋组合式油菜直播机扣垡装置设计与试验
2020-06-29魏国粱张青松刘立超肖文立孙文成廖庆喜
魏国粱 张青松 刘立超 肖文立 孙文成 廖庆喜
(1.华中农业大学工学院, 武汉 430070; 2.农业农村部长江中下游农业装备重点实验室, 武汉 430070)
0 引言
油菜是重要的油料作物,我国油菜种植区域可分为冬油菜和春油菜两大产区[1],其中冬油菜占总种植面积90%以上。长江中下游地区是我国冬油菜的主产区,该区域种植模式以稻-油水旱轮作为主[2]。
长期以来,油菜播种受前茬水稻收获后留茬高、秸秆量大等影响,传统旋耕易出现作业耕深浅、秸秆埋覆率低等问题,油菜直播种床耕整作业难度大[3]。在实际生产中,长江中下游稻油轮作区多采用先铧式犁深翻、后旋耕的耕整方式,能解决传统旋耕机耕深浅等问题,但其工序复杂,不利于抢农时,且对土壤产生二次碾压[4-5]。
针对传统耕整方式的不足,秦宽等[6]设计了犁翻旋耕复试作业耕整机,研究了作业过程中犁耕与旋耕的交互作用;刘晓鹏等[7]为解决油菜种植时因秸秆量大而导致机具易缠草、堵塞的问题,设计了驱动圆盘犁对置组合式耕整机,一次作业能完成种床耕整;王金武等[8]为解决水稻秸秆还田机传统旋耕部件耕深较浅、秸秆还田深度不足等问题,研制了水稻秸秆整秆深埋还田装置,作业效果良好;MATIN等[9]研究了带状旋耕中3种不同刀片在不同作业参数下的扭矩变化规律;WEISE[10]研究了联合耕整机作业功耗与前进速度的关系。国内外学者在复式耕整机[11-15]和旋耕优化研究[16-19]上取得了较多成果,但对扣垡作业研究较少。本文针对长江中下游稻油轮作区油菜直播作业时,因前茬水稻留茬高、秸秆量大而导致旋耕部件作业耕深浅、埋茬率低的问题,设计一种与油菜直播机配合,通过先抬、后扣的作业方式,实现高茬粘重土壤有序翻埋的扣垡装置,并集成犁旋组合式油菜直播机,以期一次作业可完成秸秆翻埋、碎土平整、开畦沟、施肥、播种等作业工序。
1 总体结构与工作过程
1.1 总体结构
犁旋组合式油菜直播机主要由扣垡装置、旋耕装置、开畦沟装置、排种装置和排肥装置组成,如图1所示。扣垡装置包括呈对称布置的2组扣垡犁和安装于中间位置的对称翻垡犁,开畦沟装置包括呈对称布置的前后组合式铧式犁,排种装置选用离心式油菜精量排种器[20]。整机种床耕整主要技术参数如表1所示。
1.2 工作过程
犁旋组合式油菜直播机由轮式拖拉机提供动力,作业时,扣垡装置通过呈对称布置的2组扣垡犁和对称翻垡犁完成横向1 540 mm厢面土壤的翻埋、侧边扣垡、埋茬作业;旋耕装置由PTO输出动力,完成碎土、土壤侧向输送和平整厢面作业;由对称布置在旋耕装置两侧的开畦沟前犁完成两侧深耕和深耕盲区底层土壤的扰动,即减小深耕盲区作业和破土作业,开畦沟后犁作业形成完整畦沟;同步的排肥装置排出肥料,完成施肥作业;排种装置排出油菜种子,经导种管投放至作业形成的种床。

图1 犁旋组合式油菜直播机结构示意图Fig.1 Schematic of plowing-rotating combined rapeseed direct seeding machine1.排种装置 2.排肥装置 3.旋耕装置 4.主机架 5.三点悬挂 6.开畦沟后犁 7.开畦沟前犁 8.对称翻垡犁 9.扣垡犁

表1 犁旋组合式油菜直播机种床耕整主要技术参数Tab.1 Main technical parameters of seedbed tillage of plowing-rotating combined rapeseed direct seeding machine
2 关键部件设计与分析
2.1 扣垡犁
2.1.1扣垡犁曲面形成原理
铧式犁翻垡过程大致分为滚垡和窜垡两种形式,滚垡过程分为切土、抬垡和翻垡3个阶段,但在高茬水稻秸秆工况下,其翻垡阶段由于高茬水稻形成较强支撑,易造成回垡或立垡,难以完成土垡翻埋;窜垡方式作业时,土垡沿犁体曲面上窜到一定高度后悬空扣翻,高茬水稻秸秆工况下能实现土垡翻埋,但不规则土垡翻埋不利于下一步耕整作业[21]。基于土垡宽深比达到翻转后能处于稳定状态的要求,参考滚垡有序翻埋和窜垡高空扣翻的优点,提出土垡先抬后扣的侧边扣垡工艺方案,设计一种能实现高茬水稻秸秆工况下侧边扣垡功能扣垡犁。
根据直纹曲面形成原理,扣垡犁犁体曲面如图2所示。一空间母线AE沿着导线A-B-C-D,并按照单位向量变化规律(即与x轴夹角θ变化规律),自下而上平行移动,形成犁体曲面。主要包括犁铧、犁胸和犁翼3部分,犁铧完成破土、抬垡功能,犁胸使土垡向斜上方初步翻转和迁移,犁翼使土垡进一步翻转和下落,最终完成土垡侧边扣垡作业。

图2 扣垡犁犁体曲面形成原理图Fig.2 Schematic of surface formation of bucking plow body1.犁铧 2.犁胸 3.犁翼
2.1.2扣垡犁曲面参数分析与建模
扣垡犁犁体曲面的工作性能主要由导线、母线和单位向量变化规律决定。建立导线数学模型,如图3所示。第1段AB选取直线,对应犁铧部分;第2段BC选取抛物线,其斜率逐渐变大,易于翻垡,对应犁胸部分;第3段CD选取圆弧,其斜率增长较快,易于翻扣,对应犁翼部分。取各段端点A(0,0)、B(x1,z1)、C(x2,z2)、D(x3,z3),为使导曲线各段之间平滑过渡,过渡点斜率应相同,取点B、C斜率为tanα、tanβ。
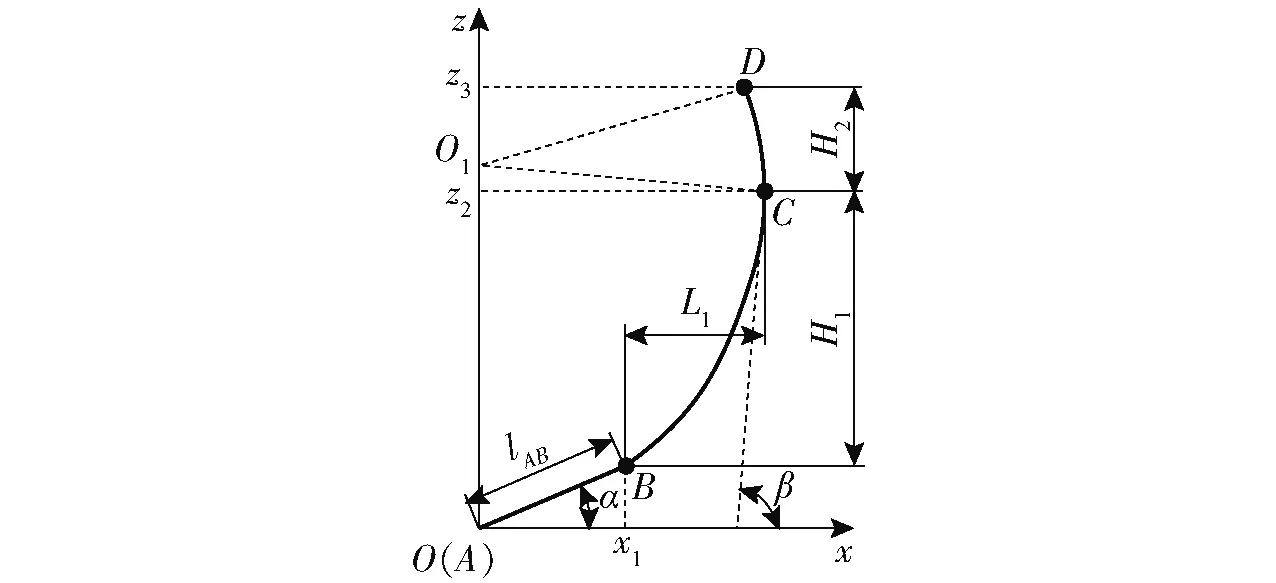
图3 导线形状与参数Fig.3 Guiding curve shape and parameters
导线参数方程为
(1)
式中k、b、c、d、h——常数
R——圆弧半径,cm
由图3几何关系可得
(2)
式中lAB——线段Ⅰ长度,cm
H1——曲线Ⅱ高度,cm
L1——曲线Ⅱ开度,cm
H2——曲线Ⅲ高度,cm
联立方程(1)、(2)可得
(3)
由式(3)可知,导曲线参数方程由线段Ⅰ斜率tanα和长度lAB、曲线Ⅱ的高度H1和开度L1、曲线Ⅲ的高度H2决定。参考农机设计手册犁体曲面导曲线设计方法[22],取入土角α为25°,lAB影响土垡提升高度,取15 cm,曲线Ⅱ开度L1取13.4 cm、高度H1取25.7 cm,曲线Ⅲ高度H2取10 cm,R取27.2 cm,代入式(3)求出常数k为0.47,b为3.75×10-2,c为0.40,d为6.14,h为20.87,得出导线参数方程。
扣垡犁用于油菜直播作业前的土壤翻埋,作业时不需形成完整的沟壁,通过土壤之间的相互撕扯形成不规则的矩形截面土垡,故扣垡犁设计宽度应小于实际作业幅宽。E点坐标为(l0tanθ0cosα1,l0,l0tanθ0sinα1),其中l0为扣垡犁宽度,θ0为AE与AB夹角,结合实际田间试验,取l0为20 cm,满足横向30 cm土垡扣垡作业,为提高犁铧入土性能,θ0取45°,则θ1为50°。
为使土垡能较完全地扣垡,取θ角变化规律为逐渐减小,且犁胸位置减小较慢尾翼位置减小较快,如图4所示,z0~z1段选取直线,z1~z3段选取抛物线,参数方程可表示为
(4)
式中a0——常数

图4 夹角变化曲线Fig.4 Curve of angle change
已知θ1为50°,z1为lABsinα1,z3为42 cm,参考农机设计手册犁体曲面元线角设计方法,取Δθ为10°,因此θ3为40°,代入式(4)得a0为-7.9×10-3,故夹角θ在z1~z3段抛物线开口向下,形成犁胸至尾翼这部分空间曲面时,空间母线与犁体前进方向相反方向的夹角逐渐变小,且犁胸位置减小较慢,尾翼位置减小较快。
根据扣垡犁导线、母线和单位向量变化规律,制作犁体曲面样件,加工试制扣垡犁。
2.1.3犁体曲面扣垡过程分析
土垡在犁体曲面上的运动过程十分复杂,为分析其翻垡过程,取连续垡条中一段开展研究,作如下假设:①把所取某阶段土垡视做刚体,不考虑其内力和变形。②土垡在犁体曲面上运动时紧贴曲面。③土垡截面近似视作矩形。
扣垡犁作业时,犁铧破土形成矩形截面的土垡,经犁铧抬升后在犁胸位置初步翻转和进一步抬升,最后经尾翼翻扣,直至与犁体曲面脱离接触,运动轨迹简图如图5所示。当土垡在犁铧上运动时,不发生翻转,土垡受力可合成至质心位置,建立动力学方程
(5)
式中m——土垡质量,kg
ax——土垡x轴方向加速度,m/s2
ay——土垡y轴方向加速度,m/s2
az——土垡z轴方向加速度,m/s2
N——犁铧对土垡支持力,N
G——土垡自身重力,N
Ft——下方土垡对其挤压力,N
Fs——上方土垡对其反作用力,N
f——犁铧对土垡的摩擦阻力,N

图5 土垡运动轨迹与犁铧位置受力简图Fig.5 Schematic of track of motion of furrow slice and force of plowshare position
由式(5)可知,土垡在犁铧上运动时,土垡y轴方向加速度为0,因此可得土垡受合力为
(6)
故土垡在犁铧上运动时,所受合力与xz平面平行。土垡沿犁铧以夹角α向水平面斜上方运动至犁胸位置,完成土垡上抬作业。
当土垡运动至犁胸位置,所受作用力为空间任意力系,不仅在外力作用下沿着犁胸向斜上方运动,同时会发生翻转,其受力分析如图6所示,并建立动力学方程
(7)
式中Nxz——犁铧对土垡支持力在xz面分力,N
Ftxz——下方土垡对其挤压力在xz面分力,N
Fsxz——上方土垡对其反作用力在xz面分力,N
fxz——犁铧对土垡摩擦阻力在xz面分力,N
δ——土垡位置切线与x轴夹角,(°)
My——土垡绕y轴转动的扭矩,N·m
la、lb、lc、ld——各受力相对质心的力臂,m

图6 土垡犁胸位置受力简图Fig.6 Schematic of force of furrow slice at position of plow chest
土垡在犁胸位置运动时,由于犁体曲面对土垡作用力合力方向不经过质心,土垡会产生翻转。由图6和式(7)可知,土垡所受作用力在xz平面上合力使土垡运动在xz平面分量表现为向斜上方运动,且产生绕y轴转动力偶。由导线和单位向量与x轴夹角θ变化规律几何关系可知,土垡在犁胸位置主要为沿犁胸向斜上方迁移和绕y轴转动;由于土垡所受空间力系不平衡,土垡同时沿x、z轴产生一定翻转。
当土垡运动至犁翼位置,犁面对土垡作用力方向改变,使土垡向下翻扣,其受力分析如图7所示。

图7 土垡犁翼位置受力简图Fig.7 Schematic of force of furrow slice at position of plow blade
土垡在犁翼位置运动时,由导线几何性质和单位向量与x轴夹角θ变化规律可知,导线为圆弧,且单位向量与x轴夹角θ减小逐渐加快,土垡运动主要为沿x轴转动,直至与犁体曲面脱离接触。
综上可知,土垡在犁体曲面上的运动过程为先沿犁铧以夹角α沿水平面斜上方运动至犁胸位置;然后土垡主要沿犁胸向斜上方迁移并绕y轴转动,同时在x、z轴方向产生一定翻转;土垡在犁翼位置主要表现为沿着x轴转动,直至与犁体曲面脱离接触,在自身重力作用下落地,完成翻转作业,故设计的直纹曲面能实现土垡先上抬后翻扣的功能。
2.2 扣垡装置
扣垡犁宽度为200 mm,耕作宽度为300 mm,对称翻垡犁宽度为250 mm,耕作宽度为340 mm;扣垡装置由对称布置的2组扣垡犁和安装于中间位置的对称翻垡犁组成,相邻的2个扣垡犁横向中心安装间距为300 mm,相邻的扣垡犁和对称翻垡犁横向中心安装间距为320 mm,而单个扣垡犁由于作业时两侧土壤撕扯,平均耕宽应在300 mm以上,能避免漏耕,扣垡装置理论作业幅宽为1 540 mm。作业时,安装于前端的扣垡犁先将土垡翻埋至未耕地表,位于后侧的扣垡犁将紧挨的土垡翻埋至前一犁体作业形成的槽沟,对称翻垡犁将厢面中间未耕土垡对称切割,并通过两侧犁体曲面将切割后两土垡翻转。扣垡犁结构示意图如图8a所示,对称翻垡犁结构示意图如图8b所示。

图8 扣垡犁和对称翻垡犁结构示意图Fig.8 Structural diagrams of symmetrical buckle plow1.扣垡犁犁柱 2.扣垡犁犁体曲面 3.扣垡犁犁铧 4.对称翻垡犁犁柱 5.对称翻垡犁犁体曲面 6.对称翻垡犁破土刃 7.对称翻垡犁犁铧
对称翻垡犁作业时,土垡沿犁铧向上运动,同时破土刃完成土垡对称切割,减小土垡断裂处土壤撕扯,避免因两侧土壤不均匀造成堵土;为避免夹土和秸秆拖拽,破土刃口垂直于水平面。对称翻垡犁曲面由2个对称的翻垡犁体曲面焊合胫刃线形成,单侧犁体曲面设计采用水平直元线法,为使其具有较好的翻垡效果,犁体曲面设计为半螺旋型。
2.3 旋耕装置与开畦沟装置
扣垡装置作业后厢面土壤呈对称分布,且外侧多中间少,旋耕装置完成碎土作业的同时,需同步实现土壤向厢面内侧迁移的功能,达到厢面平整的目的。旋耕装置作业时,单个旋耕刀片做余摆线运动,切削形成的垡块向斜后方抛撒。旋耕刀辊采用双头螺旋排布方式,为实现旋耕刀辊使土壤向厢面内侧迁移的功能,提出一种同一回转平面内“倒U”形安装方式,左刀辊安装右弯刀,作业时切削垡块向右后方抛撒,右刀辊安装左弯刀,作业时切削垡块向左后方抛撒,达到土壤向中间输送的目的。
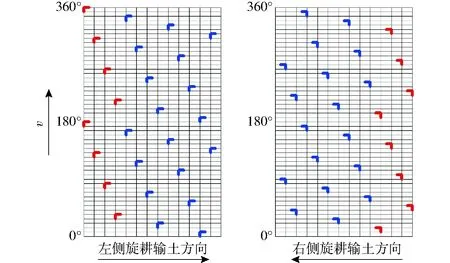
图9 犁旋组合式油菜直播机旋耕装置刀片排布示意图Fig.9 Schematic of blade arrangement of rotary tillage device of plowing and rotary tillage combined rape seed direct seeder
旋耕装置左右刀辊均为26把,同一回转平面两刀夹角取180°,旋耕刀采用双头螺旋排列方式,其中同一螺旋线轴向相邻两刀夹角为70°,刀座间距为70 mm;为减小深耕盲区对种床影响,同时提高土壤向内侧输送能力,适当增大深耕盲区旋耕耕深,参考GB/T 5669—2017 《旋耕机械 刀和刀座》[23],内侧刀片选取ⅡT245旋耕刀,外侧刀片选取ⅡT260旋耕刀。犁旋组合式油菜直播机旋耕装置刀片排布如图9所示。
选取前后组合式开畦沟装置[24],主要由铧式前犁和铧式后犁组成。扣垡装置作业后,铧式前犁完成畦沟破土、外侧土垡翻垡和扰动,将外侧土垡输送至旋耕刀辊,同时减小种床未深耕盲区,旋耕装置完成土壤细碎、平整和内侧输送,铧式后犁完成畦沟整形,形成适宜油菜播种的种床。
3 田间试验
3.1 试验条件与设备
为验证设计的扣垡装置功能和犁旋组合式油菜直播机作业性能,于2019年9月在华中农业大学现代农业科学试验基地开展扣垡犁单体试验,于2019年10月在湖北省监利县华中农业大学稻-油轮作全程机械化生产示范基地开展犁旋组合式油菜直播机作业性能试验,以成熟应用的且仅有旋耕装置的2BFQ-8型油菜直播机[25](以下简称旋耕式油菜直播机)为对照。试验田块均常年采用稻-油轮作模式,土壤为偏黏性土,试验前各田块工况如表2所示。

表2 试验田块工况参数Tab.2 Working condition parameters of test field
扣垡装置功能性试验和犁旋组合式油菜直播机作业性能试验配套动力分别为东方红954型和东风井关954型轮式拖拉机,试验器材包括:直尺(500 mm)、卷尺(5 m)、磁性水平尺(三箭工具有限公司,精度0.002 9°)、土壤坚实度仪(浙江托普仪器有限公司,TJSD-750Ⅱ型,±0.5%)、土壤取样环刀、干燥箱等。
3.2 试验方法
扣垡装置功能性试验为扣垡犁单体在长江中下游高茬粘重地表扣垡效果的验证,其中左侧扣垡犁与右侧扣垡犁呈对称布置,中间保持合适安装距离,避免左右两扣垡犁作业时产生干涉,通过安装于机架两侧限深轮控制扣垡犁作业深度。试验前调节限深轮高度,使犁耕深度为180~200 mm;通过调节拖拉机挡位和手油门位置,使试验台架平均作业速度为2.5 km/h。试验机组沿直线方向作业距离为40 m,取中间行程30 m为测量区域,每组试验重复3次,参考GB/T 14225.3—93《铧式犁试验方法》,确定试验以扣垡率为评价指标,土垡在翻转后其残茬表面与水平面夹角小于90°为扣垡,扣垡犁单体作业后扣垡率为
(8)
式中r——扣垡率,%L2——扣垡长度,m
L——测量区域长度,m
犁旋组合式油菜直播机作业性能试验为对比研究犁旋组合式油菜直播机和旋耕式油菜直播机在长江中下游高茬水稻秸秆工况下种床耕整效果,犁旋组合式油菜直播机如图10所示。犁旋组合式油菜直播机旋耕额定转速为240 r/min,试验前通过调节拖拉机上拉杆高度和液压手柄位置保证犁耕作业深度为180~200 mm,旋耕深度为90~110 mm,调节拖拉机挡位和手油门位置保证整机平均作业速度为2.5 km/h;旋耕式油菜直播机旋耕额定转速为270 r/min,耕深为80~120 mm,试验前调节拖拉机挡位和手油门位置保证平均作业速度为2.5 km/h。试验机组沿直线方向作业距离为40 m,取中间行程30 m为测量区域,每组试验重复3次。参考NY/T 499—2013《旋耕机 作业质量》、GB/T 5668—2008《旋耕机》和NT/Y 2709—2015《油菜播种机 作业质量》,结合油菜种植农艺要求,确定试验以耕深及其稳定性系数、厢面平整度、碎土率和秸秆埋覆率为评价指标。

图10 试验机具实物Fig.10 Physical map of test machine
3.3 试验结果与分析
3.3.1扣垡犁单体田间功能性试验
扣垡犁在高茬水稻秸秆工况下具有较好的扣垡效果,由表3可知,扣垡犁作业平均耕深在182~191 mm之间,平均扣垡率为93.41%,耕深稳定性系数高于92%,能较好地实现高茬水稻秸秆扣垡功能;平均耕宽在300 mm以上,满足扣垡犁耕宽设计要求,耕宽稳定性系数在73.26%~81.65%之间,分析认为扣垡犁破土抬垡作业时通过土壤之间相互撕扯,不形成完整沟壁,实际耕宽大于扣垡犁设计幅宽,耕宽稳定性系数较低是合理的。
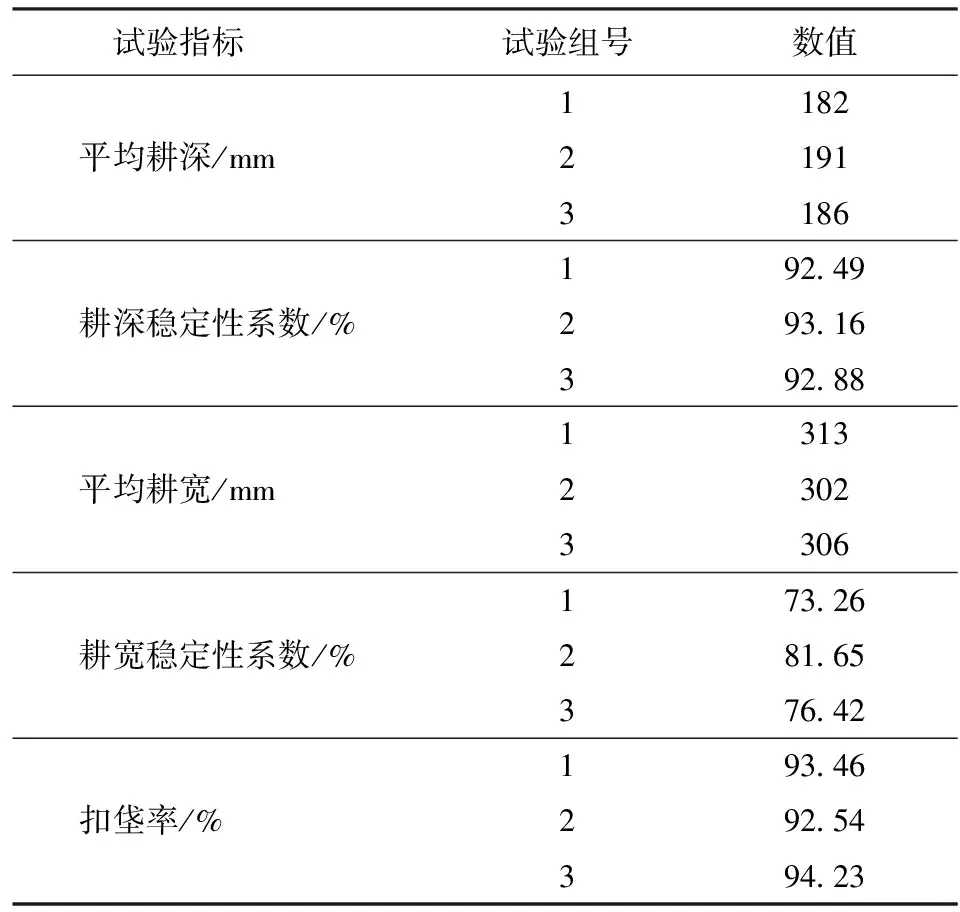
表3 扣垡犁田间试验结果Tab.3 Field test results of buckle plow
扣垡犁单体能较好地实现扣垡功能,故扣垡装置具有较好的作业性能。
3.3.2整机田间对比试验
犁旋组合式油菜直播机在高茬水稻秸秆工况下具有较好的种床耕整效果,田间作业效果如图11所示;犁旋组合式油菜直播机和旋耕式油菜直播机耕深及其稳定性系数、厢面平整度和碎土率均满足油菜播种要求,作业后各评价指标见表4。

图11 整机田间作业Fig.11 Field test of complete machine
由表4可知,在工况2、3下,犁旋组合式油菜直播机平均耕深分别为249、231 mm,相对旋耕式油菜直播机平均耕深分别提高了137、110 mm;秸秆埋覆率分别为90.35%、91.24%,相对旋耕式油菜直播机秸秆埋覆率分别提高了33.94、28.36个百分点。
在高茬水稻秸秆的工况下,旋耕式油菜直播机作业时旋耕刀先与地表秸秆接触,由于水稻秸秆韧性强,旋耕刀无法有效切断秸秆,影响其切削土壤能力,导致整机耕深和秸秆埋覆率较低。而犁旋组合式油菜直播机作业时,通过扣垡装置埋覆秸秆,旋耕装置细碎平整土壤,从而整机具有较好的作业深度和秸秆埋覆率。

表4 田间对比试验结果Tab.4 Field comparison test results
综上分析,在长江中下游稻油轮作高茬水稻秸秆工况下,犁旋组合式油菜直播机作业后耕深和秸秆埋覆率明显优于旋耕式油菜直播机,提高了作业功效和油菜种床耕整质量,达到了油菜种床耕整要求[26]。
4 结论
(1)为提高油菜直播时的作业耕深和秸秆埋覆率,设计了一种通过先抬、后扣的作业方式,实现高茬粘重土壤有序翻埋的扣垡犁,并集成了与油菜直播机配合作业的扣垡装置,研发了犁翻旋耕组合式油菜直播机。分析阐述了扣垡犁曲面形成原理,确定了其关键影响因素导线、元线角、母线的数学模型,构建了土垡与扣垡犁力学模型,阐明了犁体曲面扣垡过程。
(2)扣垡犁单体田间功能性试验表明:在高茬秸秆工况下,扣垡犁平均耕宽在300 mm以上,满足扣垡犁耕宽设计要求;扣垡犁作业平均耕深在182~191 mm之间,平均扣垡率为93.41%,耕深稳定性系数高于92%,能较好地实现高茬水稻秸秆的扣垡功能,扣垡装置作业性能较好。
(3)在2种不同水稻秸秆工况下,两机具作业质量均满足油菜播种要求;犁旋组合式油菜直播机平均耕深分别为249、231 mm,相对旋耕式油菜直播机平均耕深分别提高了137、110 mm;秸秆埋覆率分别为90.35%、91.24%,相对旋耕式油菜直播机秸秆埋覆率分别提高了33.94、28.36个百分点,耕整效果优于仅有旋耕装置的油菜直播机。