基于视频信息的高精度事故重建方法研究*
2020-06-29石亮亮
吴 贺,韩 勇,2,石亮亮,许 伟
(1.厦门理工学院机械与汽车工程学院,厦门 361024; 2.福建省客车及特种车辆研发协同创新中心,厦门 361024;3.厦门大学航空航天学院,厦门 361005; 4.汽车噪声振动和安全技术国家重点实验室,重庆 400039)
前言
世界卫生组织统计结果表明,道路交通事故造成的死亡人数已上升至每年135万人,其中包括行人、二轮车骑车人及摩托车骑车人在内的弱势道路使用者(VRUs)占比高达54%[1],这一比例在发展中国家占比更高。我国作为典型发展中国家,2017年VRU死亡人数达45 615人[2]。因此,VRU在交通事故中面临的伤亡风险更应引起重视。
头部作为VRU受伤频率和严重度最高的身体部位[2],已在汽车安全领域广泛研究。研究表明,事故重建是分析VRU头部损伤较为有效的科学方法[3]。早期的事故重建大多仅对车速进行重建,且主要依赖于制动痕迹、行人抛距、散落物等信息通过经验公式完成[4]。多体数值模型的开发在推动事故重建发展的同时,也对重建精度提出了更高要求。验证车辆受损部位及人、车最终位置已被大量研究学者作为VRU运动学重建的有效性依据[5-6]。然而仅验证初始碰撞位置及最终位置难以保证VRU在空中运动学响应、旋转角度及着地部位与真实案例一致。研究表明,VRU在空中的旋转角度、着地部位以及落地姿态与头部损伤显著相关[7]。目前在我国,道路监控视频不断增多。基于视频信息不仅可得到VRU与车辆初始碰撞位置及最终位置等传统事故重建所需信息,同时还可得到VRU在空中运动学响应、落地姿态及着地部位等信息,为高精度VRU运动学重建提供了研究基础。
随着计算机与数值模型的发展,有限元人体数值模型被广泛应用于事故重建研究[8]。然而传统的事故重建多关注由车辆造成的头部损伤,而未考虑地面的影响。此外,传统事故重建多采用HIC15作为VRU头部损伤的单一评价指标[9],而HIC15仅考虑头部线性运动,由旋转运动导致的头部损伤是否也能用HIC15来评价无法判断。
本文中结合事故视频信息、DLT、多体系统及有限元法提出一种有效提高重建精度的事故重建方法。该方法首先采用多体模型对VRU运动学响应(包括初始碰撞位置、VRU空中的运动学响应、旋转角度及落地姿态等)进行重建;其次采用THUMS模型对VRU-车辆碰撞(一次碰撞)及VRU-地面碰撞(二次碰撞)进行头部损伤重建。该方法不仅提高了事故重建的精度,且为厘清VRU头部损伤来源与损伤机制提供了更为科学的研究手段。
1 方法与材料
1.1 事故重建流程
图1为事故重建流程,具体步骤如下:(1)事故案例筛选,在数据库VRU-TRAVi(the VRU traffic accident database with video)[10]中筛选两起典型的VRU事故案例,筛选条件为清晰完整的视频信息、车辆信息、人与车最终位置信息和详细的头部损伤信息;(2)车速计算,采用DLT方法分析视频,提取碰前车速及运动轨迹;(3)运动学重建,获取 PCCrash仿真中车辆减速度和VRU-车辆、VRU-地面及车辆 地面间的摩擦因数,代入MADYMO中,调整边界条件以获得与视频中VRU运动学相一致的重建结果;(4)头部损伤重建,提取MADYMO重建所得VRU头、胸、盆骨与车辆及地面碰撞的三轴线速度与角速度,分别代入THUMS中,获得头部运动学响应及颅内响应;(5)对比仿真结果与损伤报告以验证损伤重建的有效性;(6)完成重建。
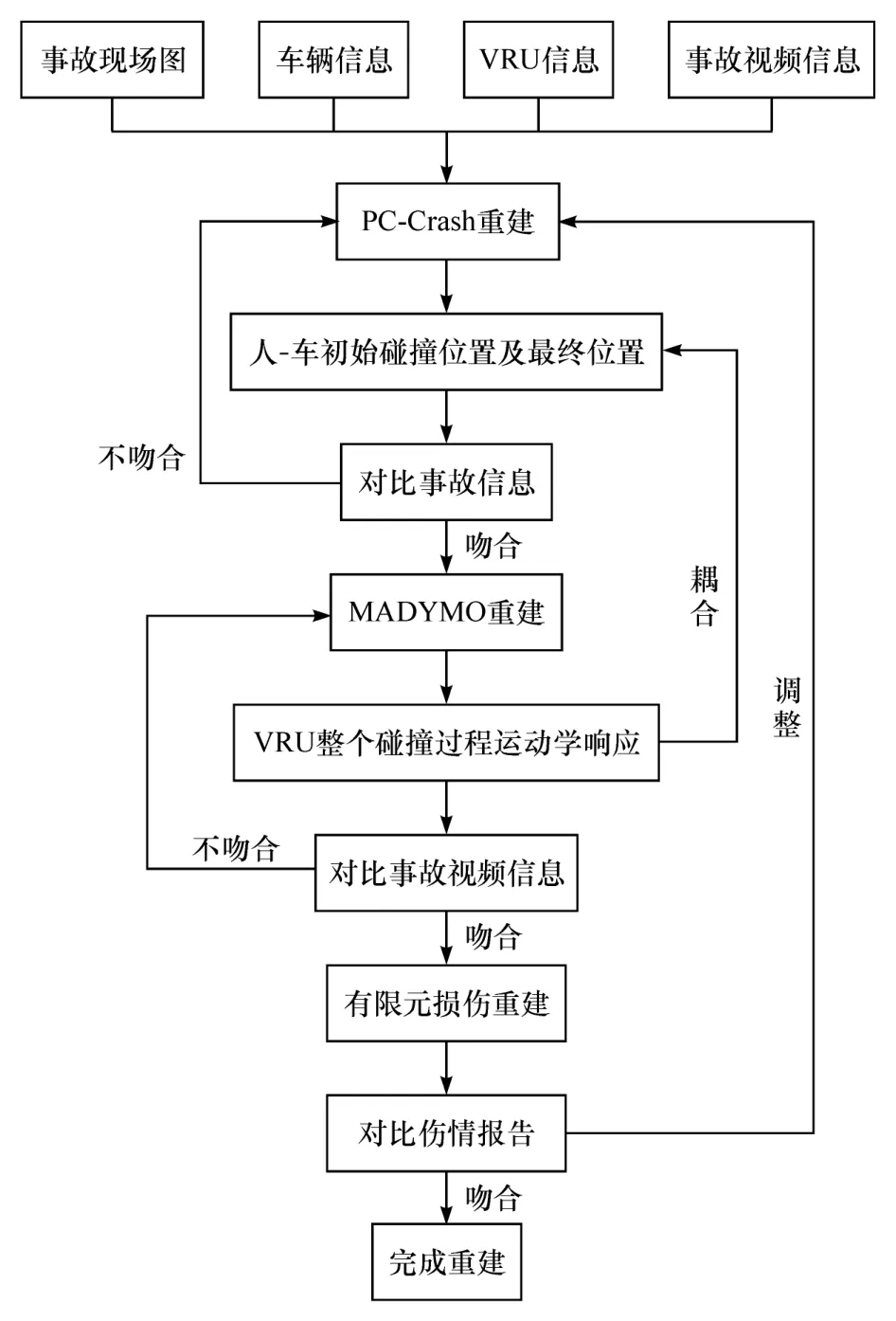
图1 事故重建流程
1.2 基于DLT的车速估算
DLT通过解析图像中像素坐标与物方坐标的透视变换关系建立事故车辆现场轨迹二维模型,进而求得车辆的运行轨迹和车速等信息[11]。假设车辆在竖直方向(Z向)的运动忽略不计,则对应物方坐标(X,Y)与像素坐标(u,v)之间满足以下关系式:
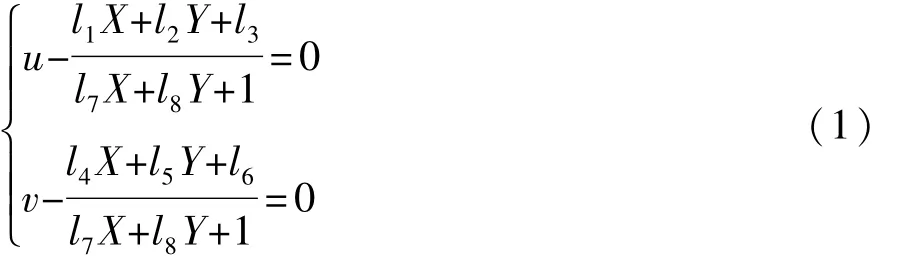
由式(1)得,已知图像中任意4点实际坐标与像素坐标,可求出l1,l2,…,l8,进而得物方坐标与像素坐标间的变换关系;而后基于视频信息选取代表车辆运动状态的标记点并读取其像素坐标;最后通过式(1)得出每一标记点的物方坐标,并进行积分和微分后可分别得车辆运动轨迹方程及车速方程。
1.3 多体与有限元模型
PC-Crash中车辆及行人模型动力学响应均基于实车试验进行了验证[12],车辆模型直接于PC-Crash数据库中获得;VRU模型根据真实身高、体质量及年龄缩放获取。MADYMO重建中VRU数值模型选择查尔莫斯理工大学团队开发的CPM行人模型,其生物力学特性已经过尸体试验进行了验证[13]。通过GEBOD程序对CPM假人模型的身高体质量缩放至与事故中行人身高体质量一致;车辆模型基于真实车辆的详细结构尺寸信息构建;同时参考Euro-NCAP测试结果定义车辆前部结构刚度曲线[14]。车辆前部各部位刚度特性如图2所示。
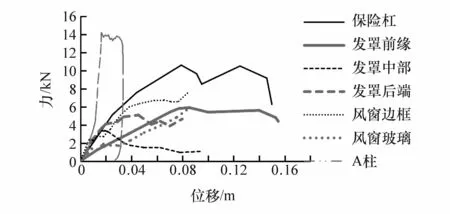
图2 车辆前部结构刚度特性
人体有限元模型采用由丰田中央研发室研发的THUMS人体模型[15],该模型具有详细的人体解剖学结构,包括骨骼、韧带、内脏等器官,头部模型包括大脑、小脑、脑干等详细的颅脑结构(图3(a))。车辆有限元模型(图3(b))采用一款经过头锤和腿型冲击器验证的模型[16]。该模型不仅具有详细的内部构造,同时风窗玻璃采用3层壳单元建模,内外两层模拟玻璃本体,中间一层模拟PVB(聚乙烯醇缩丁醛)材料。同时为综合考虑平移运动、旋转运动以及颅内脑组织应力应变造成的头部损伤,分别选择基于头部整体运动学响应的损伤评价指标HIC15、HIP(头部冲击能)、头部最大角速度、最大角加速度以及基于脑组织应力应变损伤评价指标颅内压力、冯氏应力、剪切应力、最大主应变作为本文中VRU头部损伤重建的评价指标。
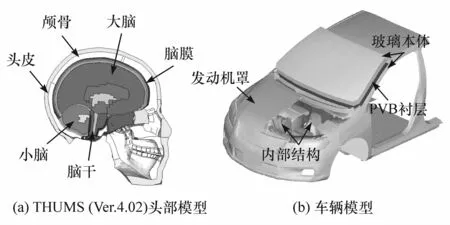
图3 有限元模型
2 车辆—行人事故重建
2.1 事故信息
2015年7月21日,一辆由南向北行驶的某轿车左前部与一名横穿马路的行人发生相撞(图4为事故现场示意图),行人因颅脑损伤送医救治无效死亡。由头颅CT检查可知,该行人的头部损伤信息包括:严重型颅脑损伤、双侧额顶硬膜下血肿、双侧颞叶脑挫裂伤、脑肿胀。
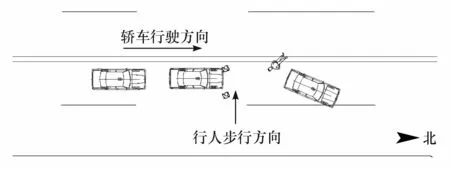
图4 事故现场示意图
2.2 车速估算
基于DLT求得的车辆运动轨迹如图5所示,A、B、C、D为4个控制点,E点为代表车辆运动轨迹的标记点,对车辆运动轨迹方程微分可得车辆在碰撞前一帧的车速为31.05 km/h。
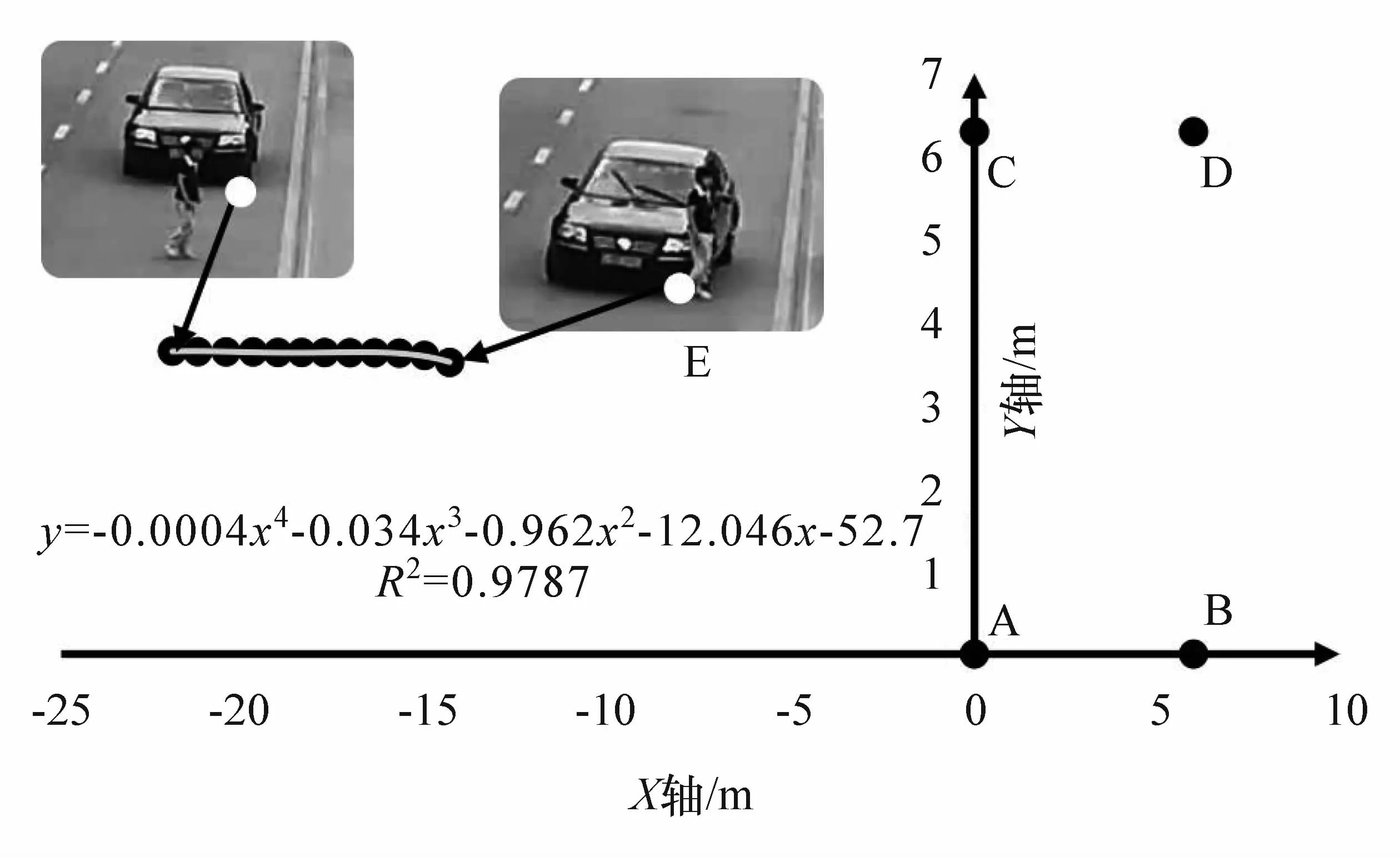
图5 车辆运动轨迹图
2.3 多体运动学重建
将碰撞车速、车辆 —行人碰撞位置、摩擦因数等边界条件带入PC-Crash进行重建,结果如图6(a)所示。车辆从开始碰撞到最终停止时的运动轨迹清晰可见,车辆前轮与道路边线间的实测距离和仿真距离分别为2.73和2.84 m,误差为4.0%;后轮与道路边线的实测距离和仿真距离分别为3.56和3.42 m,误差为3.9%;行人质心与近侧黄线间的实测和仿真距离分别为0.34和0.32 m,误差为5.9%。图6(b)为MADYMO重建所得车辆运动轨迹以及人、车最终位置。在PC-Crash与MADYMO重建中,最终位置误差均小于7%。完成车辆行驶轨迹及人、车最终位置重建后,对比视频信息进一步完成整个碰撞过程的运动学重建(图7所示)。将车辆即将与行人发生碰撞时刻定义为0时刻,由图7可知:车辆左前侧首先与行人左下肢发生碰撞;随后行人被抛向空中,行人旋转至约
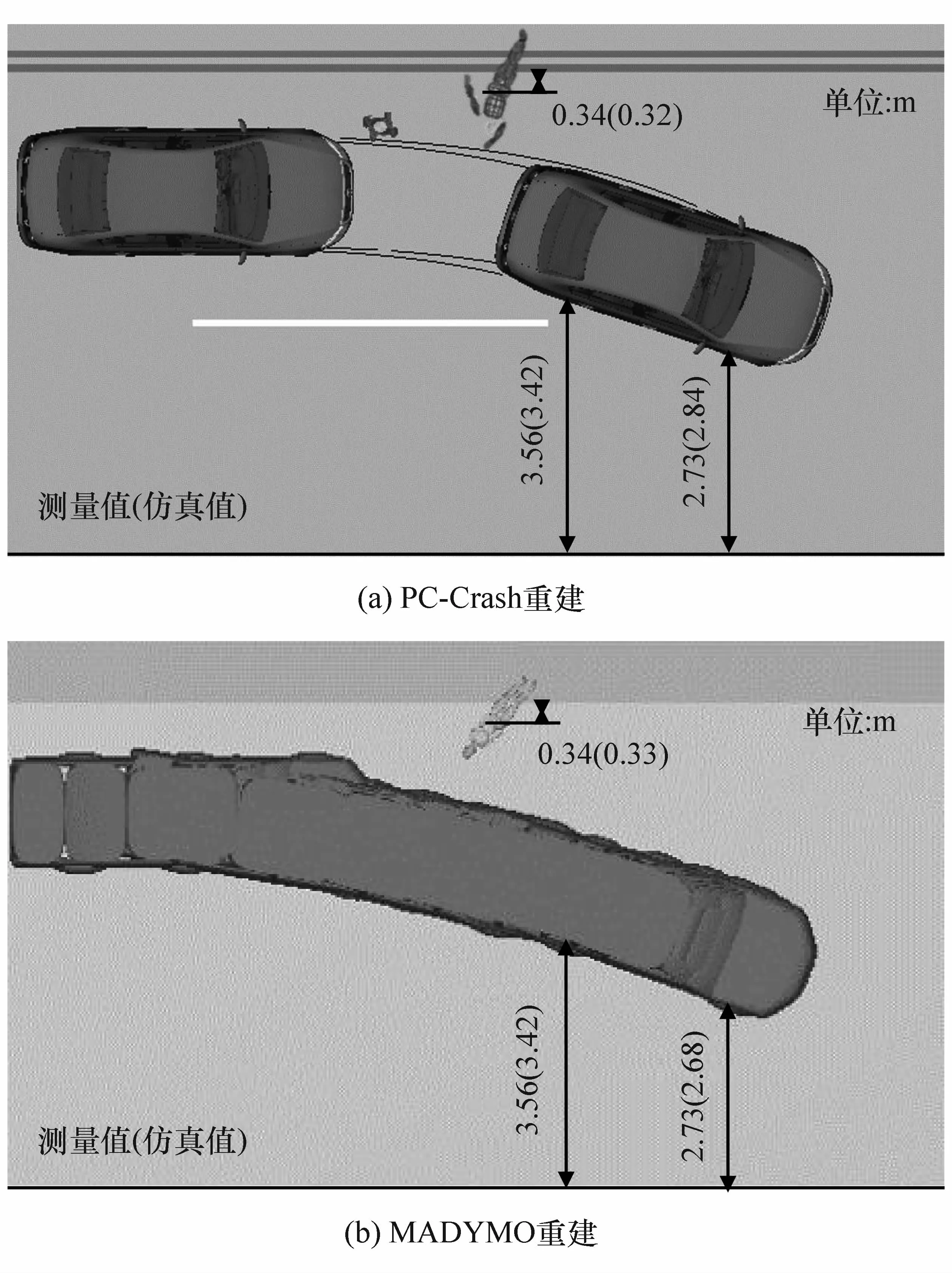
图6 多体系统事故重建结果与实测结果对比
135°时开始与地面碰撞,此时头部为第一着地点;随后行人胸部、盆骨以及下肢依次与地面接触。以上对比可见MADYMO重建的行人整体运动学响应与视频信息高度一致。
2.4 头部损伤重建
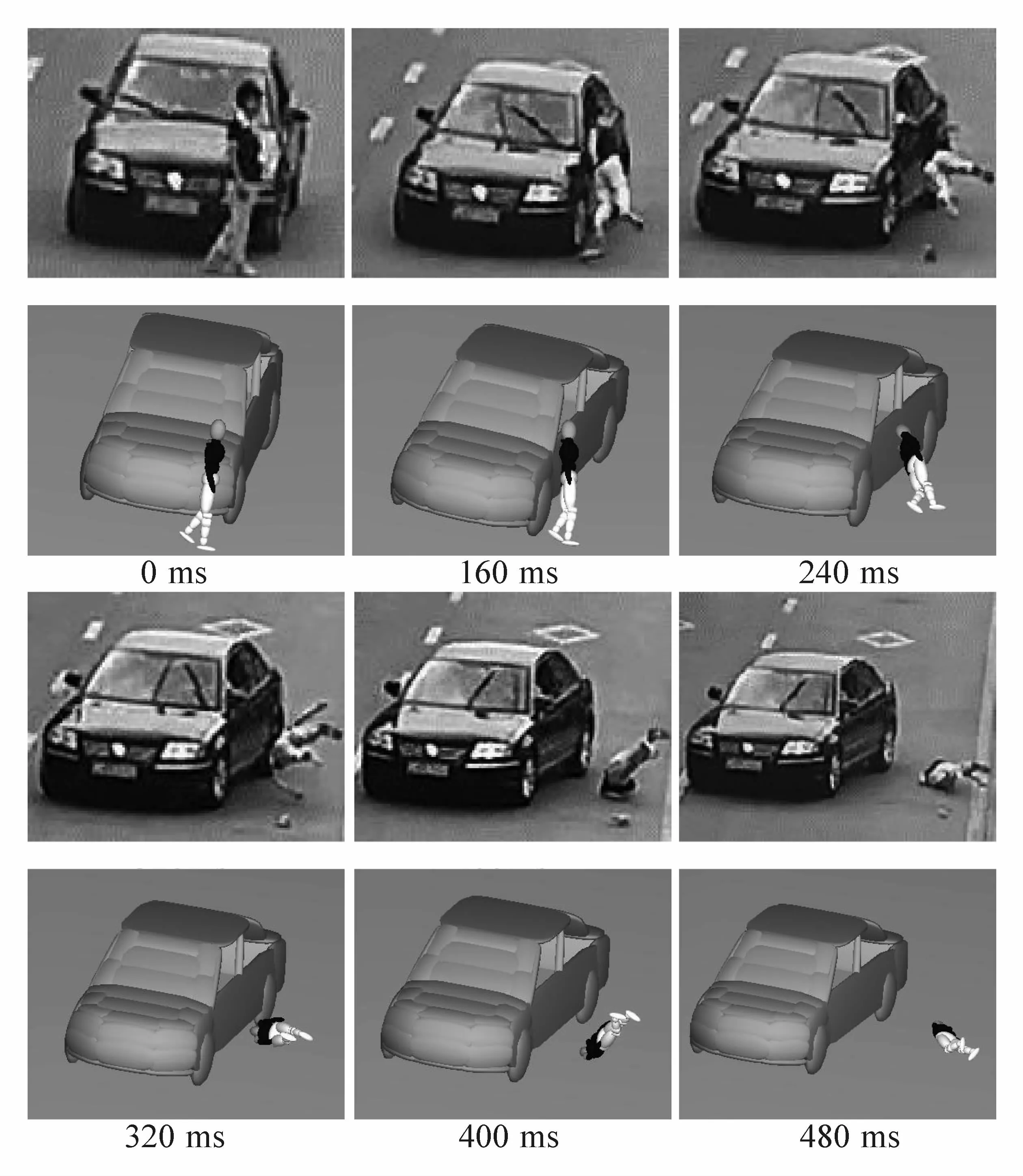
图7 行人运动学响应对比图
根据MADYMO重建结果,将行人头部与地面临撞时刻头、胸、盆骨部位的三轴线速度和角速度提取并加载至THUMS人体有限元模型进行损伤重建。
图8为头部运动学损伤评价指标的重建值。行人头部HIC15为1 359,HIP为140.2 kW,均超过颅骨骨折及重型脑损伤的阈值[17-18]。头部角加速度为14 700 rad/s2,角速度为 111 rad/s,均超过重度颅脑损伤发生的阈值[19]。
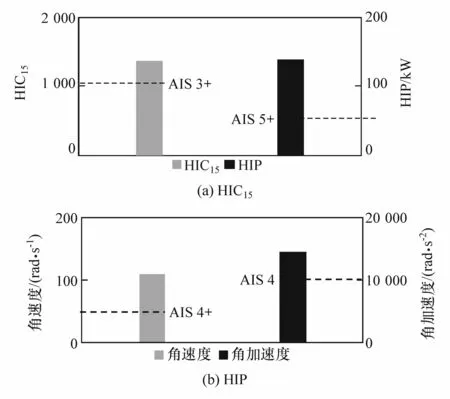
图8 行人头部整体运动学损伤指标
表1为颅内损伤评价指标重建值。额顶与颞叶处压力值最大且超过损伤阈值,与报告中行人双侧额顶、颞叶脑挫裂伤吻合。且冯氏应力、剪切应力和MPS均超过重度颅脑损伤的阈值,与报告中行人头部发生严重颅脑损伤相符[20]。
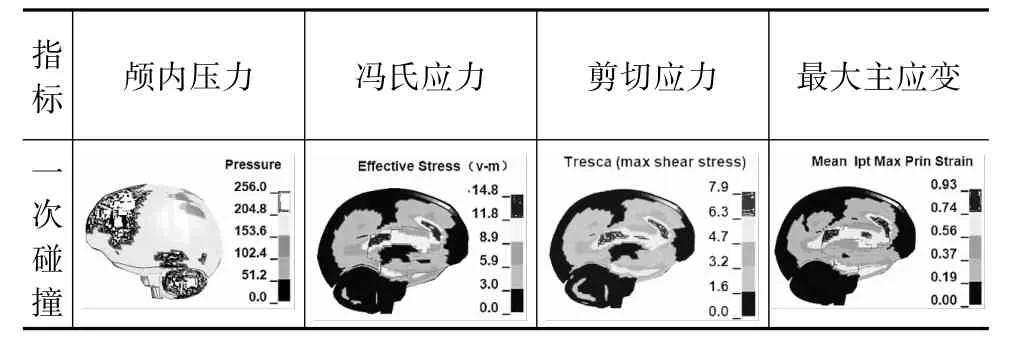
表1 行人脑组织应力应变云图
3 车辆—电动两轮车事故重建
3.1 事故信息
由北向南超速行驶的某轿车与由西北向东南方向变道行驶的电动两轮车相撞(图9所示),骑车人当场死亡。尸检报告显示死者右额至右眉外侧裂创,且鉴定意见书表明,死者主要致死原因为重度颅脑损伤。
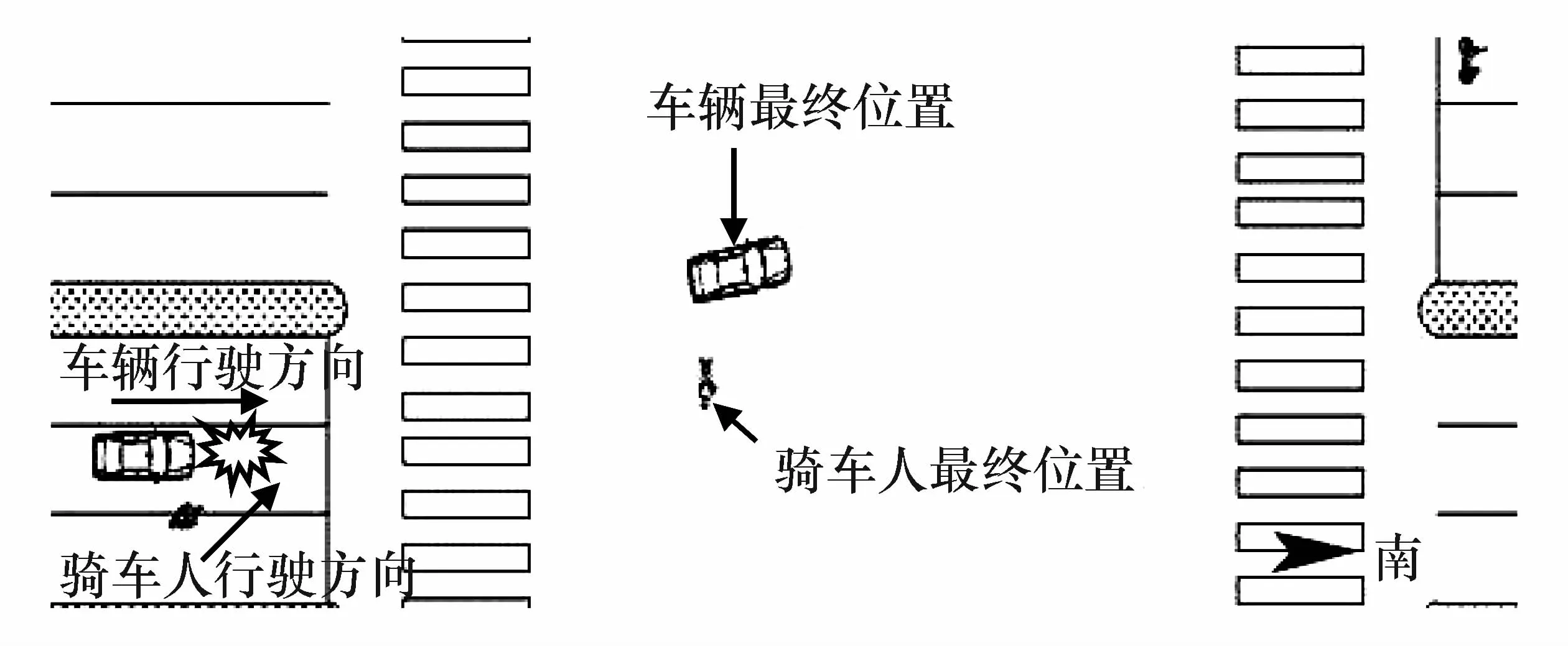
图9 事故现场图
3.2 车速估算
图10 为通过DLT所得车辆碰撞前行驶轨迹。通过对车辆行驶轨迹进行微分可得车辆在碰撞前一帧的车速为75.15 km/h。
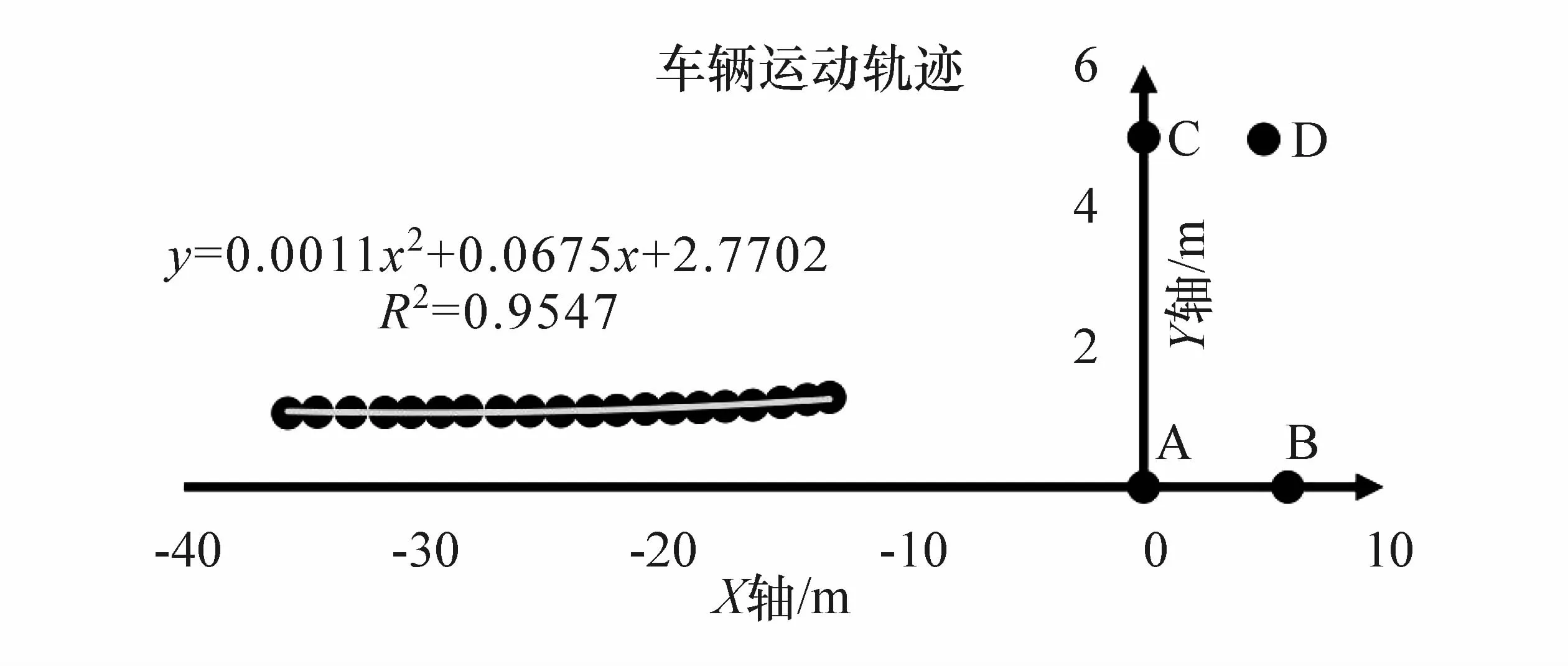
图10 车辆运动轨迹图
3.3 多体运动学重建
基于PC-Crash的人、车最终位置及车辆运动轨迹重建结果如图11(a)所示。车辆最终停止位置与初始碰撞位置的实测距离和仿真距离分别为37.2和37.3 m,误差小于1%;车辆与电动两轮车最终位置的实测距离和仿真距离分别为51.3和51.8 m,误差为1%。图11(b)为MADYMO重建得车辆运动轨迹及人、车最终位置,且最终位置误差小于6%。
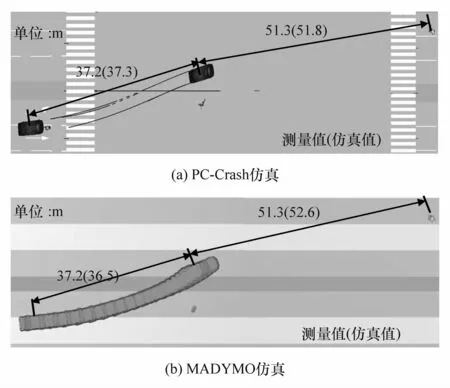
图11 多体系统事故重建结果与实测结果对比
骑车人整个碰撞过程的运动学重建结果如图12所示。车辆右前部首先与电动两轮车尾部发生相撞;随后骑车人臀部与发动机罩前部接触;而后骑车人被抛向空中,并在空中旋转至约210°时开始与地面碰撞(躯干与地面呈约60°),此时头部为第一着地点;最终骑车人胸部、盆骨以及下肢依次与地面接触。
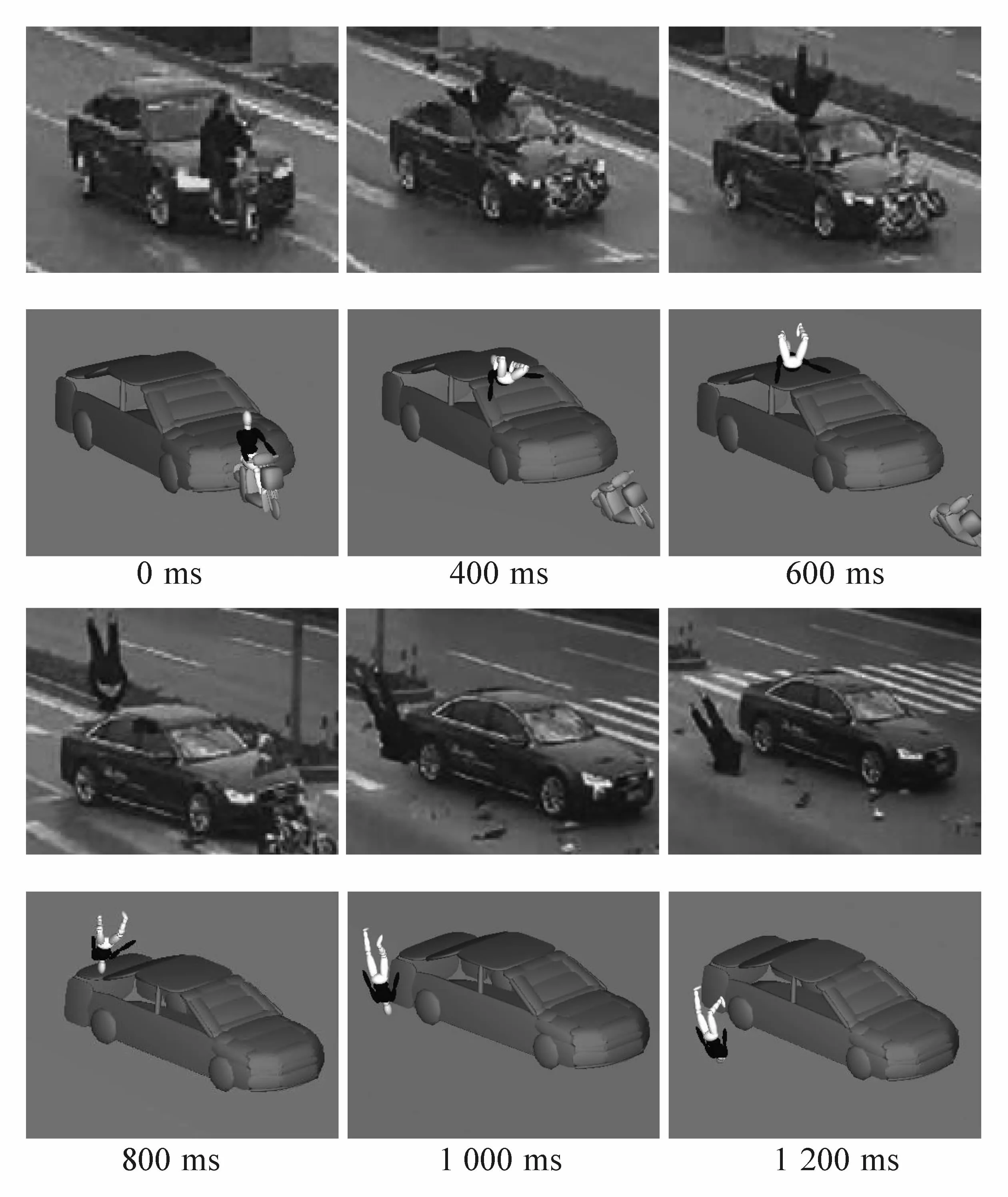
图12 骑车人运动学响应对比图
3.4 头部损伤重建
图13 为基于THUMS4.0.2重建所得的骑车人头部HIC15、HIP、最大角速度和角加速度。一次碰撞中骑车人头部 HIC15为254.3,HIP为46.22 kW,均未超过颅骨骨折及严重型脑损伤发生的阈值[17-18];且由视频信息可知头部枕骨与风窗玻璃发生碰撞,而损伤报告中并未显示枕骨受伤。二次碰撞中骑车人头部HIC15为2 494,HIP为119.02 kW,均超过了颅骨骨折以及严重型脑损伤发生的阈值;且视频信息显示骑车人右前额与地面发生碰撞,与损伤报告中右额至右眉外侧裂创损伤部位吻合。一次碰撞中,骑车人头部角速度与角加速度分别为57.92 rad/s和 19 418 rad/s2;二次碰撞中,头部角速度和角加速度分别为50.69 rad/s和47 593 rad/s2。虽然一次碰撞和二次碰撞头部角速度与角加速度均超过了重度颅脑损伤发生的阈值[19],且二次碰撞的角速度与一次碰撞相差不大,但二次碰撞角加速度远大于一次碰撞。基于头部损伤部位及重建结果知,骑车人重度颅脑损伤主要由地面造成。
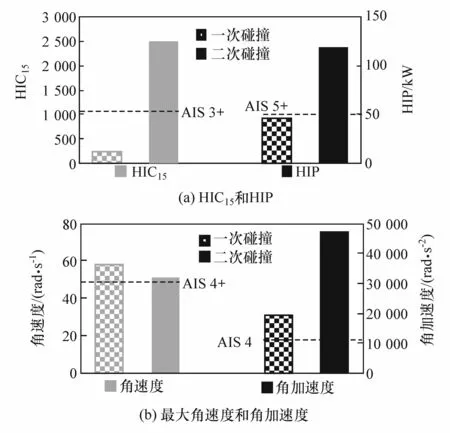
图13 骑车人头部整体运动学损伤指标
表2为骑车人头部损伤重建中颅内压力、冯氏应力、剪切应力以及最大主应变的应力应变云图。一次碰撞中,骑车人头部颅内压力、冯氏应力、剪切应力以及最大主应变分别为255、4.15、2.39 kPa和0.381,且除了颅内压力超过损伤阈值外,其余指标均未超过损伤阈值[20]。二次碰撞中,骑车人颅内压力、冯氏应力、剪切应力以及最大主应变分别为1 056、20.96、12.1 kPa和1.449,所有指标均远超过脑损伤的阈值,与尸检报告相符,进一步断定骑车人重度颅脑损伤主要由地面造成。
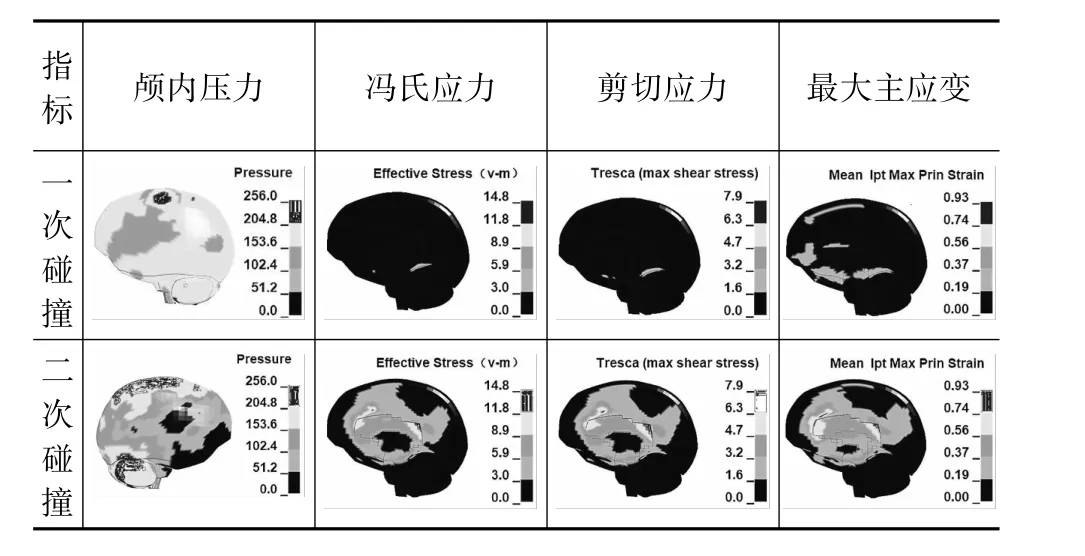
表2 骑车人脑组织应力应变云图
4 结论
(1)采用视频与DLT相结合的车速分析方法,可精确计算车辆的运动轨迹及碰前瞬时车速,保证了车速重建的有效性。
(2)基于PC-Crash和MADYMO对车辆轨迹及VRU运动学响应重建,保证了车辆-VRU碰撞过程、VRU旋转角度、落地姿态及第一着地部位均与视频信息一致,并控制人、车最终位置绝对误差在7%以内。
(3)采用 THUMS 4.0.2人体有限元模型对VRU一次碰撞和二次碰撞的颅脑损伤进行深度重建,厘清了颅脑损伤来源,为VRU头部损伤机制的进一步研究提供依据。