基于稳定性指标的分段弧腿式搜救机器人越障建模与步态设计
2020-06-28李秉宣张世月苏卫华
李秉宣,张世月,苏卫华*
(1.军事科学院国防科技创新研究院,北京 100071;2.天津(滨海)人工智能创新中心,天津 300457)
0 引言
弧腿式机器人[1]具有结构简单、地形适应能力强等优点,但此类机器人的结构特殊,导致运动过程中质心波动较大且能量利用效率较低。机器人运动过程中较大的质心波动会给多数载荷模块(如视觉、雷达、陀螺仪等)带来较大的伪差,降低工作效率。此外,较高的能量损耗也会降低机器人续航。因此设计既能满足越障需求,又能保证较低的质心波动和能量损耗的合理步态成为提升搜救机器人性能的关键。
针对六足机器人的步态规划,McGhee等[2]描述和分析了多足机器人步态的数学定义。李博扬等[3]和陈卓等[4]提出了机械臂和串联机器人的运动学分析方法,为弧腿机器人的步态规划提供了参考。王佳欣[5]提出了下肢运动学参数信号的提取方法,为步态进行仿生借鉴打下了坚实基础。黄麟等[6]基于仿生运动机理,设计了六足机器人三角步态。张春阳等[7]对六足机器人规划了纵向三角步态。刘盾[8]则详细描述了六轮腿式移动机器人越过障碍物的姿态调整过程。同时,还有采用强化学习,利用中枢模式发生器(central pattern generator,CPG)规划步态的方法[9-12]。以上研究仅单独研究了典型步态或越障步态,割裂了机器人步态与越障之间的关系,且部分方法需要大量计算,系统实时性不高,无法应用于搜救场景。
本文为解决机器人运动质心波动较大的问题,进行机器人弧腿不同触地位置的最大越障高度计算、稳定性指标构建、机器人步态分析,进而得到机器人步态、障碍物高度与质心波动和能量损耗间的关系,从而完成步态设计。
1 越障模型及稳定性指标构建
1.1 越障模型构建
本文基于三段弧腿结构进行步态规划,机器人三弧腿结构参数如图1所示。每段弧腿所对应的弧度分别为θ1、θ2、θ3。

图1 搜救机器人三弧腿结构示意图
为进一步明确新型弧腿在运动中的表现,并为后续步态规划奠定理论基础,需要基于图1所示的搜救机器人的三弧腿结构进行机器人越障建模。
越障建模过程中忽视冲击和受力引起的材料变形,仅进行静力学分析。为简化分析,将受力模型简化为平面图;为方便理解,将障碍物模型简化为台阶。在此基础上,以单腿静力学滑动为极限状态计算机器人最大越障高度。在采用第一段弧腿越障时,全过程仅机器人第一段弧腿参与,所以三段弧腿模型可以简化为半圆弧腿,其受力分析示意图如图2所示。由静力学平衡公式可得

其中,μ为接触物体间摩擦系数。由公式(1)可得
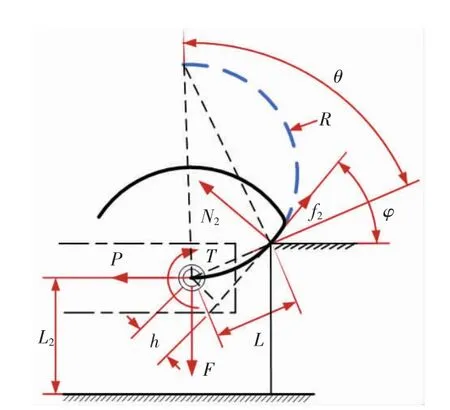
图2 第一段弧腿越障受力示意图

在实际应用中每一种环境即每一个摩擦系数中都对应一个最大的φ值。由图2中几何关系在该条件下可推导其最大越障高度H:

公式(3)经过推导换算可转化为公式(4):

机器人采用第三段弧腿平地运动遇到小障碍物时的受力情况如图3所示,假定机器人弧腿无质量,则静力学公式如公式(5)所示:

图3 第三段弧腿越障受力示意图

其中,G为机器人机身所受重力。同样以弧腿滑动极限计算机器人最大越障高度H2,可得

参考公式(6)可知,采用第三段弧腿越障时,机器人的最大越障高度H2为L2sin[arctan(μ)]。
1.2 稳定性指标构建
三足步态下,机器人在平地和斜坡上其接触点位置与转动中心连线垂直于接触面,则该机器人模型垂直投影在接触面上,效果如图4所示。机器人在平地或斜坡上的3个接触点所构成的区域投影在水平面上为ΔF1F2F3,三角形区域由转动关节间距L与机器人宽度W决定,质心与投影三边的垂直距离分别为S1、S2、S3。则该时刻的稳定裕度SSM为


图4 静态运动稳定性分析示意图
本文所设计的分段弧腿式机器人转动关节间距L为250 mm,机器人宽度W为260 mm,则SSM=S2=S3=(260/2)sin[arctan(250/2/260)]=56.33,表明三足步态稳定性较好。
2 步态设计
弧腿式机器人每个电动机均是独立驱动。当采用三足步态时,每组机器人弧腿的转速和相位相同。当采用速度曲线控制电动机时,机器人的步态规划随即转化为对机器人电动机转速曲线的优化。韩媛媛等[13]基于弹簧倒立摆模型得出Rhex时序控制曲线。冬雷等[1]基于弹簧倒立摆模型对步态进行优化,得到新的电动机正弦转速曲线。两位学者将电动机转速从2种单一速度转化为正弦曲线,但是正弦曲线相应参数的确定方法并没有阐明,本文拟研究满足越障需求,且质心波动较低、能量损耗较低的电动机双段正弦转速曲线。
分段弧腿式搜救机器人三足步态相位控制图如图5所示。机器人弧腿在一个运动周期内摆动一圈,摆动相和支撑相所用时间相等,但所占用的相位角度不同。机器人支撑相角度大大影响了六足弧腿机器人的运动速度、稳定性和受力情况,是六足弧腿机器人步态规划中的关键一环。基于该相位控制图,电动机转速ω表达式如下:

图5 三足步态相位控制图

其中,k为整数,T为步态周期,A1为摆动相的机器人转速曲线的系数,A2为支撑相的机器人转速曲线的系数,B为步态待调整参数,t为时间。假定摆动相角度为θ摆,支撑相角度为θ支。根据相位控制图,电动机转速ω应满足如下关系:

根据公式(8)可知,随着步态周期的增加,角速度减小,即单腿步态周期与角速度成反比关系。将公式(8)代入公式(10)可知,-A2+B=0。此外电动机转速曲线与支撑相角度θ支、摆动相角度θ摆还应满足如下关系:

由公式(11)和(12)可得

通过分析A1对驱动力的影响进一步辅助电动机控制曲线的筛选。假定负载、电动机、齿轮的转动惯量为J,则电动机输出的必须扭矩T必表达式如下:

其中,Ta为加速扭矩,T负为负载扭矩。由该公式可知,在T负一定的情况下,随着加速度增加,电动机的T必增加。为使机器人快速度过摆动相阶段,A1一般取最大值。A1最大值与电动机相应参数有关,假定减速器的传动比为i,则电动机驱动扭矩T驱满足如下公式:

结合公式(8)、(15)、(16)可得

由上述公式可知,电动机双段正弦转速曲线的确定仍需要确定弧腿的周期与支撑相角度。
根据机器人控制系统设计,机器人的运动控制是基于速度进行控制的,而机器人速度与步态支撑相角度成正比,与步态周期成反比。速度一定时,当两者一个参数确定后,另外一个参数也随之确定。而机器人运动呈现周期性,因此研究机器人步态与质心波动、能量损耗之间的关系只需研究一个步态周期内机器人的支撑相角度对其质心波动和能量损耗的影响。
由于特殊结构设计,机器人运动过程中存在一个最小支撑相角度。此外随着支撑相角度的增加,机器人的第二段和第一段弧腿逐渐参与运动,运动过程示意图如图6所示。

图6 运动过程示意图
由图6可知,随着支撑相角度的增加,图中虚线覆盖区域逐渐向左覆盖。在运动过程中机器人按照第一段、第二段和第三段弧腿的顺序触地,而触地位置与转动中心距离逐渐增加,在第三段弧腿触地运动时,距离达到最大值。
由此可知,当仅采用第三段弧腿运动时,机器人质心垂直波动标准差最低。总体标准差与单独弧腿触地时标准差之间的关系为

其中,S总为一个机器人运动一个周期的质心竖直波动标准差,S1、S2、S3分别为机器人单独采用第一段、第二段、第三段弧腿运动时质心波动的标准差,且S1、S2远大于S3;l1、l2、l3分别为一个步态周期内每段弧腿触地长度,l为弧腿一个步态周期内总体触地长度。由此可得支撑相角度的值越小,质心垂直波动的标准差越小,整体稳定性越高。
此外,机器人运动过程中第一段弧腿触地点与转动中心距离关系如下:

则机器人在该步态周期需要克服重力做功如下:

其中,m为机身质量,g为重力加速度,R3为第三段弧腿半径。
由公式(19)和(20)可知,随着支撑相角度增加,机器人质心垂直波动和能量损耗都在增加,因此应选择尽可能小的支撑相角度,但机器人运动还需要满足越障需求。
针对某一固定接触面,其摩擦系数是确定的,进而各段弧腿接触时的可翻越最大障碍物高度是确定的。假定预估障碍物高度为h,可得面对不同障碍物时机器人支撑相角度选择方法如下:
(1)当 0≤h≤L2sin[arctan(μ)]时,分段弧腿式搜救机器人可翻越障碍物,则θ支=θ3。
(2)当L2sin[arctan(μ)]<h≤L2时,分段弧腿式搜救机器人可跨过障碍物或滑动后跨过,则θ支=θ3。
(3)当L2<h≤L2+2Rcosθsin(θ+φ)时,分段弧腿式搜救机器人需要规划越障步态,则步态支撑相角度计算公式如下:

(4)当h>L2+2Rcosθsin(θ+φ)时,分段弧腿式搜救机器人无法越障,需要避开障碍物,防止机器人发生倾覆损伤机体。
至此,本文已完成分段弧腿式搜救机器人面对各种障碍物时的支撑相角度选择,电动机双段正弦曲线的参数除电动机转动周期外,都已根据电动机参数确定。而电动机转动周期与机器人步态周期相同。根据操作员对作业环境的观察或根据视频信号计算结果,可预估机器人所需速度,从而适时调整步态周期。
3 实验验证
为确保运动过程中弧腿结构不会出现意外,本文选取机器人三足步态第三段弧腿触地状态进行静应力分析。通过分析工况可知,机器人大部分运动过程是第三段弧腿着地,且受瞬间的地面支反力和摩擦力,因此,将第三段弧腿模型分为两半,将受力集中为半圆弧处的接触力。然后在ABAQUS软件中进行创建材料,设定杨氏模量、泊松比、截面属性,创建分析步等相应操作。最后可得静应力云图如图7所示。

图7 静应力云图
由图中红色部分应力数值和材料屈服强度可知,运动过程中机器人弧腿结构未发生塑性变形,能够正常运动。为验证所设计步态是否达到低质心波动、低能量损耗的设计目标,本文基于ADAMS软件进行机器人仿真实验。假定机器人采用三足步态平地运动,路上有高度为10 cm的障碍物,观察机器人运动过程中质心波动和能量损耗有无变化。结果如图8所示。

图8 优化前后机器人质心波动对比
由图可知,面对高度为10 cm的障碍物,优化后机器人在成功越障的同时,质心波动程度较未优化前有较大程度的降低,同时也意味着垂直方向能量损耗有较大降低,达到了步态设计的目标。
4 结语
为解决搜救机器人作业过程中质心波动大带来的伪差问题和能量损耗大带来的续航不足问题,本文首先进行机器人越障模型的构建,计算不同弧腿触地运动时的最大越障高度。然后进行了机器人步态的稳定性计算,给出机器人的稳定裕度。最后完成机器人电动机双段正弦转速曲线的建模,并分析机器人支撑相角度和机器人质心波动、能量损耗间的关系,进而在满足越障需求的情况下,确定机器人支撑相角度并完成步态设计。本研究实现了机器人根据速度要求和越障需求规划低质心波动、低能量损耗步态的目标。但还有一定不足,如本研究是基于刚体模型进行的分析,忽视了实际运动中冲击的影响。此外,步态规划过程中未考虑面对障碍物的多腿协调处理方案,配套的合理评价环境的算法也尚未开发,无法实现机器人自动判断环境并调整步态。
下一步工作主要有3个方面:(1)基于稳定性指标,针对运动过程中出现的异常情况调整步态设计,完成弧腿间步态协调方案的设计,进一步降低机器人运动过程中的质心波动;(2)根据视频信号,进行机器人最佳速度估算算法开发,实现机器人全自动步态规划;(3)进行越障动力学分析、碰撞动力学分析和材料应力分析,为提高机器人实际工作环境适应能力打下基础。
