一种基于机器视觉的并联机器人实训设备设计
2020-06-27徐伊岑曹小兵
徐伊岑 曹小兵
摘 要:随着制造业智能化的推进,机器视觉与机器人的结合越来越紧密,对相关专业的人才培养要求也越来越高。目前适用于高校教学的此类复合型设备较少,为此利用机器视觉系统、PLC、伺服电机、触摸屏等开发了一种基于机器视觉的并联机器人实训装置,编制了软件程序,设计了人机交互界面。该设备可根据预设的象棋排布方案自动抓取棋子并完成排布,具有趣味性与开放性特点。调试结果表明,设备运行稳定,达到了预定的功能要求,该设计思路可为类似设备的研制提供参考。
关键词:机器视觉;并联机器人;程序;人机交互
0 引言
机器人技术[1]、机器视觉技术[2-3]作为智能制造领域的两个关键技术,其应用越来越广泛,如何开发出相关的实训设备,以便在实际教学环节中有效地将这些技术传授给学生,是一个值得研究的问题。本文以“象棋排布”为创意,设计了一种基于机器视觉的并联机器人,利用X-sight机器视觉系统[4]获取给定的象棋信息,并驱动并联机器人按照设定的排布方案,完成棋子的抓取與排布。测试结果表明,该设备运行可靠,且涵盖并联机器人、触摸屏、机器视觉系统等诸多内容,满足人才培养的需要,其设计思路可为类似设备的研制提供参考。
1 硬件设计
1.1 机器视觉系统设计
机器视觉系统主要由智能相机、镜头、光源三部分构成。考虑相机的成像质量和系统的功能需求,本文选用30万像素的信捷SV4-30M型智能相机。该相机具有成熟的视觉算法库,编程时可直接调用已集成的算法,大大减轻编程难度和工作量,提高了工作效率。对于相机镜头的选择,应该注意焦距、目标高度、影响高度、放大倍数、影像至目标的距离、畸变等关键参数,本文选取SL-FK08F2M型号镜头,它的分辨率达200万像素,最小焦距为8 mm。光源作为系统成像部分的辅助器件,直接影响到成像质量,由于象棋图案为正面观察,本文选用SI-RI103000W型白色环形前照光源,同时选用SIC-242型光源控制器调节光源的亮度,保证在任何自然光照条件下均能获得较清晰的图像。
1.2 触摸屏选型
触摸屏作为人机界面的重要载体,硬件选型要求其在显示方面、控制方面和通信方面都能有较为出色的性能。本文选择了信捷TG 865型触摸屏,在显示方面,其色彩饱满,显示效果逼真,具备触控校准功能,存储容量大,可实现高速下载、加载和高速运行的功能;在控制方面,可以实现动态显示监控、实时报警、历史报警记录等控制功能,用户体验时可以参与在线模拟、离线模拟等操作;最主要的是其组态功能方面,借助强大的C语言函数块,使其在运算、命令、通信方面更加快捷。
1.3 PLC选型
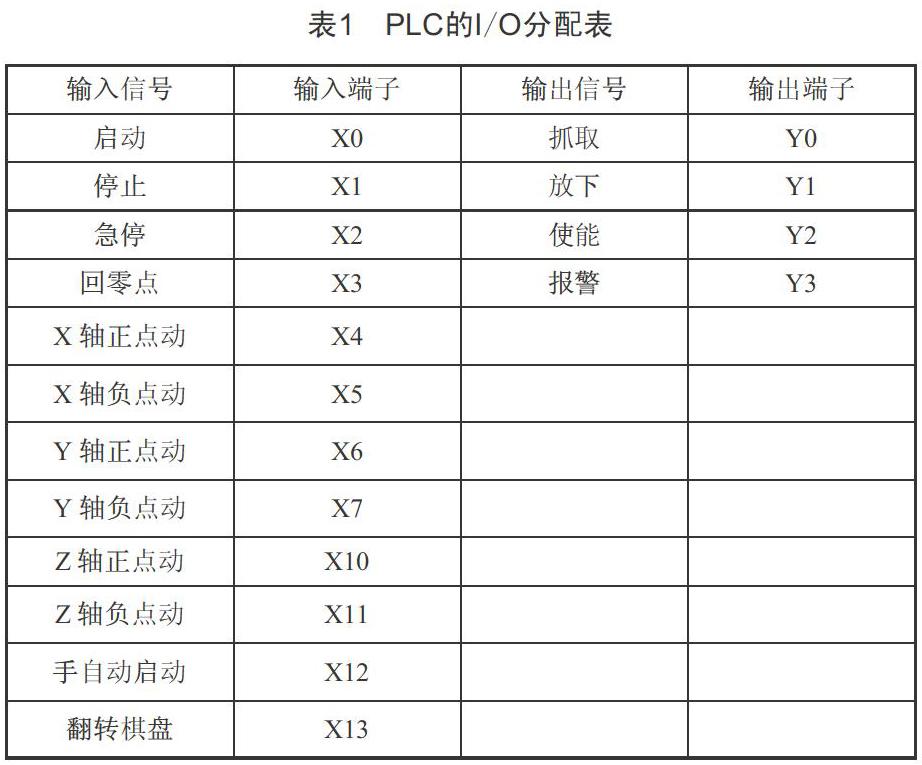
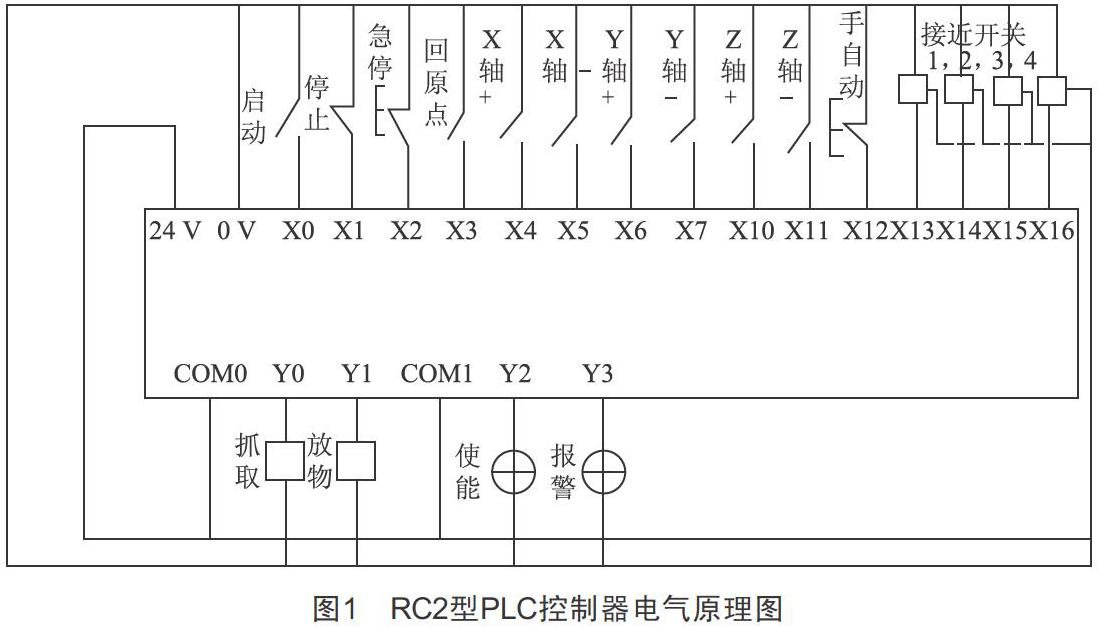
本文选用信捷RC2型PLC,具体的I/O分配如表1所示,控制器电气原理如图1所示。
1.4 并联机器人设计
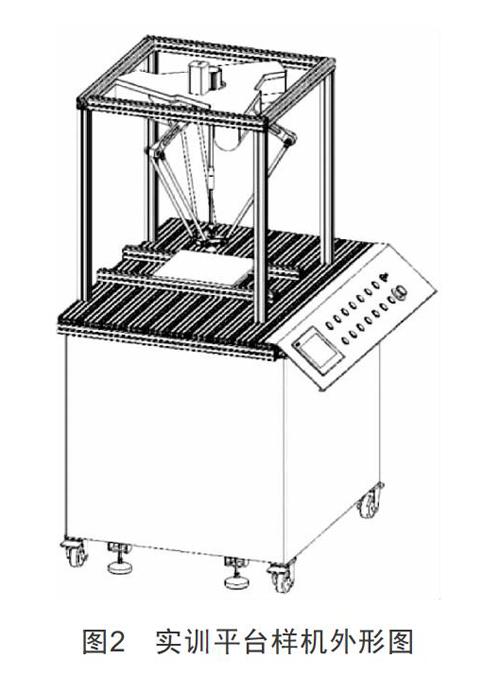
并联机器人实训平台样机外形如图2所示,在基板外缘呈三等分式向外部延伸出安装端,三个安装端下方分别安装有伺服电机一M1、伺服电机二M2、伺服电机三M3,每个伺服电机的下端均连接有驱动杆,驱动杆下端铰接有从动杆,基板的上端中部安装的伺服电机四M4下端垂直连接有旋转轴,旋转轴的下端设置有抓取中心,且从动杆的端部均与抓取中心连接。
2 通信系统设计
通信系统设计分为PLC与机器视觉系统、PLC与伺服系统、PLC与触摸屏三部分,用以实现硬件间的信息交互功能。
RC2型PLC和智能相机采用RS485通信,将光源控制器的A、B端口分别对应接到PLC上的A、B端口即可。
RC2型PLC与伺服驱动器之间采用RS485通信,在确认Modbus通信协议并对DS伺服进行设置后,最后一步就是DS伺服与PLC之间的接线问题,因为是四自由度的并联机器人,所以有四个伺服驱动器和伺服电机,跟相机与PLC通信接线相比,需要将四个伺服进行串联通信在一起。
TG865触摸屏与信捷RC2型PLC之间通过RS485实现信息通信,一般我们在新建工程时,在选项“设备/串口设备/下载口”中,可直接选取相应的PLC型号即可完成。
3 软件设计
软件设计主要包括三个部分:机器视觉系统程序设计、控制系统程序设计、人机交互界面设计。
3.1 机器视觉系统程序设计
机器视觉系统程序设计主要利用X-Sight Studio软件,针对智能相机进行程序编制,主要任务为给定棋子提取图案轮廓特征与脚本程序的编写。
编好脚本程序后,利用X-Sight Studio软件图案定位工具,将相机拍摄到的已知的七种不同类型的象棋提取其模板,并设定其待搜索区域图像的特征,再将特征进行匹配,从而计算出模板和对象之间的几何位姿关系。
在X-Sight中添加自定义工具,借助C语言编辑视觉脚本程序,脚本中需要给图案定位出来的特征结果定义名称,即定义出相、将、士、卒、車、炮和马,同时要求能够做到对各象棋棋子种类和数量的精确识别。
3.2 PLC程序设计
PLC程序包括两个部分:一是点动控制部分,要求设置点动PLC控制翻转棋盘、恢复棋盘、启动、急停以及XYZ正负向的点动运动方式,同时在急停状态下,无法启动使能控制按钮;二是自动运行部分,即在PLC自动控制过程中,经通信获取棋子等信息后,首先机械臂回零,然后依次按照机械臂运动抓取、摆放的流程运行即可,在整个运行过程中实时监控,当出现错误时能及时报警发出警告。
3.3 人机交互界面设计
为便于操作者监控设备运行状态并设定运行参数,本文设计了人机交互界面,主要包括主界面和用户窗口界面两个部分,用户窗口界面中包括操作界面和参数设置界面。图3为参数设置界面,界面内容覆盖象棋定位机械手所需的运动参数、点动转换以及零点坐标值的记录和设定等。
4 测试与分析
首先利用TW组态编辑的象棋排布界面,人机面板上的象棋种类有将、象、士、马、車、炮和卒,且各棋子可移动数量只有一枚,通过手指触摸移动棋盒里的象棋到棋盘上的点处,如图4所示。
PLC通过操作面板发来的排布方案,筛选出最终所要移动的棋子,包括数目和类别信息,同时提取象棋面板上排布的位置信息,然后对于由相机通信传输过来的随机给定棋子信息,依次筛选出所需要移动棋子在实物棋盒中的信息(包括象棋类别、数目和相机坐标系下的坐标位置)。信捷RC2型PLC中因为本身有携带负责相机坐标与机械臂所处机械坐标转换的算法,故而在信息筛选并参与本身的算法运算之后,可以得到基于机械臂所处机械坐标系下棋子的位置信息,然后发出指令使得PLC程序执行,PLC把执行程序的操作指令传给伺服驱动器,伺服驱动器驱动伺服电机,带动机械臂按操作顺序,从棋盒里抓取棋子然后放置在棋盘上,执行完毕,机械臂端点回零,棋盘执行翻转,然后数据信息清除,设备自行还原,等待新的人机界面操作内容。图5为最终自动执行完的象棋排布结果,可以看出并联机器人成功按照给定的布局图案完成了实际棋子的排布,验证了设计的正确性。
5 结语
本文以一种基于机器视觉的并联机器人实训平台为研究对象,根据控制要求,采用模块化設计,完成了样机制作,编写了软件程序,并设计了人机交互界面。测试结果表明,设备运行正常,满足了预定设计要求。该设备集机器视觉系统、PLC、HMI、电机、传感器等于一体,具有较强的趣味性,既可用于单独课程的教学,亦可作为学生综合项目训练时使用。文中的设计思路与实现方法对于类似机器人的研制具有一定的参考意义。
[参考文献]
[1] 蔡自兴.机器人学基础[M].北京:机械工业出版社,2009.
[2] 余文勇,石绘.机器视觉自动检测技术[M].北京:化学工业出版社,2013.
[3] 王耀南,陈铁健,贺振东,等.智能制造装备视觉检测控制方法综述[J].控制理论与应用,2015,32(3):273-286.
[4] 周晴.基于几何基元的实时匹配与定位技术的研究与开发[D].无锡:江南大学,2014.
收稿日期:2019-12-19
作者简介:徐伊岑(1982—),女,湖南长沙人,硕士研究生,讲师,研究方向:机电一体化技术、机器人技术。
