管幕-箱涵法隧道穿越软土地层沉降控制技术研究
2020-06-27刘金龙
刘金龙
(上海建工集团股份有限公司 上海 200080)
0 绪论
随着我国基础设施建设以及城市交通系统建设的不断深入,在地下工程施工中,对沉降的控制,对精度的要求、对环境的影响,对风险的控制等都提出了更高更严格的要求。对于上海这个国际大都市而言,研究适合软土介质的城市隧道或地下通道施工方法是对地下工程建设安全、经济、有效、快速的有力保障[1-2]。
1 工程概况
1.1 地道基本概况
田林路下穿中环线地道(中环线交通节点改善工程)新建工程位于徐汇区漕河泾开发区中部,是田林路上重要的交通节点,西起古美路,东至桂平路,并下穿中环线,全长约1032.78m,工程地理位置如图1所示。

图1 田林路地道工程地理位置
田林路下穿中环线地道两端为敞开段与暗埋段,采用明挖法施工。穿越中环线段采用管幕-箱涵法施工,始末里程桩号为K0+663~K0+749,穿越长度86m。穿越段地道断面布置为双向3快2慢,箱涵断面长度19.8m,高度6.4m。
1.2 工程地质
根据详勘阶段地质勘查报告,场地主要由饱和粘性土、粉性土、砂土组成,一般具有成层分布特点。上排钢管幕处在③号淤泥质粉质粘土,两侧和底排钢管幕多处于④号淤泥质粘土。中环线路面结构层厚度1.1m,主要为:5cm厚沥青层;12.5cm厚中粒混凝土层;36.5cm厚粗粒混凝土层;36cm厚混凝土层以及20cm厚砾石层,砾石大小约6cm×7cm。中环线路面下部有2.2m厚素填土层。
2 钢管幕顶进施工
2.1 顶进时姿态控制
钢管顶进时,需要对累计偏差进行严格控制,在累积偏差较大的情况下,如果未能及时采取有效的纠偏措施,会造成钢管幕无法根据设计要求顶进至正确位置。在比较严重的情况下会造成钢管锁口撕裂的问题,对于管幕密封性产生很大不利影响。因此,钢管幕顶进精度控制是工程成败的一个关键因素[3-4]。
(1)确保导轨的制作及安装精度,要求导轨四角的高程和轴线误差小于3mm。
(2)增加洞口限位装置,钢管和机头进入洞口后,使钢管与导轨密贴,钢管位置精度可靠保证,如图2所示。
(3)采用专用的泥水平衡顶管机施工保持开挖面稳定,并采用计算机轨迹控制软件指导施工。
(4)利用激光反射纠偏系统、倾斜仪传感器和纠偏油缸行程仪传感器等,在顶进过程中有效提高掘进机的顶进精度。
(5)应用网络监控平台开展监测,实时收集管幕钢管顶进时的轴线偏差和扭转数据,保证钢管穿越中环线过程中连续施工监测及姿态可视化,确保及时纠偏,及时调整钢管姿态。
(6)采用精细化施工,加强施工过程控制,根据顶进过程中各项施工区域以及各项施工参数数据,实时纠偏。
通过上述措施,保证钢管顶进轴线偏差在±3cm之内,扭转偏差在±3°之内。
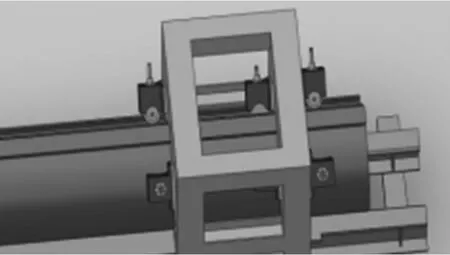
图2 洞口限位装置
2.2 顶进时沉降控制
(1)采用适用于③号及④号地层的泥水平衡钢管幕专用顶管机。它采用改进激光显示及纠偏系统,操作人员实时纠偏,实现高精度的姿态控制,钢管顶进纠偏幅度较一般顶管要小得多。
(2)精细化的开挖面稳定管理。除了采用变频自动控制进排泥量,机头水土压力自动平衡系统保证开挖面稳定外,还可严格根据监测结果,人工调节进排泥流量,控制泥水仓压力。
(3)针对性施工参数控制。为了有效地控制钢管幕顶进时,同时,在重要管线影响区域降低顶进速度、加强管线监测、及时调整施工参数。
(4)特种触变泥浆。管幕钢管顶进时,采用特种触变泥浆作为润滑材料注入到顶进管道与周边土层之间的环状空间中,泥浆不仅具有支撑土体的作用,同时,大大减少了钢管锁口对土体的扰动。
3 箱涵推进施工
大断面箱涵推进施工时,中环线地面交通不封闭,对地表和地下管线的沉降变形控制要求非常高,主要采用7大措施,如图3所示。

图3 大断面箱涵穿越中环线沉降控制措施
3.1 箱涵推进姿态控制
箱涵推进过程中,由于掘进机自身没有纠偏能力,主要靠箱涵后部80只液压油缸来进行左右姿态纠偏。箱涵推进施工时,应用了包含7组液压油缸的同步推进控制系统,并采取了各自独立的液压泵站,分别对每组液压缸进行驱动控制。在箱涵的左侧和右侧,分别设置2台激光测距仪,用于获得箱涵行程差作为控制基准,计算调整各泵站变频器输出频率,实现箱涵推进自动同步控制。
除此之外,还将导向墩布置于工作井内箱涵两侧。主要作用在于能够在箱涵始发阶段,有效控制其推进始发过程中的中心偏差现象。
3.2 箱涵推进开挖面稳定管理
箱涵掘进机为土压平衡式,并具备PLC可编程序计算器。通过开挖面的土压力计,能够以自动或手动两种方式,针对顶进速度、螺旋输送机转速进行合理调整,使得开挖面土压力能够保持较为稳定的状态,在此基础上确保正面水土压力的平衡。
掘进机土压传感器对于维持开挖面稳定具有关键作用,其中在土舱内总共包含14处土压传感器,其中顶部与底部分别设置4处,而中间位置设置6处。土压传感器主要用于监测正面土体压力,从而平衡开挖面。
箱涵掘进机正常掘进速度为2-4cm/min,在进行推进施工时,如果土仓当中的某一部分局部土压存在下降趋势,同时下降的数值较小,此时系统能够对螺旋机出土量做出自动调节,使得螺旋机内土压提高,从而能够发挥对土仓内部土压的调整作用,使其能够继续保持平衡状态。而针对于土舱内土体压力过大的情况,此时需要对螺旋机排土量进行提高。当出现整体土仓压力变化时,系统根据压力变化值,螺旋机调整出土速度,保持土仓内压力平衡。
根据地道埋深及土体容重,正常推进时可保持前舱土压0.18~0.2MPa。在此状态下,是不考虑钢管幕的截断作用,因此,正常推进情况下为轻微状态下的闷顶,这对地下管线及中环线路面沉降控制是非常有利的。
3.3 箱涵推进外周AB触变泥浆
箱涵推进过程中,拟就建立同步注浆(A浆)与补充注浆(B浆)分为两个独立的注浆系统,在浆液的配比、注浆设备的选择、注浆控制要点等方面,A浆与B浆存在一定的差异。并且A浆与B浆的性能也有所区别,其中同步注浆(A浆)以管幕支撑好、保水性好为主,补充注浆(B浆)以润滑减摩为主。
同步注浆(A浆)系统,与掘进机一起控制,在掘进机操作室内实现远程自动控制。当掘进机开始推进时,同步注浆系统亦同时开启。注浆浆液采用膨润土含量较高,流动性相对较差,保水和支撑性较好的厚浆。
补充注浆系统(B浆),则设置补充注浆控制台,在由专人另外控制。补充注浆的开启和注浆位置则根据推力大小、箱涵顶部预埋泥浆压力盒、沉降监测等共同控制。补充注浆系统采用膨润土含量较低的稀浆,流动性相对较好,保水和支撑性较差的稀浆。
3.4 箱涵首节试推
首节箱涵长度仅为13.5m,此时箱涵掘进机切口未至中环线,仅在中环线西侧辅道下。因此,首节箱涵作为试推段,根据监测数据及时反馈信息,为后续地道穿越中环线,从理论和经验上选取各项施工参数,对施工及时加以调整是非常必要的。
箱涵推进过程中,对密封仓土压力、刀盘转速及压力,推进速度,千斤顶推力,注浆压力及注浆量等,分别采用几组不同施工参数进行试掘进。在确定施工参数时,需要结合相关的测量数据以及地表沉降情况,以此指导全过程施工,但应以符合地表沉降标准、管线沉降变形、掘进机姿态控制等要求为准则。

图4 首节箱涵试推
3.5 箱涵外周泥浆固化
在顶进施工结束后,应对箱涵与管幕中的泥浆进行泥浆置换工作。置换泥浆配置上,应采用水泥与占比30%的粉煤灰作为原料。在箱涵周围形成水泥浆套承担上部荷载。箱涵四周每隔6m有一道注浆断面,水泥浆仍采用该注浆孔,由注浆压力和注入量控制地表变形,使地面的隆起控制在3cm以内,待水泥浆凝固后,相当于每隔6m即形成一道横向支撑梁,即使梁之间有部分泥浆未固化,由于管幕作用,可以把荷载传递至箱涵而不至于引起较大的工后沉降。
4 结论
管幕-箱涵工法在软土地层中具有较为广阔的应用前景,尤其在密集的城市空间,对沉降要求、周围环境要求等非常高的前提下,对施工精度、工艺改善和施工管理提出了新的要求,这就需要进一步优化和提供施工工艺和管理水平。结合田林路下穿中环线地道新建工程,对其中的几个关键问题和技术措施进行了阐述和总结。
(1)钢管幕的精确施工是管幕-箱涵工法成败的重要一环,其顶进时的姿态控制又尤为重要,采用导轨搭设控制、洞口限位装置、专用泥水顶管机、高精度激光纠偏系统、信息化网络实时监测平台、精细化施工等多项措施保证钢管幕施工精度。
(2)箱涵在钢管幕内推进,间隙较小,对姿态控制要求非常高,主要采用同步推进控制系统,精确控制箱涵水平姿态,实现箱涵推进自动同步控制。
(3)为了实现大断面箱涵推进,地面及地下管线的沉降变形控制,主要采用合理的开挖面稳定管理措施和箱涵外周泥浆系统,其中同步注浆应以管幕支撑好、保水性好为主。
(4)封闭式箱涵掘进机断面较大,又由多个螺旋机出土,应更加注意螺旋机出土之间的相互协调以及施工参数的合理选择与控制。
