隧道巡检机器人通信系统设计
2020-06-22闫诗玥郭阳宽
闫诗玥 郭阳宽

摘要:针对隧道巡检机器人巡检过程中环境密闭、强磁干扰、长距离传输、信号延迟、通信不稳定等问题设计了隧道巡检机器人通信系统,分别从网络通信及内部通信两方面设计了基于Labview的软件控制的网桥通信、以太网络通信与串口通信结合的隧道巡检机器人通信系统。有效解决了隧道巡检环境干扰问题,使通信更加快速,信号更加稳定,保障了隧道巡检机器人巡检过程信息交互的稳定与可靠。
关键词:隧道巡检机器人;通信系统;网络通信
中图分类号:TP242 文献标识码:A 文章编号:1007-9416(2020)04-0000-00
0 引言
随着经济的发展,电缆发生故障引发的事故的几率也在相应地增加,为了保障电力电缆在地下隧道内的稳定安全运行,隧道巡检机器人孕育而生[2]。隧道巡检机器人具有可长时间不间断工作,保证了巡检过程中的实时可靠性,复杂环境中适用性等。隧道巡检机器人在进行巡检时需要与外界搭建可靠的通信,由于隧道区域空间狭小,存在拐角和岔口,加上内部有大量的电力电缆,构成了一种闭域空间环境,这些都将给隧道巡检机器人的通信带来严重困难,因此有必要对隧道巡检机器人的通信系统进行设计[1]。
1 通信系统整体设计
通信系统分为网络通信和内部通信,其中网络通信为了避免因直角弯产生的信号延迟等问题,主要由两个部分组成分别为有线、无线传输[3]。有线传输部分与信号中继相连接,被放入井下的隧道巡检机器人携带中继模块。其中中继模块通过网桥无线发射和接受相应指令;内部通信即本体携带的控制单元与驱动器、传感器等装置的信号通信。
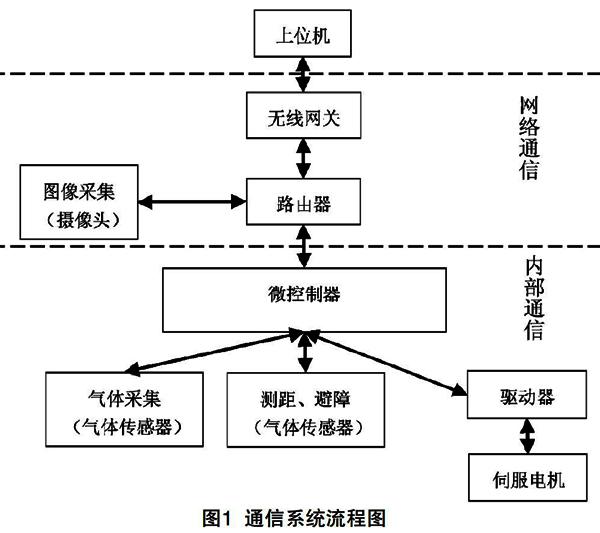
由于隧道巡检系统的硬件结构可分为三层:上层-上位机、中层-微控制器、下层-用于执行的驱动单元和用于反馈的采集单元。因此隧道巡检机器人的通信系统流程图如图1所示,上层上位机与中层微控制器通过网络通信完成指令的传输及相应处理;中层微控制器与下层单元选用串口通信方式完成信息交互[4]。
2 网络通信设计
通信系统中运用网络通信传输者着上层上位机和中层微控制器之间的指令,同时负责与机器人所携带的摄像头之间的画面反馈工作。因为隧道空间密闭同时存在强磁干扰,所以需要传输距离较长并且稳定的信号传输,为稳定完成通信任务,实现较长距离信号传输,为实现对机器人动作位置调整和实时监控等功能,设计了以网桥为中继的网络通信模式[6]。
网桥可以在较长的距离上正常工作,其主要在数据链路层工作,连接LAN的方法是不同的MAC地址發送帧[5]。由于考虑到在网络通信的过程中会有障碍物出现的可能,为降低对信号的影响将中继单元(网桥)放置在隧道内,与上位机的连接由于不需要移动所以选用了有线传输更加稳定。传输网桥有2.4G和5.8G两种型号传输方式,由于5.8G传输距离长、传输速率块、传输稳定等优势选用5.8G网桥进行信号传输。
上位机和微控制器及上位机和摄像头之间为单独通信,因为与上位机间的通信都需要通过双绞线形式进行连接并且在于机器人内部,并且稳定性能要求高,所以选择国电龙源电气路由器搭建网络,即能接入控制器进行指令传输,也能连接摄像头增加控制灵活性。具体参数如表1所示。
3串口通信设计
中层的微控制器与下层的电机及三个驱动器之间的信号通信采用的是串口通信模式,因为RS232应用简便、成本较低、通信质量稳定、应用领域广泛等特点所以设计选用了RS232串口协议通信方式。
RS232串行接口主要用于完成中层微控制器与下层部分模块之间的通信,选用的中层的微控制器与下层的驱动器上均有可以用于进行RS232通信的DB9串行接口。组网时应在发送线与地线之间连接一个10kΩ的电阻,为保障工作电路和驱动器的安全。通过对三个驱动器的组网方法就可以实现机器人各个电机之间的联动控制,实现灵活操作控制。
4 结论
本文完成了基于Labview的软件控制的5.8GHz的外部网桥通信、以太网络通讯与RS232串口通信结合的隧道巡检机器人巡检系统的通信系统设计。此通信系统可以保证网络传输的快速可靠,有效降低隧道内的强磁干扰。
参考文献
[1] 姜芸,付庄.一种小型电缆隧道检测机器人设计[J].华东电力,2009,37(1):95-97.
[2]李忠友,刘元雪,陈小良,等.隧道火灾研究现状与展望[J].地下空间与工程学报,2010,06(a02):1755-1760.
[3] Noda S, Ueda K. Fire detection in tunnels using an image processing method[C].Vehicle Navigation and Information Systems Conference, 1994. Proceedings. IEEE,1994:57-62.
[4] 谢振宇.电缆隧道综合检测机器人控制系统研究[D].上海交通大学,2008.2
[5]赵亮,冯林,吴振宇,等.基于FPGA的小型机器人无线通信系统[J].计算机工程,2010,36(13):251-253.
[6] 李向东,厉秉强.基于巡检机器人的通信控制系统设计与分析[J].山东电力技术,2005(6):3-7.
收稿日期:2020-03-10
作者简介:闫诗玥(1995—),女,北京人,硕士研究生,研究方向:仪器仪表工程。
Design of Communication System for Tunnel Inspection Robot
YAN Shi-yue1, GUO Yang-kuan2
(1.GUODIAN LONGYUAN ELECTRICAL CO., LTD.,Beijing 100039;
2.Beijing Information Science and Technology University, School of Instrument Science and opto Electronics Engineering, Beijing 100192)
Abstract: Aiming at the problems such as environmental confinement, strong magnetic interference, long-distance transmission, signal delay, and unstable communication during the inspection process of the tunnel inspection robot, the tunnel inspection robot communication system was designed. From the aspects of network communication and internal communication, a bridge communication and a tunnel inspection robot communication system combining Ethernet communication and serial communication are designed. This design effectively solves the problem of environmental interference in tunnel inspection, makes communication faster, and signals are more stable, ensuring the stability and reliability of information interaction during the inspection process of the tunnel inspection robot.
Keywords:Tunnel Inspection Robot;Communication System;aspects of network communication
