基于Atmega168PA-AU的消防飞行器控制系统设计
2020-06-22周雨峰唐龙胡远望
周雨峰 唐龙 胡远望

摘 要:文章设计了一款基于Atmega168PA-AU单片机消防飞行器控制系统,用于无人机进行消防侦察和救援。系统采用Atmega168PA-AU芯片和陀螺仪MURATENC-03RC芯片作为飞行控制器,通过2.4G无线和蓝牙模块进行无线通信获取实时图像,使用四个电子调速器,实现无刷电机调速。测试表明,无人机能按照预先设定的轨迹平稳飞行,飞行器动态性能良好,接受图像信号清晰,使得技术人员能根据相关信息制定相应火灾救援措施。
关键词:单片机;消防;救援;飞行器
中图分类号:TP273 文献标志码:A 文章编号:2095-2945(2020)18-0036-02
Abstract: In this paper, a fire control aircraft control system based on Atmega168PA-AU single chip microcomputer is designed, which is used for fire reconnaissance and rescue of UAV. The system uses Atmega168PA-AU chip and gyroscope MURATENC-03RC chip as flight controller, obtains real-time image through 2.4G wireless and Bluetooth module wireless communication, and uses four electronic governors to realize brushless motor speed regulation. The test shows that the UAV can fly smoothly according to the pre-set trajectory, the dynamic performance of the aircraft is good, and the image signal is clear, so that the technicians can formulate the corresponding fire rescue measures according to the relevant information.
Keywords: single chip microcomputer; fire fighting; rescue; aircraft
引言
近些年火灾安全问题日益严重,2019年的四川凉山森林火灾事件让30名消防员失去了生命,澳大利亚的林火造成至少24人死亡、5亿只动物丧生,数百栋民居和数千公顷土地被毁。如采用无人机作为消防救援型飞行器可以识别林场中的火苗、识别受困人群,还可以快速前往投放物资施救,或能减少人员牺牲和财产损失。无人机可以分为:伞翼、旋翼、固定翼无人机。本文选用常见的四旋翼无人机进行设计。
1 总体设计
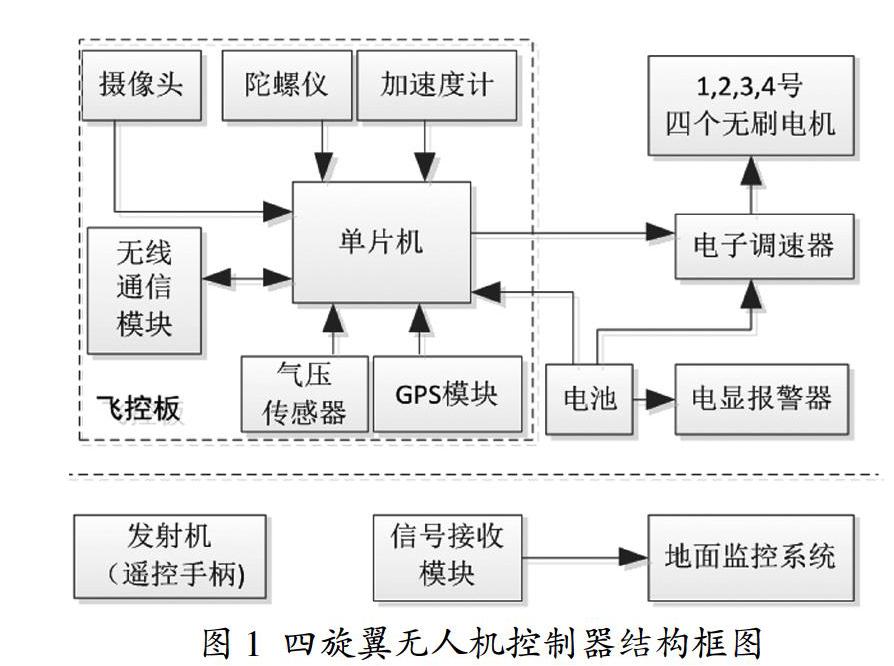
本设计中的无人机用于森林消防的侦察和救援,因此要对火灾发生位置进行航空摄像,并能对受困人员投递一些质量较小的物品等。整个无人机的电子装置分为地面和机载两大部分:地面设备包括发射机、信号接收模块和地面监控系统;机载模块包括单片机、陀螺仪、加速度计、气压传感器、GPS模块、摄像头、无线通信模块、电子调速器、电机以及电池和电显报警器。系统的总体设计方案如图1所示。
2 硬件设计
2.1 飞行控制器
飞行控制器是系统的核心模块,它用来读取传感器数据,检测并控制飞行器的飞行姿态,并通过无线通信模块使飞行器和地面发射机进行通讯,还可以控制摄像镜头视角变化等。系统的飞行控制器,采用了高性能、低功耗的8位AVR微处理器单片机Atmega168PA-AU芯片和陀螺仪MURATENC-03RC芯片。
Atmega168PA-AU芯片和三个MURATENC-03RC传感器都集成在飞控板上。这样避免导线的连接也减少外部的干扰。飞行控制器采用6组输出通道,为了用于不同的环境,体现了灵活性。并采用6针ISP下载器接口,它的优点是方便简单,而且减少板子的复杂程度,飞行控制器采用SMD贴片工艺,它最大的特点是可以缩小飞行控制器的面积、体积,使得飞行器美观,整体重量也减小。
用三个电位器改接三个陀螺仪的感度(一般情况不需要调节)。利用飞行器上三轴陀螺仪(角速度数据)进行积分,得到三轴角度,再使用调速度计的数据(三轴重力)对陀螺仪积分进行校准就得到较为可靠地三轴角度值了,也就是无人机的姿态感知。
传感器模块包括:气压传感器,GPS模块。MCU与这些传感器之间采用了SPI串口通信。据研究大气气压与海拔高度存在一定函数关系,根据当前气压即可求出当前海拔高度。因此可以用测量气压方式判断无人机的飞行高度,MCU将读取气压值经过运算后可以解析出飞行器的海拔高度。GPS模块用于测量无人机的地理位置。MCU读取GPS模块接收到的方位信息,并将其经过转换,从而解析出飞行器的方向、经度、纬度等。
2.2 无线通信模块
本系统采用了两个无线模块,分别是蓝牙(Blue tooth)模塊、2.4G无线模块。其中蓝牙模块用于传输飞行器的环境信息和监测信息;2.4G无线模块用于飞行器和地面监控平台之间的通信,采集飞行器的飞行轨迹和姿态。
2.3 电子调速器
本系统采用了四个电子调速器,为了给无刷电机调速。电子调速器又称“电调”当电子调速器接受不同的控制信号时,它就会输出不同的功率给无刷电机,从而改变无刷电机的转速。一个无刷电机配一个电子调速器。它的一端接飞行控制器,一端接无刷电机。
2.4 电源模块
飞行器采用规格为3S1P/11.1V/2200mah/25C的Li-Po聚合物锂离子电池。由于飞行器需要重量轻,功率大的电源的原因,它由3个单元的锂电池组合而成,锂电池每个单元的电压3.7V左右。锂电池可以提供11.1V的电压,它的最大放电电流可以达到50A。它能为四轴飞行器持续提供长达15分钟的动力。
2.5 电显报警器模块
电显报警器用来显示锂电池的电压,并兼有低电压报警功能。当锂电池放电到一定电压时(锂电池的电量不能完全用光,否者电池就算报废了),电显报警器发出警报,四轴飞行器及时降落,防止飞行器不会因断电从天空摔落下损坏。
2.6 发射机
采用-天地飞6通道的发射机(遥控器),为了飞行器向左、向右及各个方向飞行。主要用于控制飞行器的飞行。它能控制直线距离大于700米的飞行器。发射机采用FLASPEED原生2.4G技术。直接高速总线驱动,避免中间延时,极大提高了操控敏捷。而且它基于DSSS扩频技术的高端“扩频+跳频”通信系统,超高干扰性,可进行60台2.4G系统同时工作而互不干扰。
3 软件设计
按照系统设计要求飞行器,将系统的软件设计分成以下模块,包括发射机控制模块、无线发送模块、无线接收模块、飞行控制模块、视频信号接收模块。系统主要是根据发射机(遥控器)发送指令控制飞行器飞行的姿态。当系统上电后,首先进行无线模块初始化,然后控制摇杆复位,系统读取摇杆的电位,并根据摇杆电位计算控制摇杆的偏移量,经过通讯协议编码,经无线通信芯片发送至飞行器。然后系统读取飞行器的飞行参数包括飞行器的速度、高度和空间位置,解析飞行器的姿态,同时飞行器读取无线通信芯片传输过来的数据,调整飞行姿态,包括起飞、悬停降落、前进、后退、翻转等,然后读取摄像头的视频信号,并将视频信号叠加飞行参数发送至地面监控系统。最后判断是否自动驾驶,如是则根据气压传感器,GPS传感器的参数自动调整飞行姿态;如否则根据控制摇杆的信号调整飞行姿态。系统软件设计流程图如图2所示。
4 测试与验证
在设计并制作飞行器后对其进行详细的测试。首先飞行轨迹测试中,飞行器能按照地面发射机的摇杆控制进行起飞、悬停降落、前进、后退、翻转,飞行姿态平稳,飞行器的响应时间小于1秒,响应实时性较好,并且地面接受的图像信号清晰,能够携带质量较轻的小物品,基本满足设计要求。
5 结束语
本文设计了基于单片机的消防飞行器的硬件电路和软件系统,经过测试实行可以高难度的飞行姿态,具有较强的爬升能力,能采集视频图像,而且稳定性能很好。尽管飞行器采用了大容量的锂电池,但是飞行器的负载大,导致续航时间不是很长。下一步可以通过更换更大的锂电池或者减少一些不必要的负载。让飞行器能持久的续航,将使其真正走向实际应用。
参考文献:
[1]钱昊,许森,陈友荣.基于STM32F103的四旋翼无人机控制器设计[J].浙江树人大学学报,2016(4):6-10.
[2]郭楊,翁新武.基于AVR单片机的UAV飞行控制系统[J].长春工业大学学报(自然科学版),2013(2):228-235.
[3]徐超.浅议无人机在消防灭火救援行动中的应用[J].无线互联科技,2016(8):141-142.
