O2O背景下苏宁无人配送路径优化问题研究
2020-06-21王雅琪贾旭飞李雪琳
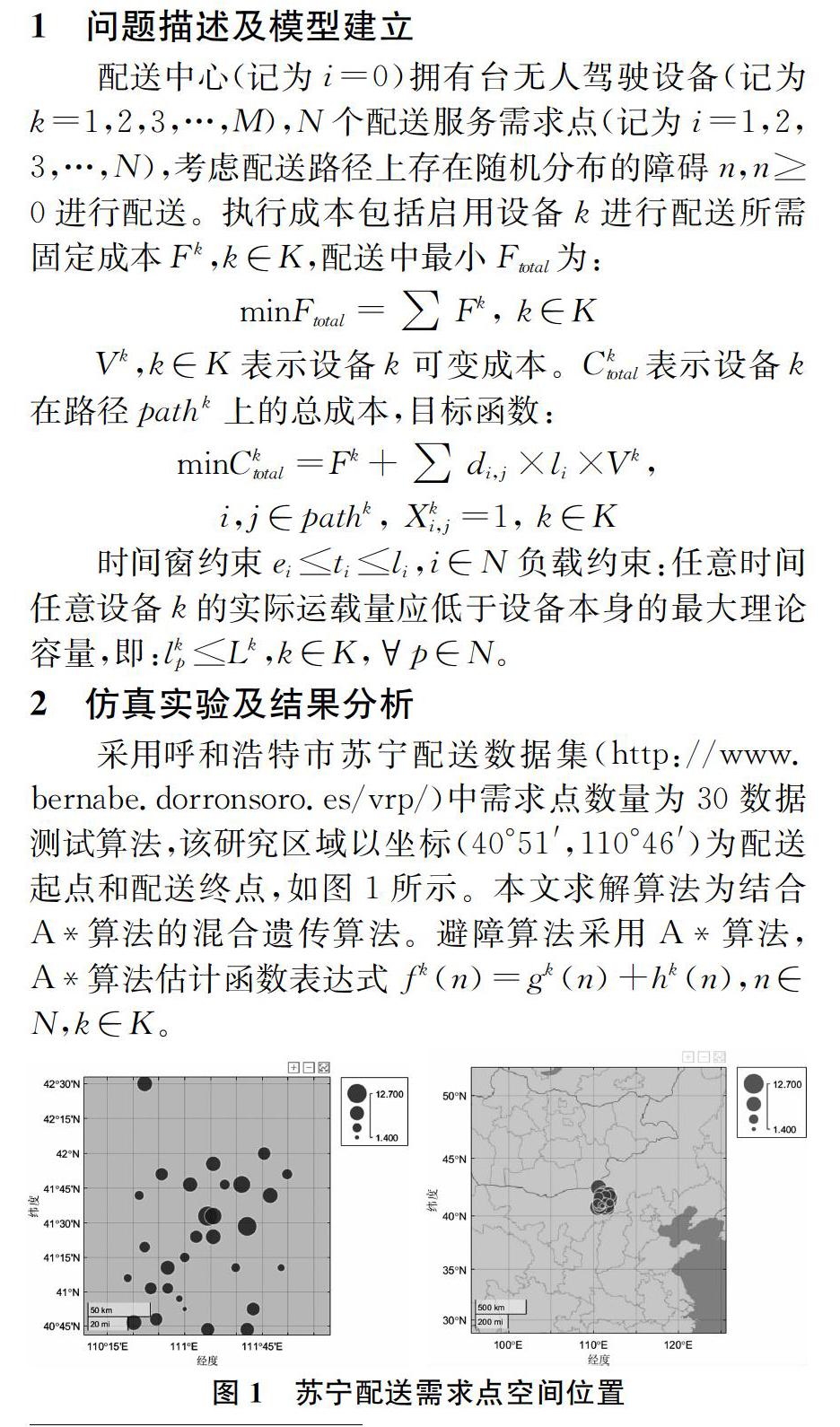
王雅琪 贾旭飞 李雪琳
摘 要:针对O2O背景下苏宁无人配送路径优化问题,研究提出在经典VRP问题中引入无人设备避障问题,并建立考虑时间窗约束、设备负载约束的成本最优规划模型。为求解模型,采用A*算法设计研究无人驾驶设备的避障问题,研究设计出遗传算法。基于苏宁配送,本文研究了在不同障碍物数量水平下的配送优化问题。
关键词:无人驾驶避障配送;路径优化;A*算法;遗传算法
中图分类号:F25
文献标识码:Adoi:10.19311/j.cnki.1672-3198.2020.19.008
0 引言
目前各种形式的无人驾驶配送已经成为苏宁公司研究的热点。为满足消费者对配送速度及安全性的需求,开发人工智能配送物流设备必然成为未来发展的趋势。自1959年Dantzig、Ramser提出车辆路径问题(VRP)以来,物流优化问题成为国内外学者的重要研究方向之一。無人驾驶配送在传统VRP的基础上进行深入研究。
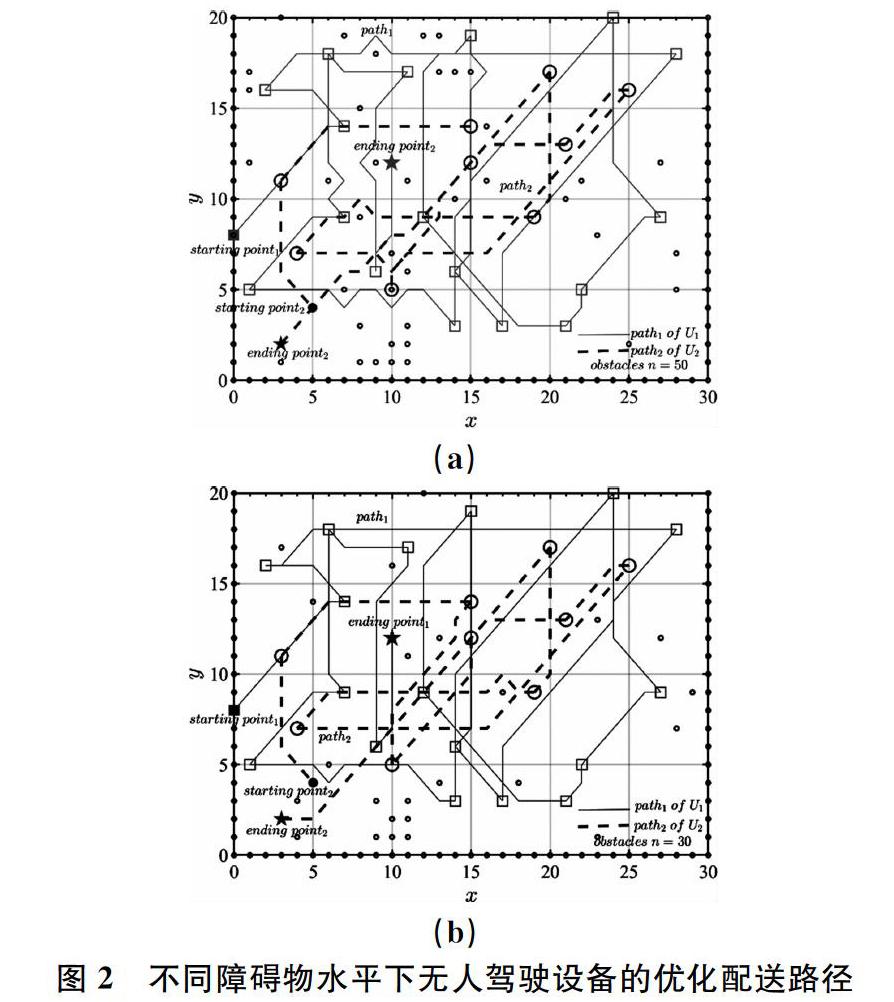
分别设置障碍物水平n=10,n=30。在不同障碍物水平下无人驾驶设备优化配送路径如图2所示。平均服务成本分别为121.56与116.01。仿真结果可得:不同障碍物水平下谁被的选择及路径的规划差距较小,平均单位服务成本n=10最小,在n=10,30时随着障碍物水平的提高,平均服务成本降低。
3 结论
本文首次采用A*算法将无人驾驶设备的避障路径规划问题应用于物流配送中,建立多目标优化模型;基于呼和浩特苏宁数据,应用遗传算法得到了无人驾驶设备避障路径规划的最优解,得到了不同障碍物水平下的优化配送路径及设备选择结果。
参考文献
[1]A. Tsourdos, B. White, M. Shanmugavel. Cooperative path planning of unmanned aerial vehicles[M]. John Wiley & Sons,2010.
[2]G. B. Dantzig, J. H. Ramser. The truck dispatching problem[J]. Management Science,1959,(6):80-91.