电极分布对织物触摸垫电容及触控信号的影响
2020-06-19甘行杨旭东董洪强胡吉永
甘行 杨旭东 董洪强 胡吉永

摘要:为优化投射式电容织物触摸垫结构,以得到优异的触控性能,针对条形电极形式,以触摸前后电容的相对变化率表示触控信号,运用仿真和实验验证相结合的方法研究不同电极宽度与不同电极间间隙对投射式电容织物触摸垫初始电容及分布的影响。结果表明,电极宽度和电极间间隙的增加使触摸垫驱动电极和感应电极间的初始电容增加,但电极宽度影响更为显著,并且触摸垫电极间的互电容呈边缘小中间大的分布状态。在电极导电率为61.6x106S/m.电极宽度约为2mm-3mm,电极间间隙在3mm左右情况下实验,结果显示,触摸垫在触摸前后的电容变化率较大,触控信号较强。
关键词:织物触摸垫;电极宽度;电极间间隙;互电容;触控信号
DOI: 10. 11907/rjdk.192765
开放科学(资源服务)标识码(OSID):
中图分类号:TP301
文献标识码:A
文章编号:1672-7800(2020)004-0023-05
Effects of Electrode Arrangements on the Capacitance and
nTouch Signal of Fabirc Touch Pads
GAN Xing , YANG Xu-dong, DONG Hong-qiang , HU Ji-yong
(Department of Textile , Donghua University ,Sharzghai 201620.Ch.ina)Abstract: To optimize the touching performance of the projected capacitance touch pads based on textile materials with strip elec-trodes. the siruulation and experimental validation are combined to study the ef'fects of electrode width and inter-electrode gap on therelative change rate of capacitance hefore and after touching. The results show that the initial capacitance between the driving electrodeand the sensing electrode increases with the increase of electrode width and electrode gap, but the influence of electrode width is moresignificant , and the inter-electrodes mutual capacitance in the edge of pad is srualler than that in the nliddle. In addition. when the con-ductivity of' electrodes was 61.6x 106S/m . the electrode width u-as about 2mm-3mm and the inter-electrode was approxiruately 3mm,there would he a larger relative change rate of capacitive.Key Words : textile touch pads;electrode width ; inter-electrode gap ; mutual capacitance ; touch signal
O 引言
織物基柔性投射式电容触摸垫作为一种大曲率变形和实现多点触摸定位的人机交互装置,因其质轻柔软,满足可穿戴条件而受到青睐。但由于织物材料性能、触摸垫电路结构与设计、触摸垫电极形式与结构等诸多因素限制,织物投射式电容触摸垫还不能满足敏感性和稳定性等要求。虽然市场上很早就有织物开关…、织物键盘[2]这类较为成熟的产品,但其触控点单一且不连续,无法实现平移、伸缩、多点触摸等操作。
对于以织物为介质层材料的投射式电容触摸垫,借鉴传统电子触摸装置成熟的堆栈结构T艺是必要且可行的,但诸如电极形式与尺寸、中间介质层材料与性质、电极间的相互位置等因素,必然会随着材料的变化影响触摸垫的触控性能。Maximilian等[3]以条状导电织物作为电极,以正交方式分布在泡沫隔离板的正反两侧,通过检测交叉点在触摸前后的电容变化而形成相应的触摸强度分布图,证明了条形电极作为电容传感阵列的可行性;Minpyo等[4]以石墨烯作为基底保护层,以PET膜作为介质层和电极保护层,采用条形电极形式制作传感器,以不同手势触摸实现了多点连续响应、伸展、平移等操作,但PET膜与各向异性的织物结合性较差。以上两者虽然实现了良好的触控效果,但不论是以泡沫隔离板还是以PET膜为介质层,都限制了触控装置的可穿戴应用。条形电极形式的投射式电容触摸垫是一种非压感式多点触摸感应装置,比电阻式感应装置更灵敏,有利于制作轻薄的织物触摸垫。Josue等[5]采用菱形电极形式,运用丝网印刷技术在不同织物基底上印制了两种不同电极堆叠结构的触摸板,能在操作过程中正确检测触摸点和所有触摸手势,这表明在织物基底上可以使用丝网印刷技术印制电极以制作织物触摸垫。但其只研究了中间介质对触摸垫性能的影响,对于电极结构的讨论未曾涉及。采用成熟的丝网印刷工艺印制电极,可以减小触摸垫厚度,柔软度得以增加;Barry等。[6]采用“雪花”电极,通过仿真手段研究了电极图案宽度、桥宽、间隙等多个几何参数,发现电极几何参数影响电容变化,但Josue和Barrv两位学者都没有关注条形电极分布状态对触摸垫触控性能的影响。
条形电极理论上作为一种连续的矩形条状电极,不同电极宽度和电极间隙会使电场在空间中呈不同的分布状态,在驱动电极TX与感应电极RX电压差不变时,手指触摸或接近感应电极会吸收边缘电场线,改变边缘电场强度,改变量的大小取决于边缘电场的初始强度,而电极宽度和电极间间隙义直接影响边缘电场初始强度。电极间间隙主要影响触摸前后电容的变化值,电容相对变化率受电极宽度和电极间隙的共同影响,而触摸前后电容的相对变化率义反映了触摸墊的灵敏度。孙红月人[7]以镀银导电织物作为条形电极,棉织物为保护层和中间介质层制作了电容式触摸垫,研究了电极宽度在3-7mm,电极间间隙在2-4mr之间变化对触摸前后电容变化的影响,发现电容变化显著受电极宽度影响,且基本不受电极间间隙影响,这显然与前面的论述存在一定差异。
目前对于织物触控装置的研究主要关注不同的电极材料、形式以及不同的织物介质材料对触控性能的影响,但对于条形电极分布对织物触控性能影响的研究还不够全面。条形电极结构简单,没有细小的桥接线和延展线,相较于菱形电极、“雪花”电极等电极形式,能在穿戴时频繁摩擦、挤压、剪切的环境中保持性能稳定。但条形电极宽度及电极间的间隙不能过大或过小,过大会导致触摸时可能检测不到电极间电容的变化从而削减触摸垫的灵敏度,过小会使得同时触摸多个点产生误触,所以电极宽度和电极间间隙必然存在一个数值或者分布状态,使得触摸垫灵敏度等触控性能达到最优。通过研究条形电极其电极分布对触摸垫触控性能的影响规律,寻找使触控性能最优的电极分布,以优化织物触摸垫结构。
本文选择条形电极形式,以锦纶涂层织物作为中间介质层,采用丝网印刷技术印制电极,借鉴传统电子触摸装置成熟的堆栈结构工艺,制作柔性投射式电容织物触摸垫。结合仿真分析和实验验证,研究了条形电极的电极宽度与电极间间隙对电容式织物触摸垫电容及触控信号强度的影响。
1 电容式织物触摸垫工作原理
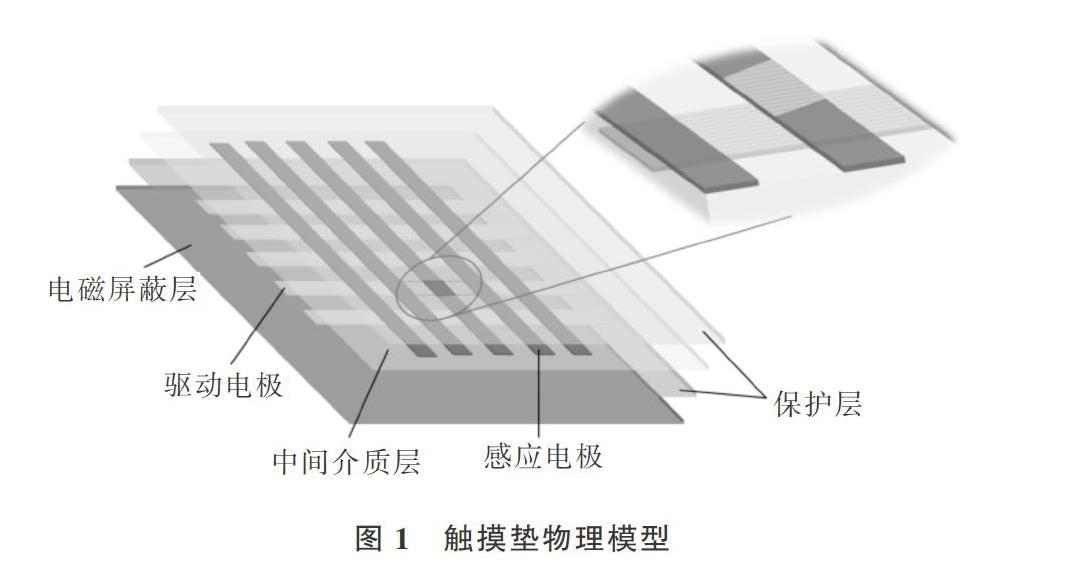
电容式织物触摸垫是一种多层堆叠结构的投射式电容触控装置,相互正交的上层感应电极和下层驱动电极分别分布在织物的上下表面,由上到下分别是上保护层、感应电极层、中间介质层、驱动电极层、下保护层和电磁屏蔽层。每条电极单独与处理芯片连接,驱动电极发出激励信号,感应电极接收脉冲信号,感应电极与驱动电极之间形成互电容。通过交叉点扫描技术扫描每个电极交叉节点在触摸前后的互电容,以触摸前后的电容变化量△C与触摸前初始电容C。的比值(即电容相对变化率)表示触控信号强度,经过信号处理实现触摸定位的目的[8]。电容相对变化率越大,触控信号强度越高,触摸垫灵敏度就越好。
由于条形电极是连续的条状电极,在驱动电极和感应电极的正交节点周围存在着很强的边缘电场,传统单电极平板电容的标准表达式C= 不适用于表示多个感应电极与驱动电极阵列间的互电容。为了研究电极分布对触控信号的影响,本文扩展单电极平板电容表达式。当感应电极和驱动电极宽度相同时,电极宽度用a表示,相邻电极间间隙用b表示,电极交叉位置可以简化为一个上、下极板面积不同的平板电容器,如图l灰色阴影部分所示。以边长为a的正方形上极板、结合两个相邻电极间隙组成的矩形下电极板构成的电容单元进行分析,采用微元法积分可得该单元的电容[9]。
式中,a为电极宽度,b为电极间间隙,A为与静电力常数和介电常数有关的物理常量,h为上下两极板间的距离(中间介质层厚度)。
2 电容式织物触摸垫电极分布仿真建模及验证
2.1触摸垫仿真建模与条件设置
触摸垫是一个由不同材料组成的“三明治”结构,本文模拟图l的堆叠结构建立物理仿真模型。各层大小及厚度根据实验需求进行设置,每层都设置为一个单独的域,整个模型置于圆柱形空气域中。在模拟触摸时,根据人体
甘行,杨旭东,董洪强,等:电极分布对织物触摸垫电容及触控信号的影响手指比例建立I:I手指模型,其触摸角度为45。,触摸面积约为31.114mm2,初始触摸点为触摸垫中心位置[lo-ll]。
上、下保护层和中间介质层具有相同的材料属性,相对介电常数相同。感应电极和驱动电极采用银材料,电磁屏蔽层采用铜材料。对于双层电极结构的触摸屏借鉴极端电压法设置边界条件,即将上层感应电极、下层驱动电极和手指均设为终端,下层感应电极电压为5V,其余终端电压均为0V[12]。电磁屏蔽层上表面设为悬浮电位,下表面设为接地边界。利用仿真软件全局矩阵计算功能,计算触摸前和触摸时电极间的电容,形成感应电极与驱动电极间的互电容矩阵。
2.2仿真模型验证
2.2.1 实物测试
为验证上述建模假设和边界没置的合理性,将仿真结果与实际触摸垫测试结果进行对比。实验采用丝网印刷方式,以锦纶涂层织物(厚度为120um,1000MHz时介电常数为2.01)为基底印制电容式织物触摸垫。其中感应电极11根,从左到右分别按R1、R2、……、R11编号;驱动电极11根,从前到后分别按T1/T2、……、T11编号。手指触摸点为触摸面板中心点,即R6与T6交叉点处。这里选取电极宽度为4mm,电极间间隙为4mm规格的触摸垫,每测量前将驱动电极与感应电极短接30s,再采用LC-200A电感电容表分别逐一测量驱动电极与感应电极间的电容,系统测量误差为+0.05pF。
2.2.2仿真验证
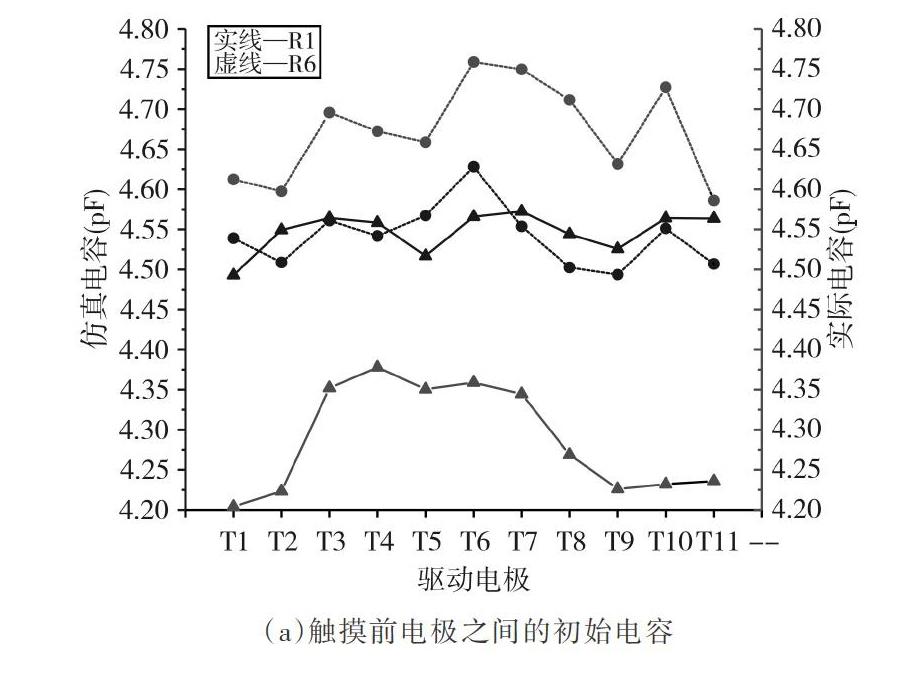
图2(a)为电极宽度为4mm、电极间间隙为4mm规格的触摸垫在触摸前不同驱动电极和感应电极R1、R6之间的初始电容。对比仿真结果和实际测量结果可知,触摸面板上呈边缘电容小、中间电容大的分布状态。同时,在相对应点处的电容,仿真得到的结果与实际测量结果有相似趋势;图2(b)是触摸前后驱动电极与部分感应电极间电容相对变化率,即触控信号。不论是仿真结果还是实际测量结果都表明,在触摸点处触控信号强度最大,非触摸位置电容变化小。
在测量误差允许的范围内,实验测量结果与仿真结果在触摸前后都具有相似的分布状态,这表明仿真具有一定的合理性,可以用来分析条形电极分布对触控信号的影响。
3仿真实验设计
实验证明仿真设计[13-16]具有很好的参考价值。为了更好地观察电极分布对触摸垫触控信号的影响,本文根据实验验证得到的正确仿真参数,建立如下仿真分析设计。
由于人体手指的触摸宽度在7-9mm左右,设定電极最大宽度和电极间间隙不超过/mm。同时,为了保持使用前后触控性能的稳定性,选择6种电极宽度( 2mm、3inm、4mm、Smm、6mm、7mm)和7种电极间间隙(Imm、2mm、imm、4mm、5inm、6rnm、7mm),两两组合,组成共计42种电极分布形式进行仿真模拟;同样设计感应电极11根,从左到右分别按R1、R2、……、R11编号;驱动电极11根,从前到后分别按T1、T2、……、T11编号。仿真过程中,触摸点为触摸面板上表面中心点,其它边界条件设置不变,计算触摸前与触摸过程中不同电极之间的电容值和电容相对变化率,研究电极分布对电容及其变化的影响。
4仿真结果分析
4.1电极宽度与电极间间隙对互电容的影响
图3(a)是应用仿真得到的手指触摸之前不同电极宽度下中心点处感应电极与驱动电极间的互电容,即感应电极R6与驱动电极T6之间的电容。由图3(a)可知,在电极间间隙保持不变时,随着电极宽度的增加,电极间的互电容快速增加。显然,随着电极宽度的增加,上下极板间的面积呈指数增加,这必然导致两电极板间的电容迅速增大。图3(b)是电极间间隙为4mm,不同电极宽度下的T6与R6间的互电容及其根据理论公式(1)进行的拟合曲线。拟合曲线调整系数为0.999 98,说明仿真结果满足理论计算公式,这也进一步证实了仿真的准确性。从拟合曲线可以看出,随着电极宽度的增加,互电容曲线斜率增加。并且从拟合曲线可以看出,随着电极宽度的增加,互电容曲线斜率增加,斜率大于曲线y=Kx2的斜率,K为常数,说明即使材料相同,电极宽度也不是影响极板间电容的唯一因素。
图4(a)是当电极间间隙不同时触摸之前驱动电极T6与感应电极R6之间的初始互电容。可以看出,在某一电极宽度下,随着电极间间隙的增加,电极间的互电容是增加的。因为从电场分布来说,电极间间隙增大了两条驱动电极间隙间的电场线数量,使得驱动电极接收到的电场线数量增加,从而导致极板间的互电容增大。图4(b)是电极宽度为4mm时不同电极间间隙下驱动电极T6与感应电极T6之间的互电容,以及根据公式(1)进行拟合得到的非线性拟合曲线,其中拟合曲线的调整系数为0.997 31,说明仿真结果与理论公式吻合。由拟合曲线可以看出,随着电极间间隙的增大,电极间电容的增加斜率减小,这也可以通过理论公式(1)求偏导得到。显然,电极宽度和电极间间隙共同影响驱动电极与感应电极间的互电容,但电极宽度的影响更显著。
4.2电极分布对触控信号的影响
图5分别给出不同电极宽度和不同电极间间隙对触摸前后电容相对变化率的影响。当电极宽度较小时,电容相对变化率随着电极间间隙变化较为明显;当电极宽度达到6mm以上时,电极间间隙的变化对触控信号影响很小。这是因为随着电极宽度的增加,手指触摸时吸收的电场线数迅速减小,手指对电场在空间分布影响减弱,导致在触摸前后电容相对变化率降低。另外,在触摸前后电容相对变化率较大时,随着电极宽度的增加,触控信号强度减小;而随着电极间间隙的增加,触控信号先增大后减小。对比图5(a)和图5(b)可以看出,电极宽度为2-3mm和电极间间隙为imm左有时,触摸前后电容相对变化率较大,其触控信号较强。
5 结语
本文研究了电极分布对全织物触摸垫初始电容和触控信号的影响规律。针对不同的电极宽度和电极间间隙,以触摸前后电容的相对变化率为表征指标,得到如下结论:
(1)触摸垫初始电容呈中间区域较大、边缘区域小的分布状态。同时,初始电容随着电极宽度的增加而增加,斜率也逐渐增加;随电极间间隙增加而增加,但斜率逐渐减小。电极宽度和电极间隙共同影响触摸垫的初始电容,但电极宽度影响更显著。
(2)在触控信号较大时,触摸前后触控信号随电极宽度的增加呈下降趋势,随电极间间隙的增大呈先增加后减小趋势。
(3)电极宽度为2-3mm和电极间间隙在3mm左右时,触摸前后电容变化率较大,其触控信号较强。
通过研究条形电极的电极分布对电容式触摸垫电容及触控信号强度的影响,更加清晰地了解到电极宽度与电极间间隙对触摸垫触控性能的影响规律,为条形电极形式的投射式电容织物触摸垫的电极设计提供了依据,可更好地指导后续织物触控装置设计,改善电容式织物触摸垫的灵敏度。
参考文献:
[1] 李乔,丁辛.织物开关的研制[J]东华大学学报(自然科学版),2009,35( 2):161-166
[2]TAKAMASTSL S , LONJARET T. ISMAILOVA E . et al. Wearable key-board using conducting polymer electrodes on textiles [J] . Ad.-ancedMaterial. 2016. 28( 22) : 4485-4488.
[3]SERCIO M . MANARESI N , CAMPI F. et al. A dvnamicalb- reconfig-urahle monolithic CMOS pressure sensor for smart fahric [Jl. IEEEJournal of Snlid-State Circuits. 2003 . 38( 6) : 966-975.
[4]KANC M . KIM J. JANC B . et al. Graphene-hased three-dimension-al capacitive touch sensor for wearahle electronics [J]. ACS Nano,2017. 11( 8) : 7950-7957.
[5]FERRI I. LIDON-ROGER J V , MORENO J. et al.A wearahle textile2d touchpad sensor based on screen-printing technology materials[ E B/OL ] . https :小fww.mdpi.com/1996- 1944/10/12/1450/htm
[6] CANNON B. BRENNANr C.Electrostatic simulation methodology forcapacitive touch-screen panels[C] 25th lET Irish Signals&SvstemsConference 2014 and 2014 C.hina-Ireland International Conference onInformation and Communities Technolr)gies, 2014: 216-220.
[7]孙红月,甘行,杨旭东,等.电极尺寸及排列结构对全织物投射式电容触摸垫触摸性能的影响[J.产业用纺织品,2019, 37 (2): 20-25
[8] 翁小平.触摸感应技术及其应用[M].北京:北京航空航天大学出 版社.2010.
[9] 梁成升,平行板类电容器电容的计算[J].物理与工程,2009, 19(1):58-60.
[10]11 TTGEN A. SHARMA S K, ZHOL D,et al.A fast simulation meth-odology for touch sensor panels: formulation and experimental v alida-tion[Jl. IEEE Sensors Jc)urnal. 2019. 19(3):996-1007.
[11] 劉延东,周恩学,董德帅基于Comsol的电容传感器仿真研究[J].电气电子教学学报,2015. 37(1):74-78.
[12]谢江容.投射式电容触摸屏的灵敏度探究[D]南京:南京航空航天大学,2017.
[13]SAN J. Sliders and wheels touch sensor design guide[Rl.10752A-AT42-08/11, 2011.
[14]SCOTT B, SANTA C.CTSU capacitive touch electrode design refer-enc.e[R].ROIAN3958EJ0100, 2016.
[15] INFINEON T. Design guideline for capacitive touch-sensing applica-tion[ EB/OL].http: //www.docin.com/p-497908629.html.
[16] CAMACH0 0, VIRAMONTES E.Designing touch sensing elec-trodes: electrical considerations and recommended lavout patterns[ R]. Mexico: Freescale Semiconduemr, Application Note: AN3863, 2011.
(责任编辑:杜能钢)
收稿日期:2020-01-09
作者简介:甘行(1995-),男,东华大学纺织学院硕士研究生,研究方向为功能纺织品设计与制备;胡吉永(1979-),男,东华大学纺织学
院教授、硕士生导师,研究方向为纺织纤维基柔性电子元器件设计、制备及评价技术。本文通讯作者:胡吉永。
