结合Kalman滤波和LBP纹理的CAMShift改进算法
2020-06-19于国庆吴赛敏
于国庆 吴赛敏
摘 要: 针对传统CAMShift算法,在颜色相似干扰、目标快速运动等复杂背景中跟踪目标丢失的问题,提出一种结合Kalman滤波和LBP纹理的CAMShift改进算法。为了验证提出算法的合理性,使用农田作业机械安装的摄像头实现图像的动态采集,选取图像中的特定目标作为目标模板,采用Kalman滤波器预测下一帧特定目标的位置区域,用改进LBP算法的纹理特征与色彩概率分布图进行相与运算,将得到的结果应用到特定目标跟踪中。实验结果表明,改进后的算法在跟踪特定目标方面具有较高的准确性和鲁棒性。
关键词: CAMshift算法; Kalman滤波器; LBP纹理; 图像采集; 位置预测; 目标跟踪
中图分类号: TN713?34; TP391.41 文献标识码: A 文章编号: 1004?373X(2020)12?0065?04
Abstract: As the traditional CAMShift algorithm has the problem that the tracking object is lost in the complex backgrounds such as color similarity interference and fast target motion, an improved CAMShift algorithm combining with Kalman filtering and LBP texture is proposed. In order to verify the rationality of the proposed algorithm, the dynamic image acquisition is realized by the camera installed by the farm machinery, the specific objective in the images are selected as the target template, and the Kalman filter is used to predict the location area of the specific targets in the next frame. The texture feature and color probability distribution map of the improved LBP algorithm are combined and operated, and the obtained results are applied to the specific target tracking. The experimental results show that the improved algorithm has has higher accuracy and robustness in tracking specific targets.
Keywords: CAMshift algorithm; Kalman filter; LBP texture; image collection; location prediction; target tracking
0 引 言
在計算机视觉研究领域,目标跟踪问题是当前研究的热点话题[1]。近年来,Meanshift算法已被广泛应用于目标跟踪,但也有不足之处。当跟踪目标的尺度发生变化时, Meanshift算法[2]无法对目标模型进行更新,影响目标跟踪的准确性。
为解决Meanshift算法无法实时更新目标模型的问题,Bradski在Meanshift算法的基础上提出CAMShift算法,它是一种基于颜色概率信息的半自动跟踪算法[3],当存在颜色相似、目标快速运动等干扰时,会出现目标跟踪丢失的情况。为解决目标快速运动导致跟踪效果不理想的问题,国内外学者对CAMShift算法进行了改进,Huang等人提出采用Kalman滤波器预测下一帧中特定目标的位置,但目标位置的准确性会受到颜色相似干扰的影响[4]。为解决颜色相近干扰问题,Ojala等人提出了LBP算法[5],它计算量小,满足实时跟踪目标的需求,将LBP特征融合CAMShift算法中,解决了传统CAMShift算法以颜色概率特征跟踪的不足。
针对目标快速运动、颜色干扰导致目标跟踪丢失的问题,提出一种结合Kalman滤波和LBP纹理的CAMShift改进算法。利用色彩概率分布图和纹理概率分布图的融合来确定跟踪目标的特征。为了减少CAMShift算法的计算量,可利用Kalman滤波[6]预测特定目标位置区域。实验结果证明,本文提出的方法能更准确地跟踪特定目标。
1 算法研究
1.1 CAMShift算法
CAMShift算法以视频图像中的目标颜色信息为基础进行跟踪。另外,该算法可根据特定目标尺度变化连续调整搜索窗口的大小,视频的每帧图像都采用Meanshift算法来找最佳迭代结果[7?8]。算法的思想过程如下[9]:
1) 选择特定跟踪目标作为模板目标,确定搜索窗口的大小;
2) 计算搜索窗口的色彩概率分布图;
3) 用Meanshift算法迭代当前帧的搜索窗口;
4) 由步骤3)获得的搜索窗口信息继续跟踪下一帧图像,再执行步骤2)以实现目标的连续跟踪。
1.2 LBP算法
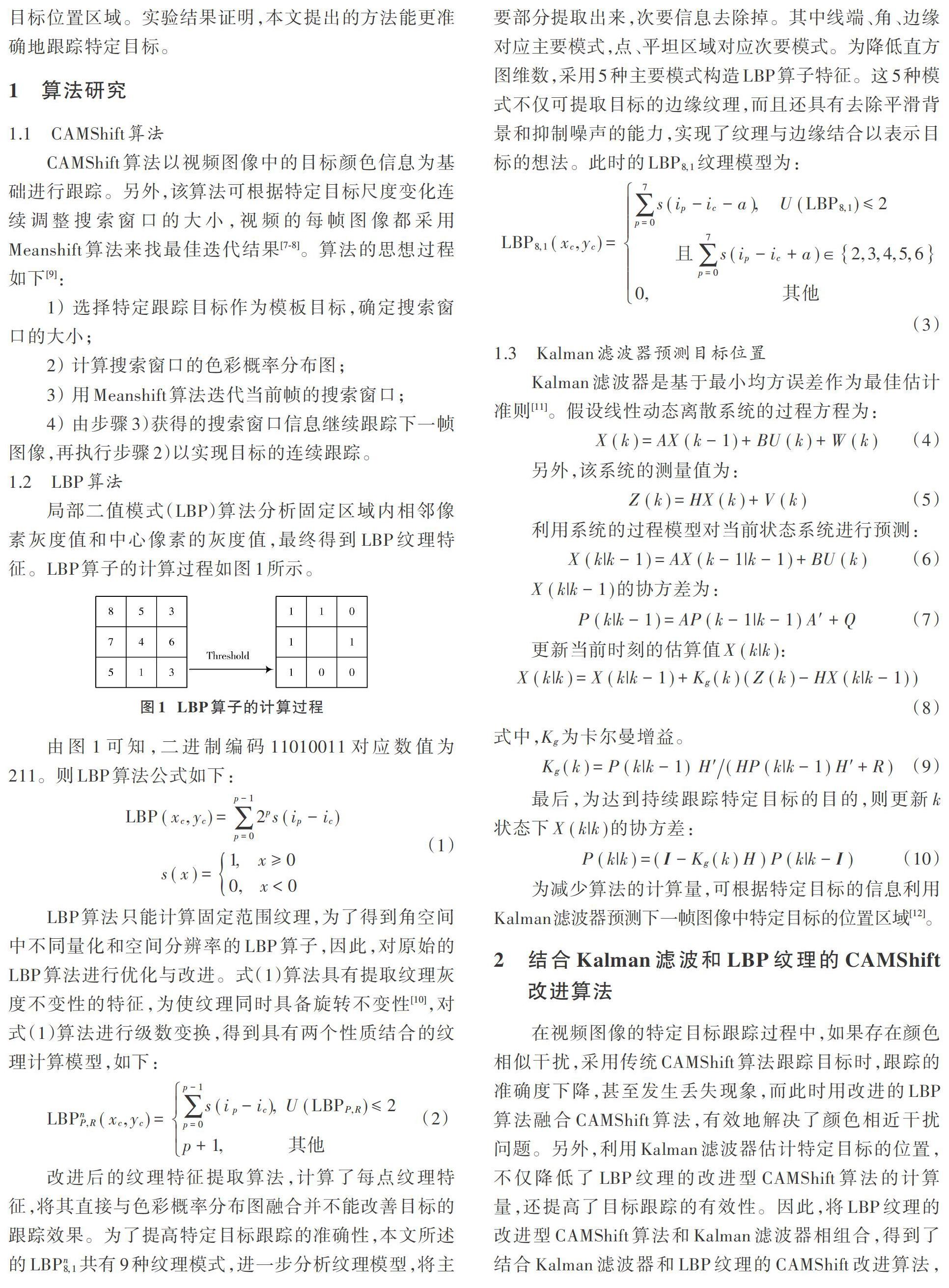
局部二值模式(LBP)算法分析固定区域内相邻像素灰度值和中心像素的灰度值,最终得到LBP纹理特征。LBP算子的计算过程如图1所示。
为减少算法的计算量,可根据特定目标的信息利用Kalman滤波器预测下一帧图像中特定目标的位置区域[12]。
2 结合Kalman滤波和LBP纹理的CAMShift改进算法
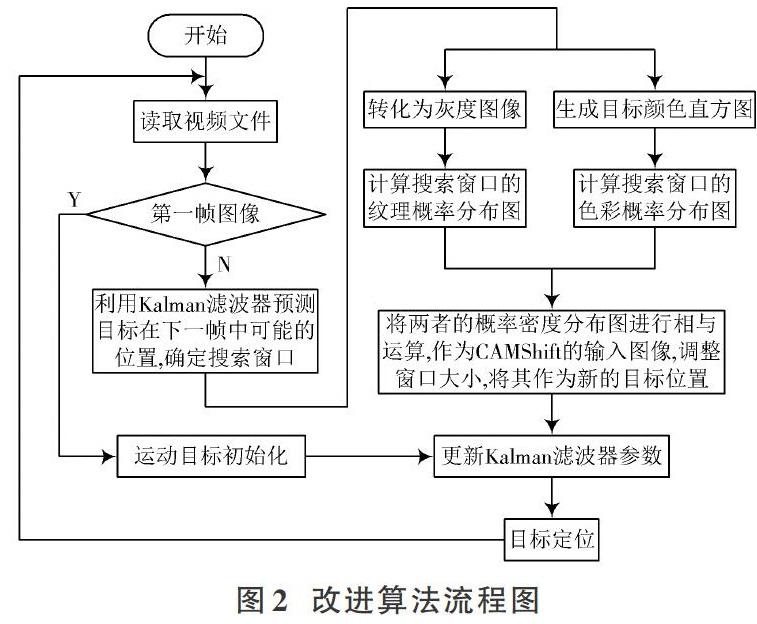
在视频图像的特定目标跟踪过程中,如果存在颜色相似干扰,采用传统CAMShift算法跟踪目标时,跟踪的准确度下降,甚至发生丢失现象,而此时用改进的LBP算法融合CAMShift算法,有效地解决了颜色相近干扰问题。另外,利用Kalman滤波器估计特定目标的位置,不仅降低了LBP纹理的改进型CAMShift算法的计算量,还提高了目标跟踪的有效性。因此,将LBP纹理的改进型CAMShift算法和Kalman滤波器相组合,得到了结合Kalman滤波器和LBP纹理的CAMShift改进算法,具体步骤如下:
1) 读取视频序列,选取特定目标;
2) 确定搜索窗口并初始化卡尔曼滤波器的相关参数;
3) 利用Kalman滤波器预测特定目标在下一帧中的位置;
4) 根据特定目标的颜色特征,用CAMShift算法统计搜索窗口的直方图,通过反向投影获得色彩概率分布图;
5) 当前帧的搜索窗口内每一个像素与其周围8个点的像素值进行比较,统计搜索窗口中各个纹理级别像素的个数,用纹理直方图的形式表示,将得到的纹理直方图反向投影,得到纹理概率分布图;
6) 将纹理概率分布图与色彩概率分布图进行相与运算,得到的灰度图像作为CAMShift算法的输入图像,以便确定当前帧的候选目标信息;
7) 在下一帧图像中,将步骤6)中得到的候选目标的信息更新Kalman滤波器,确定搜索窗口,返回步骤3)继续执行,连续跟踪目标。
改进算法的流程图如图2所示。
3 实验结果分析
实验在VS2010开发平台上进行仿真,利用VC++语言和开源代码OpenCV联合编程实现。由安装在农田作业机械上的USB摄像头拍摄的视频作为测试序列,选取视频图像中的特定目标进行跟踪,验证改进后的算法在目标跟踪方面,具有较高的准确性和鲁棒性。
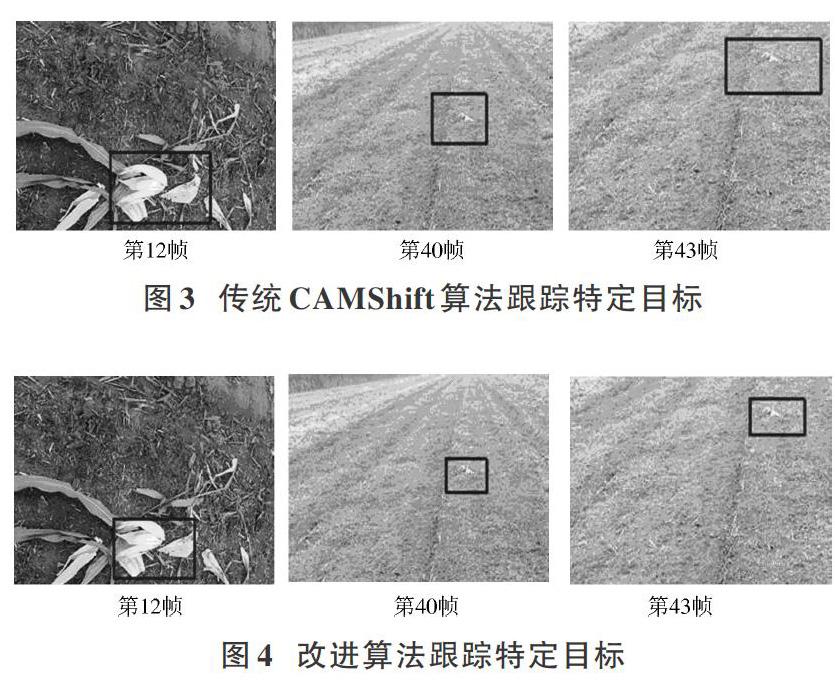
本文使用两组视频图像分别在农田作业机械快速运动和存在相似颜色背景情况下对本文算法进行验证。图3、图4为安装摄像头的农田作业机械做快速运动时,拍摄的视频图像。在图3中,从第12~43帧农田作业机械快速运动时,矩形框逐渐变大,不能很精确地跟踪特定目标,产生很大的误差,甚至往后的视频图像中出现跟踪丢失目标现象,所以传统CAMShift算法在稳定性和效果方面有一定的降低。图4采用改进后的算法来跟踪特定目标,在第12~43帧中,矩形框可更准确地跟踪目标,这是由于局部二值模式反映的是图像的纹理特征,即使出现外部因素的变化时,局部二值模式的值也不变。因此改进后的算法在特定目标跟踪方面稳定性较好。
图5、图6为颜色相似干扰的复杂背景环境、农田作业机械匀速运动时的代表图片,将遗落的农作物作为跟踪的特定目标,选取第28帧视频图像的农作物作为跟踪特定目标的初始帧。图5仅采用传统的CAMShift算法跟踪农作物,地里的玉米秸秆对目标跟踪造成了干扰,可以看出从第56帧开始,跟踪目标的矩形框逐渐变大,直到第68帧矩形框几乎遍布整个图像,出现目标丢失情况。这是因为传统的CAMShift算法以颜色特征作为目标跟踪的主要依据,所以存在颜色干扰时,跟踪效果较差。图6采用改进后的跟踪算法,视频图像中的农作物与周围环境颜色相似,但跟踪并没有受到干扰物影响,农作物得到了很好的跟踪,并未出现丢失跟踪目标的情况。
4 结 语
为了提高传统CAMShift算法在目标跟踪方面的准确性和鲁棒性,本文提出一种结合Kalman滤波和LBP纹理的CAMShift改进算法。该算法将纹理概率分布图与色彩概率分布图进行融合,作为目标特征进行跟踪,当存在目标与背景颜色大面积相似干扰时,不会影响目标跟踪的效果,并用Kalman滤波器估计特定目标的位置,解决了农田作业机械快速运动时目标丢失的问题。实验结果表明,改进后的算法在目标跟踪方面达到了期望的效果,具有较高的准确性和鲁棒性,是一种可以进行广泛应用的算法。
参考文献
[1] 高琳,唐鹏,盛鹏,等.复杂场景下基于条件随机场的视觉目标跟踪[J].光学学报,2010,30(6):1721?1728.
[2] SUN J. A fast Meanshift algorithm?based target tracking system [J]. Sensors, 2012, 12(6): 8218?8235.
[3] 陈向平,李平.基于色彩特征的CamShift视频图像汽车流量检测[J].沈阳工业大学学报,2015,37(2):183?188.
[4] HUANG S L, HONG J X. Moving object tracking system based on camshaft and Kalman filter [C]// International Conference on Consumer Electronics, Communications and Network. Xianning: IEEE, 2011: 1423?1426.
[5] OJALA T, VALKEALAHTI K, OJA E, et al. Texture discrimination with multi?dimensional distributions of signed gray level differences [J]. Pattern recognition, 2001, 34(3): 727?739.
[6] 瞿卫欣,程承旗.基于Kalman滤波的Camshift运动跟踪算法[J].北京大学学报(自然科学版),2015,51(5):799?803.
[7] 尚波,胡鹏,柳玉炯.基于改进Mean?shift与自适应Kalman滤波的视频目标跟踪[J].计算机应用,2010,30(6):1573?1576.
[8] 储珺,杜立辉,汪凌峰,等.基于局部背景感知的目标跟踪[J].自动化学报,2012,38(6):1985?1995.
[9] 刘士荣,孙凯,张波涛,等.基于改进CamShift算法的移动机器人运动目标跟踪[J].华中科技大学学报(自然科学版),2011,39(z2):223?226.
[10] 刘富,宗宇轩,康冰,等.基于优化纹理特征的手背静脉识别系统[J].吉林大学学报(工学版),2017(11):1?6.
[11] 余彦霖,祖家奎,廖智麟.基于卡尔曼滤波的MUH姿态信号融合算法研究[J].电子测量技术,2015,38(5):106?110.
[12] HOWARD M, PAUL Z. Fundamentals of Kalman filtering: a practical approach, second edition [J]. Progress in astronautics & aeronautics, 2015, 190(8): 8218?8235.
