新型观察级ROV建模与俯仰角控制研究
2020-06-18齐向东
郝 远,齐向东
(太原科技大学电子信息工程学院,太原 030024)
21世纪是世界各国全面开采海洋资源的全新时代。遥控式有缆水下机器人(ROV,Remote Operated Vehicle),是一种专门用于水下监测与作业的无人水下机器人,正越来越多的受到人们的关注。由于水下环境复杂,水流流向、流速的多变性,洋流的影响,使得水下机器人在水中的受力情况非常复杂,因此进行精确的受力分析,建立合理的数学模型是控制的前提[1-3]。
由于传统PID控制结构简单,参数易调节,现阶段我国ROV的运动控制仍大量采用这一控制方法[4]。智能控制理论中的模糊控制,自适应控制具有更好的控制精度与反应速度,但是由于这些算法在程序中实现较为复杂,工程上实际很少采用。本文在传统PID的基础上,设计了一种双闭环PID控制器,由于采用两变量作为反馈,可以提高控制的精度,有效的做到伺服控制,并通过Matlab/simulink 进行仿真,仿真曲线与传统PID控制器作对比,验证双闭环PID控制器的控制效果。
1 新型观察级有缆水下机器人简介
ROV 主体包括水密耐压壳体、动力系统、观测和照明系统、传感器检测系统、控制系统和通信系统等[5]。
新型观察级有缆水下机器人外部结构如图1所示。其中①为透明导流罩,内部安装有摄像机用于采集图像,并上传至上位机供操作者观察水下环境。②为ROV照明系统,透明罩内装有LED照明灯。③为ROV顶部螺旋桨,提供ROV的升降动力。④为ROV后部推进器,两边各一,为ROV的前进转向等提供动力。⑤为ROV电池舱,为ROV的运行提供能量。⑥为电子舱,微型控制器,主电路板,各传感器封装在内。⑦为脐带缆连接口。
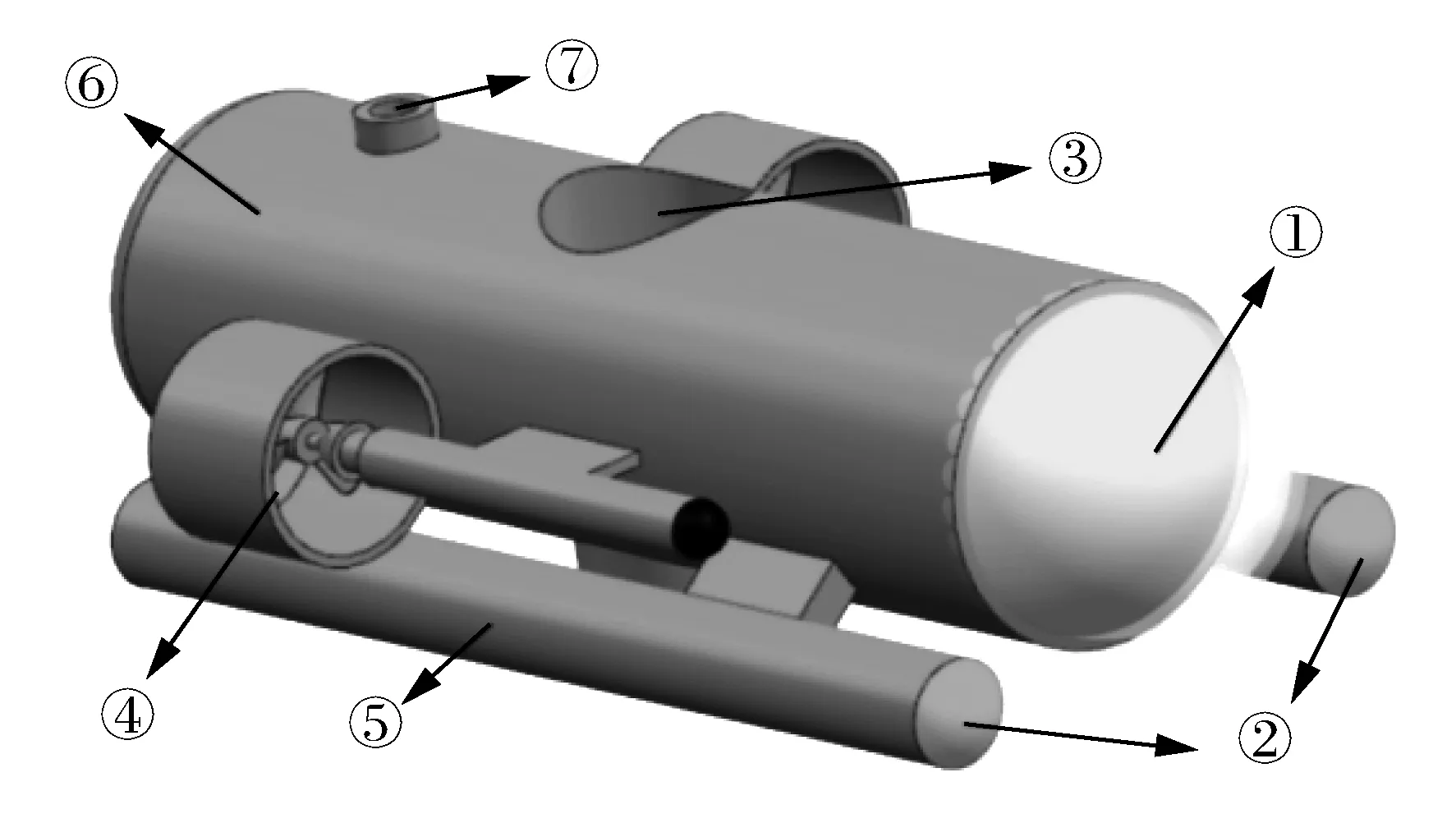
图1 新型ROV结构示意图
2 有缆水下机器人运动模型
由于水下运动具有很高的复杂程度,所以想要精确的控制ROV,首先应该建立较为准确的动力学模型。根据不同结构构造、水下作业特点、控制精度,ROV的运动模型又是各不相同的。
2.1 新型ROV推力分布
根据第一节对ROV结构特点的简单描述,可知本课题研究ROV上升下降采用一个推进器,前进后退采用双推进器平行布置,由于该ROV体积较小且采用弧形外观,容易转向,故不添加侧向推进器。
由于浅水观察级ROV最主要的作用是做浅水探测,因此保持摄像机的稳定程度是观测的最重要的前提。所以在ROV的运动控制中,如何保持悬停姿态是最重要的一环。姿态控制包括有俯仰控制、横滚控制、艏向角控制,通过控制各个推进器的转速即是姿态控制的关键方式。
2.2 六自由度运动概述
2.2.1 坐标系的建立
对于一个物体的运动描述,首先应该建立一个合适的运动坐标系。如图2所示,根据国际拖曳水池会议(ITTC)推荐的坐标体系,可建立:静止坐标系E-ζηξ(也可以称为大地坐标系,不因为载体运动而发生变化);运动坐标系G-xyz(也可称为载体坐标系,随载体运动发生变化)。此坐标体系均为右手系。

图2 大地坐标系与载体坐标系
2.2.2 运动概述
大地坐标系是一个右手空间直角坐标系,其中三个坐标轴Eη、Eζ、Eξ两两垂直,Eζ垂直向下指向地心[6]。大地坐标系一般为物体运动的参考坐标系。
载体坐标系随载体的运动而发生相应的位置变化。载体坐标系固定于载体之上,一般原点取为载体的重心,三个坐标轴同样两两垂直,且载体坐标系同样是右手空间直角坐标系。
ROV在载体坐标系上的运动总的分为平移运动与转动运动两种。平移运动:沿Gx轴平移为前进与后退;沿Gy轴平移为侧移;沿Gz轴平移为升降运动。转动运动:绕Gx轴转动,称之为横滚;绕Gy轴转动,称之为俯仰;绕Gz轴转动,称之为偏航。
在悬停姿态工作时,由于海洋中的暗流、波浪,载体不可避免的会出现俯仰运动、偏航运动;由于载体自身推进器螺旋桨旋转的因素,又不可避免的会有横滚运动的产生。这些运动都是对于悬停姿态的不利运动,所以应当及时的调节推进器的转速从而保持原有的运动姿态,这些内容于第三节控制器的设计中进行概述。
2.3 有缆水下机器人运动学方程
设ROV在载体坐标系中以G点为坐标原点的运动速度为V,角速度为Ω,受力为F,力矩为M。在Gx轴、Gy轴、Gz轴上的各个分量如表1所示。

表1 运动参数与力的载体坐标分量
设横滚角为α,右倾为正,俯仰角为β,上仰为正,偏航角为γ,右偏为正。则ROV在大地坐标系中的运动参数与偏角如表2所示。

表2 大地坐标系中的位置和运动参数
2.3.1 坐标变换
设ROV在大地坐标系中的位置为(ξ,η,ζ),在载体坐标系中的位置为(x,y,z),S为正交矩阵,则有:
(1)
则S=S(z,ζ)×S(y,η)×S(x,ξ),解得:
(2)
所以可得:
(3)
其中:
(4)
因为ROV两坐标系为正交的,由此可以得到大地坐标系与载体坐标系之间的变换矩阵S也为正交的:
S-1=ST
(5)
2.3.2 ROV六自由度运动方程
根据动量定理和欧拉方程,可得ROV的平移运动方程式为:
Ω×(Ω×Rg)]=FΣ
(6)
式中:Rg为载体坐标原点G到重心g的距离。
同样的,ROV的转动运动方程式为:
(7)
令
V=ui+vj+wk
(8)
Ω=ri+sj+tk
(9)
将式(8)与式(9)分别代入式(6)、(7)可得载体坐标系上的分量六自由度运动方程为[7]:
(10)

2.4 有缆水下机器人动力学模型
ROV在水下受到的水动力是十分复杂的,加大了受力分析的复杂程度。ROV运动时,受到的合力为重力、浮力、脐带缆的拉力、推进器的推力、水动力的共同作用。
载体非线性动力学方程可以表示为:
F=FT+f+G+Fc(t)+D
(11)
式中:F为物体所受合力,FT为推进器推力,f为浮力,G为重力,Fc(t)为脐带缆产生的力,D为水动力。
3 新型有缆水下机器人控制器设计
在ROV的运动控制系统中,控制算法是决定性能好坏最关键的一环。当ROV处于工作状态时,能够快速的到达预先位置并且保持一个稳定的悬停状态,是我们所关心的控制指标。系统运动的快速性稳定性全部取决于控制算法的精确程度。PID控制算法是现如今包括工业、机器人等应用最广泛的一种控制算法,因为其拥有模型简单,容易实现,控制效果较好等特点。通过ROV在水下的运动学模型与受力分析,并根据本课题组实验时所测得的一组水动力系数的数据,得到ROV俯仰控制问题所需传递函数。首先运用传统PID控制,其次设计一种基于PID算法的双闭环控制系统,更好的实现伺服控制。
3.1 ROV俯仰控制传递函数
俯仰运动方程可简化为:
Dww=Z
(12)
式中:Z为竖直推进器提供的推力,Dw为水动力系数,根据文献[5]实验取为112.4.
对式(12)进行拉氏变换并带入数据可得:
112.4w(s)=Z(s)
(13)
则ROV的垂向速度(下潜速度)对垂向推力的传递函数为:
(14)

(15)
即ROV的俯仰传递函数G(s)。
3.2 PID控制器介绍
PID控制[8]框图如图3所示。

图3 PID控制框图
其中
e(t)=r(t)-y(t)
(16)
PID,又称为比例、积分、微分算法,其数学模型为[9]:
(17)
传递函数形式为:
(18)
式中:Kp为比例项系数,Kp/Ti为积分项系数Ki,KpTd为微分项系数Kd[10].PID技术的关键之处就是求得这三个系数。
本文介绍的控制器为双闭环PID伺服控制器,它是以基本闭环PID控制器为基础的,双闭环PID伺服控制器的控制框图如图4。

图4 双闭环控制框图
以ROV的俯仰控制为例,xr为角度参考值,是控制系统的给定输入,经过第一个PID计算可以得到载体角速度,再经过第二个PID控制器计算,结果传递给ROV俯仰控制系统,控制推进器的运行与速度,从而获得一个相应的指标。传感器将输出的角度、角速度采集,再分别反馈给外环与内环,进行闭环控制,从而获取更高的控制精度。
4 仿真与性能检验
根据ROV系统模型,运用MATLAB仿真软件,并搭建相应的simulink仿真模型进行仿真。
4.1 俯仰角仿真
本文仅对ROV的俯仰角控制进行研究。ROV在上浮与下潜的过程中,通过改变俯仰角从而进行相应的动作,因此对俯仰角度的控制是ROV控制当中重要的一环。本文通过对传统单闭环PID算法与双闭环PID伺服控制算法进行仿真与对比。
首先调节PID参数,双闭环控制器的参数分别为:
内环:kp=3.8,ki=0,kd=0.69;
外环:kp=3,ki=1.9,kd=0.
使两种控制器得到其最优的单位阶跃相应曲线,如图5所示,单环PID的控制性能明显劣于双闭环PID的控制性能,俯仰角给定为15°,双闭环控制器只需3 s就可以达到稳定状态,而单环PID大约需要5 s才能接近稳定,由此可见双闭环控制器拥有很迅速的响应速度。在超调方面,双闭环PID控制器要略小于单闭环控制器,但相差无几,基本可以忽略。由此可见,双闭环PID控制器的控制效果更优。

图5 仿真曲线对比
如图6所示,当给定俯仰角为45°时,双闭环系统的响应。当给定俯仰角为45°,单环PID控制的响应曲线如图7所示,同样可以看出双闭环PID控制器的控制效果更好。

图6 双闭环仿真曲线

图7 单闭环仿真曲线
4.2 带扰动仿真曲线
因为ROV工作环境为水下,实验环境为拖曳池实验、湖试、海试。这三种情况下,扰动等级又是不同的。当潜水器位于大海中时,扰动强度往往是十分大的,因此对控制器的性能具有相当高的要求。
当进行仿真时,必须进行带扰动的仿真。如图6所示,给定俯仰角为45°,此时系统没有任何的附加扰动。如图8所示,为增加一单位冲击扰动后,(模拟拖曳池水流)系统的响应曲线。对比图6与图8可知,当系统增加扰动之后,超调量会变大,同时达到稳定的时间会加长,但是同时又说明了此控制器可以抵抗这一等级的扰动,具有一定的可靠性。

图8 带一定扰动的仿真曲线
图9为在拖曳水池实验时(无扰动)ROV实时运动俯仰角数据的散点图连线,时间间隔为0.5 s,取点为40个,与图5双闭环PID响应曲线对比可以看出误差范围不超过正负2%,因此这一控制方法是可以接受的。

图9 俯仰角实际轨迹图
5 结语
本文提出了一种新型小型浅水观察级ROV,首先介绍了它的物理模型、数学模型以及简单的动力学模型;设计了一种双闭环PID控制器,并举例说明了对俯仰角的控制方式;之后进行了matlab仿真与simulink建模,验证了模型在控制器的作用下可以很好的运行,并增加扰动仿真,系统仍然可以满足控制的要求,因此这一系统是可行的。
