基于二元决策图的护航编队多阶段任务体系可靠性分析
2020-06-18卞瑞兵张扬潘正强程志君白森洋
卞瑞兵, 张扬, 潘正强, 程志君, 白森洋
(1.国防科技大学 系统工程学院, 湖南 长沙 410073; 2. 92942部队, 北京 100089)
0 引言
护航编队是一个典型的多阶段任务体系(PMSoS),涉及的平台包括驱逐舰、护卫舰、综合补给舰和舰载直升机,各平台的组成系统也比较复杂,主要有指挥控制系统、通信系统、机动系统、对海侦查系统、定位系统和火力打击系统,且系统寿命服从不同类型的分布,在各阶段的完成任务要求也各不相同,因此对整个体系可靠性提出了很高的要求。目前,国内外对护航编队PMSoS可靠性方面的研究还比较少,为了提高编队遂行护航任务的成功率,保护航行海域中外船舶以及人员的安全,本文对护航编队遂行多阶段任务的可靠性进行分析,为编队制定任务方案提供一个分析的依据。

图1 护航编队各阶段任务可靠性框图Fig.1 Reliability block diagram of each phase mission for escort formation
多阶段任务系统(PMS)是指包含有多个必须按顺序完成、不重叠的操作系统或任务阶段的系统[1]。与单阶段任务系统相比,由于给定系统(元件)在不同阶段之间具有相关性,使得PMS的可靠性分析更加复杂。具体来说,假设系统及其元件在任务期间不可修复,则系统(元件)在一个阶段开始时的状态应该与其在前一个阶段结束时的状态相同。现有的PMS可靠性分析方法主要有仿真和分析建模两类[2]:仿真方法对于系统表示而言,通用性很好,但计算量较大,并且只能得到系统可靠性测量的近似结果[3-6];分析建模技术实现了系统表示的灵活性、解决方案的易用性,因此吸引了大量学者进行研究。现有的分析建模方法可以分为基于状态空间的模型[7-15]、组合模型[1,7-9,14-17]和模块化方法[18-20]3类。文献[10-11,15]中提出利用Markov模型,文献[12]中采用分层和模块化的方法,文献[13]中采用Markov模型和Petri网模型对多阶段任务进行分析,都属于基于状态空间的动态模型,能够表示PMS各平台或系统之间复杂的依赖关系,但在求解上有很大的局限性。模块化方法[18-20]采用二元决策图(BDD)和Markov模型分别计算系统中静态模块和动态模块,结合了二者的优点,但只能计算寿命服从指数分布的情况。
BDD是组合模型方法中的一种重要方法。传统的PMS可靠性BDD模型使用布尔代数规则处理给定系统(元件)在不同阶段间的相关性,采用这种方式得到的BDD模型只能计算PMS总体任务的可靠度,不能计算任务在某一阶段的可靠度。但是对于护航编队,包括多艘舰船,是由多个平台构成的装备体系,相对于一般的PMS,呈现组成系统多、功能复杂、阶段依赖性强等特点,在这里称之为PMSoS. 同时,在编队执行护航任务过程中,不仅关注总体任务的可靠度,各阶段任务的可靠度也非常重要,掌握各阶段任务的可靠度有助于对各阶段方案的可行性进行判断,从而适时调整装备配置或计划方案。
为解决上述问题,本文采用基于BDD的组合分析方法,根据共同失效基本任务对阶段故障树进行化简,大大简化了护航编队PMSoS的分析和计算过程,并采用BDD建模方法,对编队任务体系各阶段成功事件进行分析,计算总体任务以及总体任务进行到各阶段的可靠度。
1 护航编队各阶段任务可靠性框图建模
护航编队的典型编成,包括1艘驱逐舰、1艘护卫舰、1艘综合补给舰和2架直升机。编队由驱逐舰担任指挥舰,相对于护卫舰和综合补给舰,配备了对岸卫星通信系统和编队指挥系统,驱逐舰和护卫舰相对于综合补给舰还配备了对海雷达搜索系统,其余系统包括机动、定位、通信等基本相同。任务阶段包括航行阶段、进入海盗出入区域对海警戒阶段、对靠近海盗实施直升机驱离攻击阶段和返航阶段。
1.1 模型描述
记字母d、f和c分别表示驱逐舰、护卫舰和综合补给舰;字母A~O分别代表各装备系统;符号下标中的数字代表任务的各个阶段,则t1、t2、t3和t4分别表示航行阶段、对海面警戒阶段、驱离攻击阶段和返航阶段的结束时间。
1.2 各阶段任务可靠性框图
在对PMSoS的可靠性进行分析之前,首先要明确各阶段任务的持续时间及系统各部件在各阶段中的可靠性逻辑关系,图1给出了护航编队在各阶段任务的可靠性框图。
在航行阶段中,完成任务要求驱逐舰的指挥、对岸通信系统以及3艘舰的机动和编队内部通信系统必须处于正常状态,且3艘舰的定位系统中至少有2个处于正常状态才能完成整个编队的定位,任务持续时间为(0,t1);在对海警戒阶段中,完成任务要求驱逐舰的指挥、对岸通信系统以及驱逐舰和护卫舰的机动、编队内部通信和定位系统必须处于正常状态,且2艘舰的海面雷达搜索系统中只要有1个处于正常状态,就能通过编队内部通信系统完成信息共享,持续时间为(t1,t2);在驱离攻击阶段中,要求在海面雷达发现目标后,依据海盗的规模保证有1架直升机起飞就可以完成任务,持续时间为(t2,t3);在返航阶段,完成任务要求和航行阶段相同,持续时间为(t3,t4)。
2 PMSoS可靠性分析的BDD算法
采用BDD方法进行PMSoS可靠性分析主要包括以下5个步骤:1)给出多阶段任务可靠度计算模型;2)根据任务绘出相应的阶段故障树;3)将各阶段故障树转化为各阶段任务的BDD;4)先根据共同失效基本任务化简故障树,然后连接阶段 BDD得出阶段成功事件的BDD模型;5)简化模型并定量计算。
2.1 多阶段任务可靠度计算模型

Sq=R1∩R2∩…∩Rq,
(1)
(1)式表示当任务在阶段q成功时,阶段q之前的各阶段任务必须是成功的。进一步得到任务在各阶段的可靠度为
P(Sq)=P(R1∩R2∩…∩Rq),
(2)
由于在PMSoS中,同一个系统可能重复在多个阶段出现,而且在每个阶段的状态互相不独立,其失效也可能对不同阶段产生不同的影响,而任何一个阶段任务的失效都会导致整个任务的失效,所以这里不能简单地将每个阶段的可靠度相乘得到总体任务的可靠度。且由(2)式可知,多阶段任务R在最后一个阶段的可靠度也即总体任务的可靠度。
2.2 阶段故障树
根据图1中护航编队各阶段任务可靠性框图,可以转化为相应的阶段故障树,如图2所示。
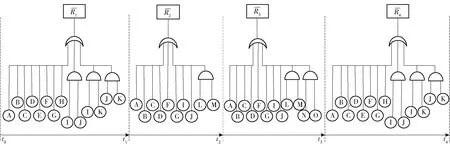
图2 护航编队各阶段任务故障树Fig.2 Fault tree of each phase mission for escort formation
2.3 阶段任务故障树转化为阶段任务BDD
阶段任务故障树转化为阶段任务Rq的BDD之前,需要对故障树中的基本事件变量排序。按照从上至下、由左到右依次遍历各阶段故障树对基本事件变量排序,给出R1、R2、R3和R4的基本事件顺序如下:
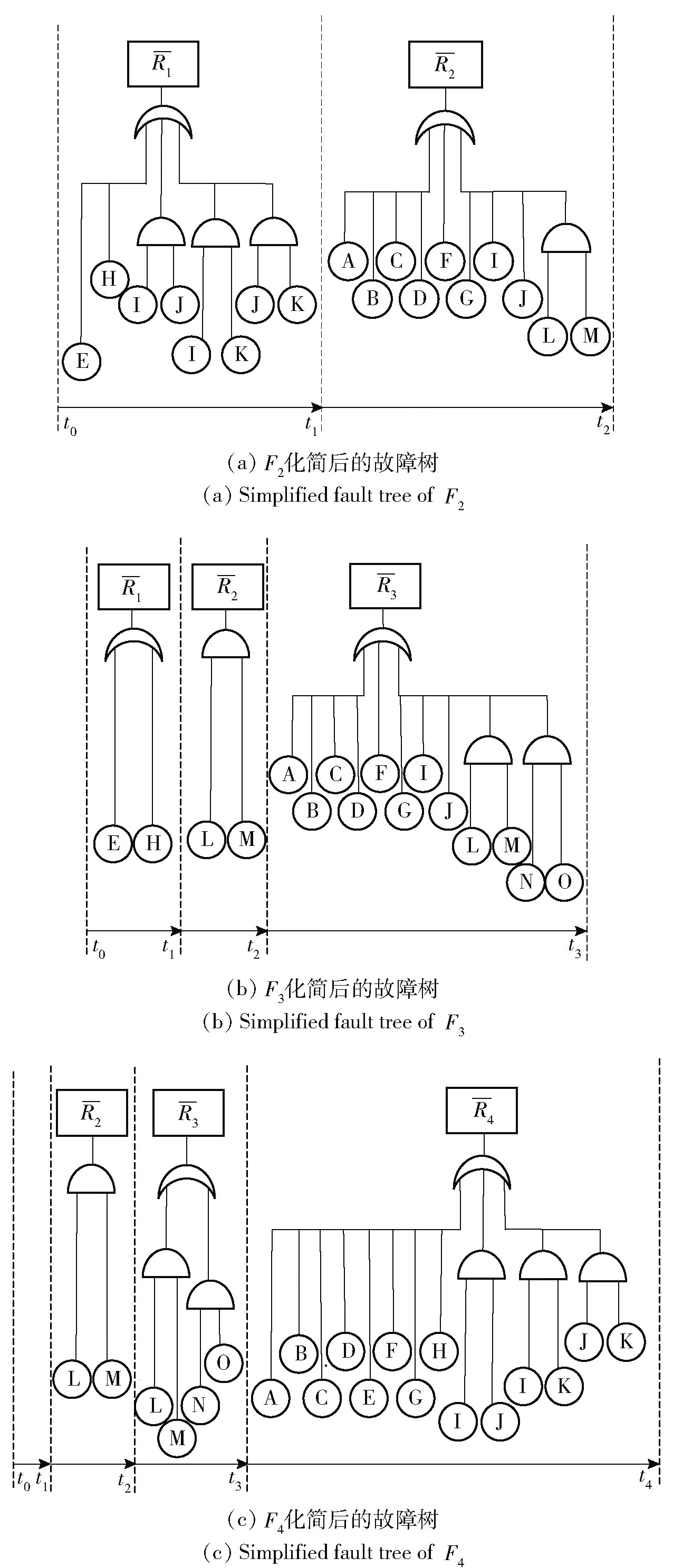
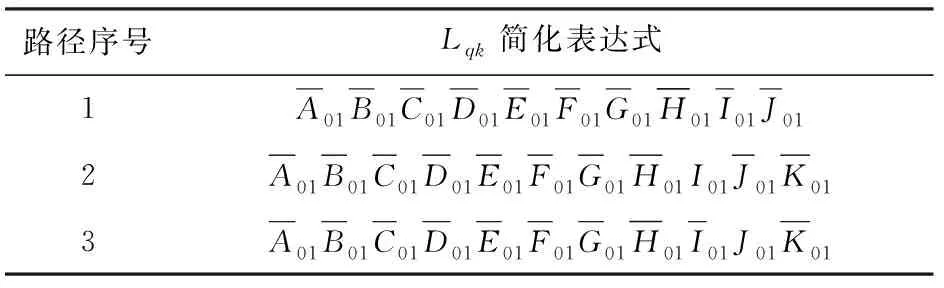
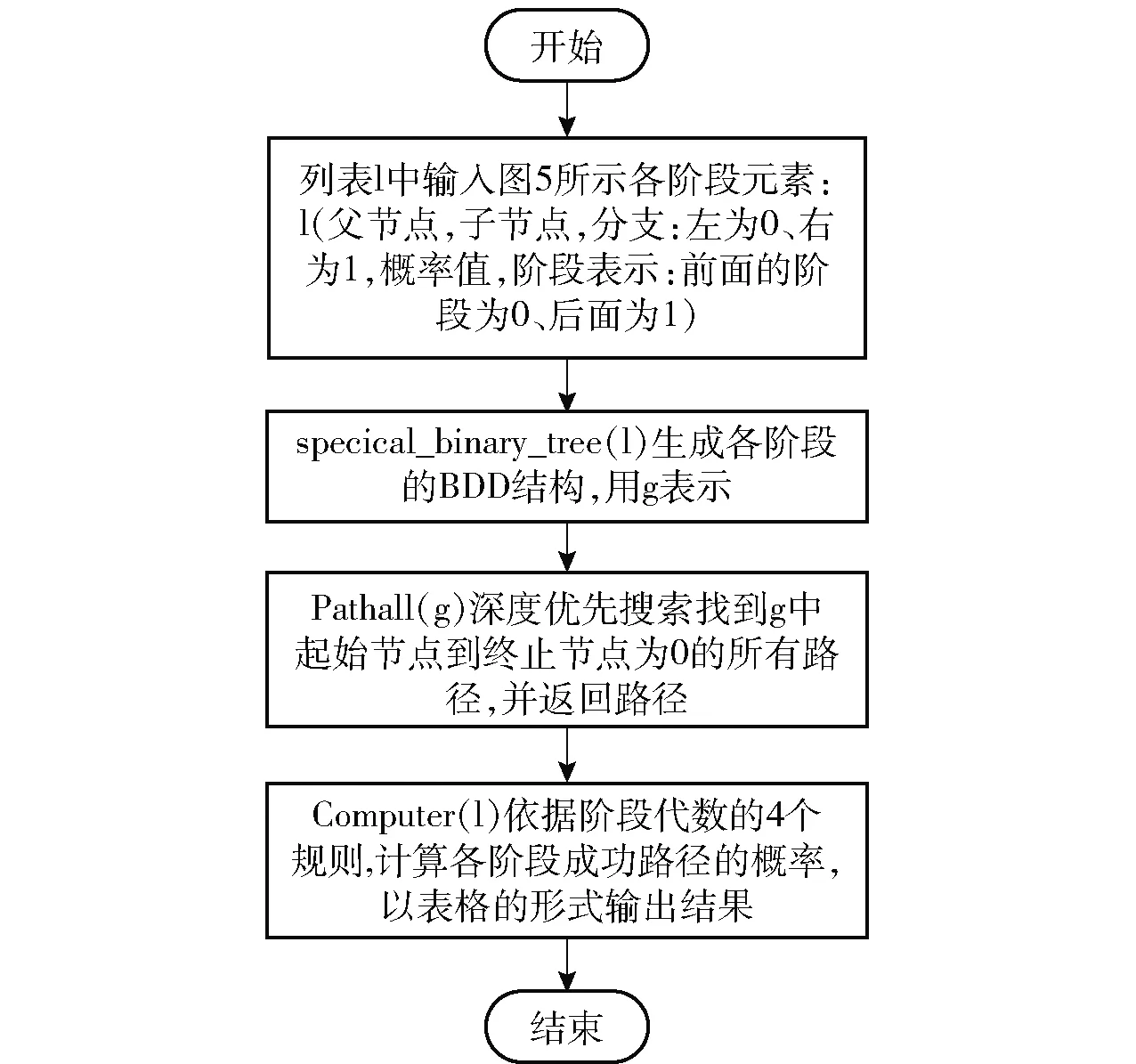
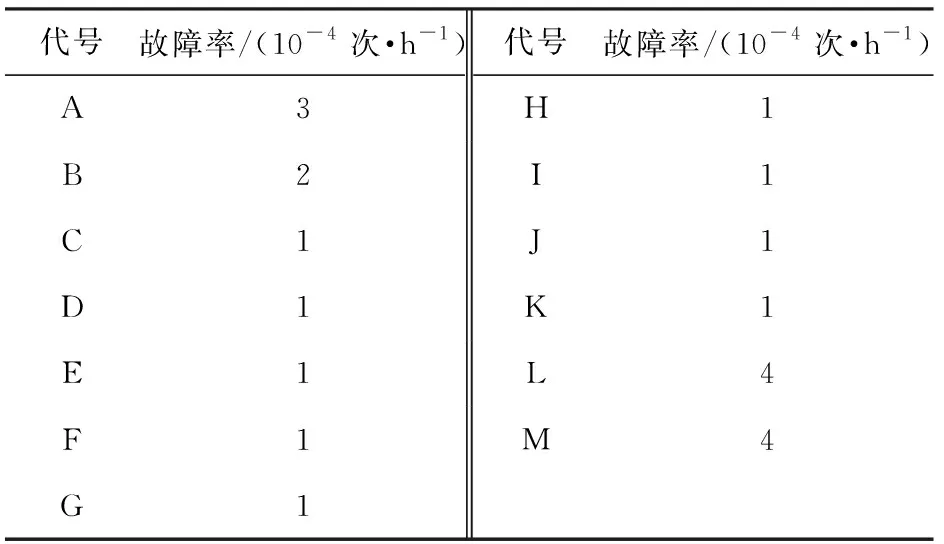
R1:A R2:A R3:A R4:A 进一步,得到Rq的BDD,如图3所示。任务开始后,所有系统均参与工作,当系统在某一阶段失效时,由于不可修,其失效状态对后续阶段也会产生影响,因此在绘制阶段BDD时要考虑系统的失效时域。如在图3中,L失效不论是在R1中发生还是在R2中发生,都会影响R2发生失效。因此,L的失效时域为(t0,t2),在R2的BDD中L失效表示为L(0,2)。 图3 护航编队各阶段任务BDDFig.3 BDD of each phase mission for escort formation 在护航编队多阶段任务可靠性模型中,存在较多的冗余结构,如n中取k结构,以及共同失效基本任务,导致分析体系失效逻辑得到的故障树通常都是带重复的故障树。 在构造BDD过程中,各系统在多阶段之间遵循下面的规则(i 规则1系统A在第i和第j阶段都处于正常工作状态与系统A在第j阶段处于正常工作状态等价。因为系统不可修复,如果在某个阶段是正常工作的,那么在之前的所有阶段也一定是正常工作的。 规则2系统A在第i和第j阶段都处于失效状态与系统A在第i阶段处于失效状态等价。因为系统不可修复,如果在某个阶段一旦失效,那么在之后的所有阶段也一定处于失效状态。 根据规则2,有如下定义: 共同失效基本任务。在护航编队PMSoS中,如果某个基本任务在q+1阶段直接导致了整个体系失效,那么在q阶段和之前该基本任务出现过的所有阶段,该基本任务失效都将直接导致任务体系失效。 由(1)式可知,Sq的BDD由Rq的BDD和阶段q之前的各阶段的成功BDD通过“逻辑与”关系连接而产生。因此,对于Sq来说,为了简化计算,首先根据共同失效基本任务化简故障树,然后连接化简后的阶段BDD得出Sq的BDD. 对于共同失效基本任务A,假设其在第q阶段直接导致体系失效,则:在第1阶段到q-1阶段的树中,A处于正常状态,进一步,如果A在或门下,其不会导致上层事件发生故障,则可以删去代表A的底事件;在第1阶段到q-1阶段的树中,假设A对于Fp(1 对于S2=R1∩R2,由图2可知:存在共同失效基本任务A、B、C、D、F和G,则删去阶段1中在或门下的A、B、C、D、F和G,得到前两个阶段即F2化简后的任务故障树,如图4中图4(a)所示。然后将R2的BDD根节点与化简后R1的BDD的0状态终点连接,则护航编队在第2阶段任务成功S2的BDD为连接后BDD中通往0状态终点的路径,如图5中(t1,t2)阶段所示。 图4 Fq化简后的故障树Fig.4 Simplified fault tree of Fq 所以护航编队在第1阶段任务成功S1的BDD即为R1的BDD中通往0状态终点的路径,如图5中(t0,t1)阶段所示。 图5 Sq的BDDFig.5 BDD of Sq 由图5中Sq的BDD可以得到PMSoS在阶段q满足任务成功条件的不交路径集Lq,其中Lqk表示Lq的第k条路径。对各变量的下标进行了简化表示,例如:C01表示C(t0,t1)。但是,通过遍历路径所得到Lqk的表达式往往过于复杂,在进行定量计算时需要对其进行简化[22]。 令平台中第y个系统的状态指示变量为 (3) 式中:y=1,2,…Y,且Y为平台中系统的数量,则有 (4) (4)式表示:如果系统y在时间段(t0,tq)内没有发生失效,那么它必将在tq后的某一时刻失效,(4)式的t0为PMS的任务开始时间。 根据同一事件发生的时序逻辑关系,可以对不同时段内具有“逻辑与”关系的xy作如下简化: xy(tp1,tq1)xy(tp2,tq2)= (5) 经过上述方法简化后路径中不再存在系统的阶段依赖性,并且各路径也是不相交的。表1列出了S1的BDD不交路径集简化表达式。 表1 S1的不交路径集简化表达式 由于通过BDD得到的各路径不相交,因此可得 (6) 例如,对于表1中的S1有 (7) 其中 (8) fA为系统A失效概率密度函数,且有 (9) 最后,根据(6)式即可得出PMSoS在各阶段任务的可靠度P(Sq)。 由2.5节中简化模型的原理,可以得到如表2所示的阶段代数运算规则。对于跨阶段基本任务,需要运用阶段代数处理阶段之间的相关性。 表2 阶段代数规则 BDD算法的求解流程如图6所示。 图6 BDD算法流程Fig.6 Flow chart of BDD algorithm 函数Computer(l)是主体部分,在其中调用specical_binary_tree(l)和Pathall(g)函数。下面给出算法的详细伪代码。 FUNCTION special_binary_tree(l): BEGIN g=nx.DiGraph() /*g为网络图结构*/ 将列表l中的元素在g中表示出来 return g END FUNCTION Pathall(g, A, B, visited, path, paths): BEGIN FOR A的每个邻居节点i: IF (A,i)在g中: 把邻居节点设为已经访问的节点 把(A,i)加入路径path中 Pathall(g,i,B,visited,path,paths) #递归 把邻居节点重置为未访问节点 清空path return paths END FUNCTION Computer(l) BEGIN l(parent node, child node, branch, probability, stage) g=specical_binary_tree(l) 从g中读取分支,概率和阶段表示 S=Pathall(g, root node,'0',visited nodes,path, paths) /*DFS得到所有成功路径*/ FOR 每条s∈S: IF 路径中有相同的节点: IF前面节点的分支为1&&后面的分支为0: LET 前面分支为1节点的概率=0 IF前面节点的分支为0&&后面的分支为0: LET 前面节点分支为0的概率=1 后面节点分支的概率不变 IF前面节点的分支为1&&后面的分支为1: LET 前面节点分支为1的概率不变 后面节点分支为1的概率=1 IF前面节点的分支为0&&后面的分支为1: LET 前面节点分支为0的概率不变 后面节点分支为1的概率=后面节点 分支为1的概率-(1-前面节点分支为0的概率) 每条成功路径的概率=路径上各分支概率乘积 probability.clear() /*计算下一条路径的概率时,清空上述赋值*/ 任务进行到各阶段的可靠度=每条成功路径概率之和 END. 假设护航编队执行某次护航任务的航行阶段、对海警戒阶段、驱离攻击阶段和返航阶段的开始时间分别为0 h、10 h、15 h和18 h,结束时间分别为10 h、15 h、18 h和30 h. 整个护航编队系统中,指挥、对岸通信、定位、机动和编队内部通信系统的寿命服从指数分布,故障率如表3所示。 表3 系统代号和故障率 直升机的寿命服从威布尔分布,m和η参数值如表4所示。 表4 系统代号和威布尔分布的参数 对于寿命服从指数分布的A、B、C、D、E、F、G、H、I、J、K、L、M,由于指数分布具有无记忆性,以A为例,所以A在任意时间段(tp,tq)内的失效概率为 P(Apq)=FA(tq)-FA(tp), (10) 式中: FA(t)=1-e-λAt, (11) λA为系统A的失效率。而对于寿命服从威布尔分布的N、O,以N为例,N失效会导致第3阶段任务失效,则N的失效时域为(t0,t3),则有 (12) 式中: (13) (14) (15) 且有 (16) (17) (18) fN(t)为系统N的威布尔分布失效概率密度函数,FN(t)为系统N的威布尔分布失效概率函数。且 (19) 计算得到各系统在各个阶段的可靠度如表5所示。 表5 各系统在各个阶段的可靠度 求得任务进行到各个阶段的可靠度P(S1)、P(S2)、P(S3)和P(S4)分别为0.989 1、0.981 6、0.985 4和0.974 4,则护航编队完成总任务的可靠度为0.974 4. 本文以护航编队为对象,开展复杂装备体系的任务可靠性分析。在PMS基础上,给出了PMSoS的定义。针对这种大型且各系统寿命服从不同类型分布的复杂任务体系:首先根据共同失效基本任务对阶段故障树进行化简;然后采用多阶段任务可靠度计算模型,并将不同时间段内同一系统的失效事件按照事件发生逻辑关系进行了合并处理,进一步降低了各阶段任务BDD计算的复杂性;最后利用算法编程得出总体任务以及总体任务进行到各阶段的可靠度,提高了任务可靠性分析的效率。 通过示例,进一步验证了本文所提出的模型和方法的正确性。结果表明,在假设的参数条件下,护航编队在警戒阶段与返航阶段任务可靠度相对较低,所以在规划整体的任务方案时,尤其要多方面论证该阶段方案的可行性,适时做出相应的调整。 事实上,大型武器装备体系涉及的平台和系统更多,逻辑关系更为复杂,主要体现在系统的动态可修、共因失效以及组合相关等方面,为了保证算法的求解效率,下一步将对复杂PMSoS的BDD构建过程中底层单元排序算法以及自动转化算法进行深入研究。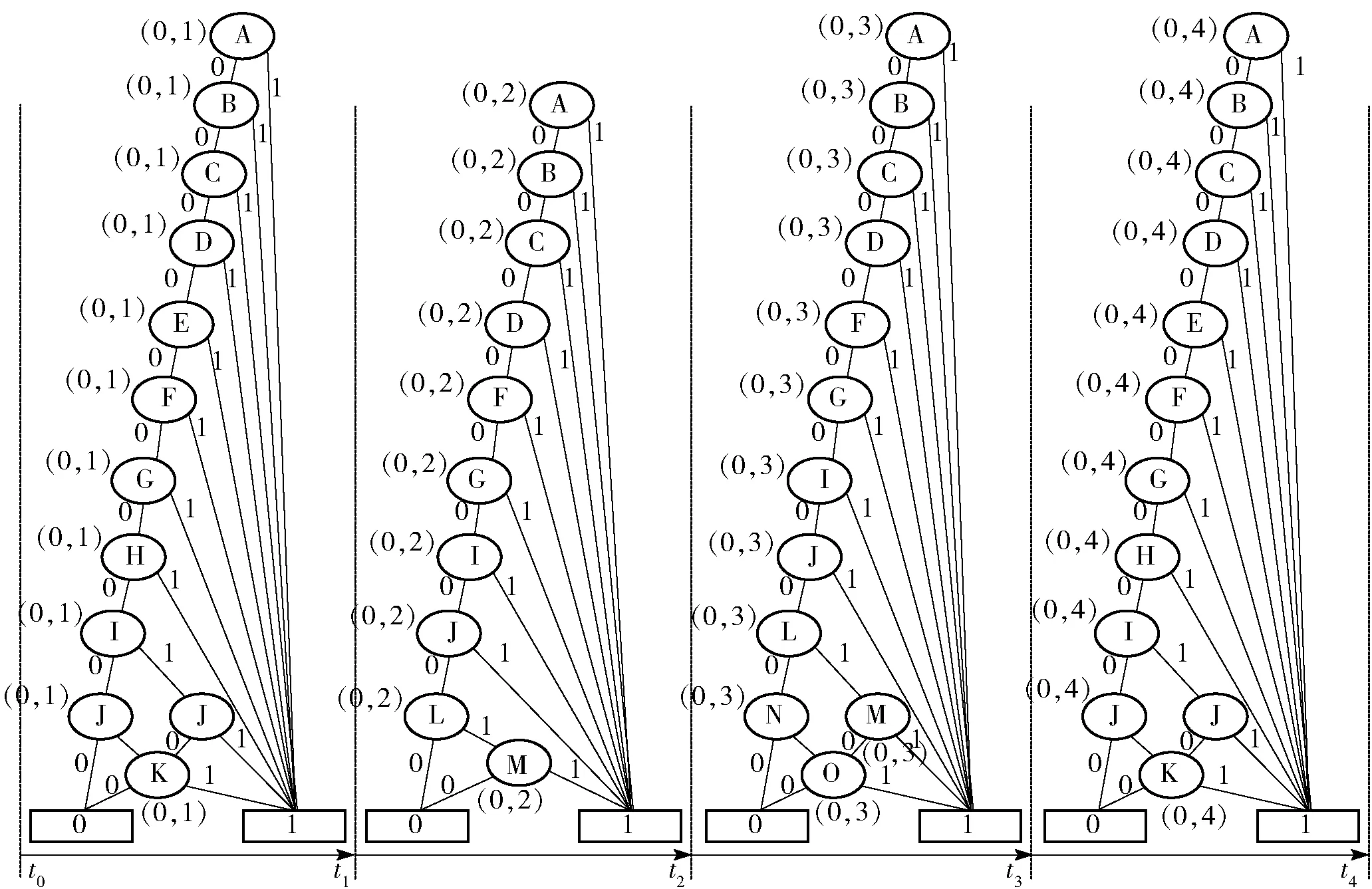
2.4 连接阶段任务 BDD得出Sq的BDD


2.5 简化模型
xy(max(tp1,tp2),min(tq1,tq2)),

2.6 算法流程及伪代码


3 示例分析


4 结论
