主动式活塞体积管流量标准装置阶跃特性研究
2020-06-17张毅治张永胜于华伟
张毅治,张永胜,于华伟
(航空工业北京长城计量测试技术研究所,北京100095)
0 引言
流量测量技术是伴随着科技工业快速发展起来的应用型测量技术,应用于石油、天然气等能源流体的贸易结算,也大量应用于工业过程控制、装备的生产和研制等方面[1]。随着科技的迅猛发展,动态流量的测量在产品的研发和生产过程中越来越重要[2-3]。
流量计的检定或校准试验过程,均是在稳态流量下进行,而流量计的实际工况往往比较复杂,可能在动态流量下工作,此时会产生动态效应的流量误差。另一方面,流量计的动态特性需要测试并量化评定。例如,在某型发动机燃油流量调节装置设计中,控制系统对燃油计量活门控制位移速度达到100 ms的量级,但是燃油调节装置实际流量的变化速度和变化曲线情况并不清楚,即所使用流量计测量结果并不能真实反映流量的动态变化曲线。因此需要在动态流量下对流量计的计量性能进行相关的试验研究。
航空工业北京长城计量测试技术研究所曾对文丘里管在脉动流量中的测量进行了理论分析[4-6],并使用主动式活塞体积管燃油流量标准装置,对容积式刮板流量计和科里奥利质量流量计进行了非稳态流量试验[7]。
为了进一步开展流量计的动态响应特性相关试验,本文使用激光干涉仪对主动式体积管燃油流量标准装置的活塞位移进行动态测量,分析该装置的阶跃流量特性,为未来优化装置的传动结构和伺服控制参数奠定基础。
1 试验装置
主动式体积管燃油流量标准装置是一种容积式流量标准装置,依据相关规程[8-10],该装置标准流量的扩展不确定度为U=0.05%(k=2)。该装置主要由电机及驱动器、联轴器、丝杠、导轨、体积管缸体及其活塞、阀门及管道、储油箱、温度传感器、压力传感器、过滤器、伺服控制系统、数据采集系统、控制计算机等组成。工作时,控制系统发出指令,伺服器驱动电机旋转,经联轴器和滚珠丝杠带动标准体积管的活塞移动并排除燃油,燃油经过控制阀门、被校流量计和过滤器后回到油箱,油箱里的燃油通过下游管道再回到标准体积管,与此同时,系统同步采集传感器信号[11-12]。该装置通过测量活塞的位移和对应的移动时间,得到标准瞬时流量。通常开展稳态下的流量试验。
由于体积管缸体的截面积已知,本次试验通过测量活塞的移动速度,可准确计算得到标准流量值,试验原理如图1所示。

图1 试验原理图
2 激光干涉仪
本次试验过程中,使用激光干涉仪动态测量体积管活塞的移动速度。该激光干涉仪的技术指标如表1所示。

表1 激光干涉仪的技术指标
测量光路如图2所示。光线1由激光干涉仪主机发出,进入分光镜后被分成两路光线:一路为测量光线2,另一路光为参考光线3;测量光线2在穿过分光镜后到达后方的反射镜,参考光线3在分光镜处折射到上方的反射镜;两路光线分别被反光镜反射回来,并汇合成一路干涉光4,最终返回到激光干涉仪主机,主机内的探测器可以监测到返回的干涉光,进而计算得到反射镜的距离。

图2 激光干涉仪的光路
试验时,在活塞杆上固定安装了分光镜和反射镜组,在地面固定激光干涉仪主机,对装置活塞杆的位移进行动态测量。在测量过程中,反射镜组随着活塞杆直线运动,激光干涉仪主机保持静止不动,发出光束并探测返回的干涉光束,计算得到活塞杆的位移。
主动式活塞体积管的活塞在启动位置静止,设定目标流量后开始启动,目标流量分别设定为1,2,10,50,100,200,400,600,800 L/min,使用激光干涉仪动态测量活塞的位移,活塞位移对时间求导得到活塞的速度。设置激光干涉仪的采样频率为10000 Hz。
3 试验结果
试验结果如图3~图11所示。纵坐标为目标流量的百分比,方形标记为阶跃起始点,圆形标记为装置达到63.2%目标流量的时间点,三角标记为装置稳定在(100±1)%目标流量的时间点。
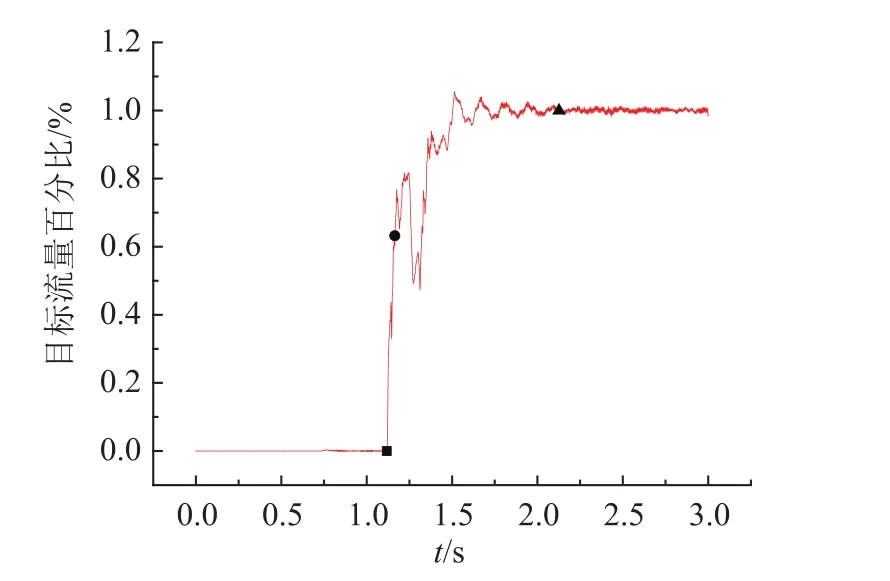
图3 目标流量800 L/min的阶跃响应

图4 目标流量600 L/min的阶跃响应
从图3~图11可以看出,主动式活塞体积管燃油流量标准装置在100~800 L/min的阶跃响应过程中存在明显的振荡和超调,而在1 L/min和2 L/min的阶跃响应过程中,持续震荡,稳定时间较长。不同阶跃流量下的时间常数和稳定时间如表2所示。

图5 目标流量400 L/min的阶跃响应

图6 目标流量200 L/min的阶跃响应

图7 目标流量100 L/min的阶跃响应
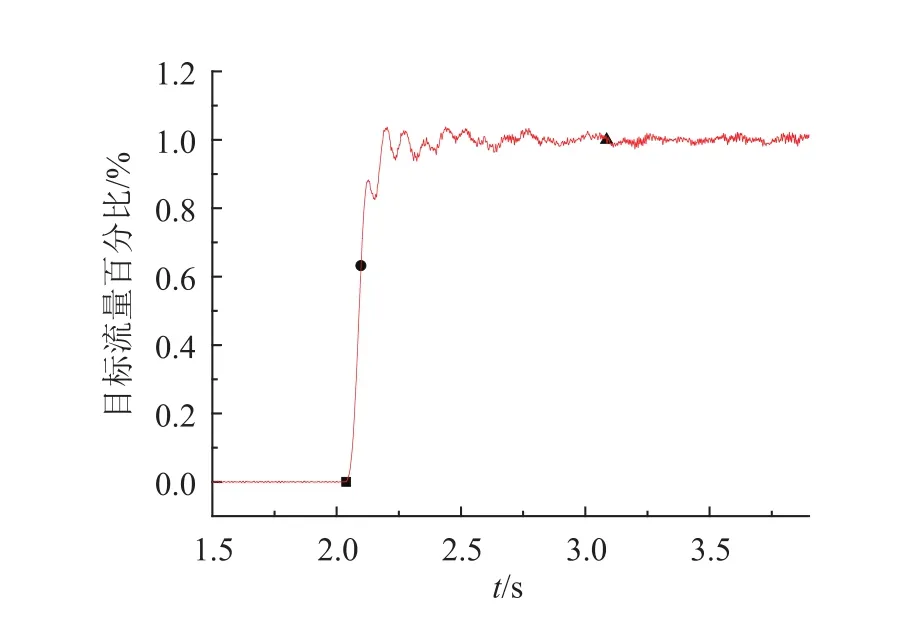
图8 目标流量50 L/min的阶跃响应

图9 目标流量10 L/min的阶跃响应
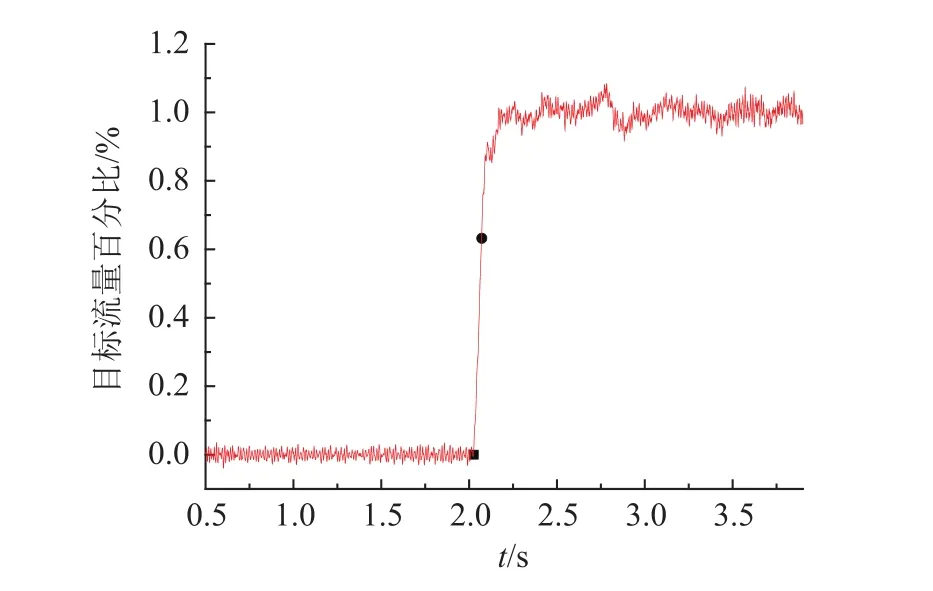
图10 目标流量2 L/min的阶跃响应
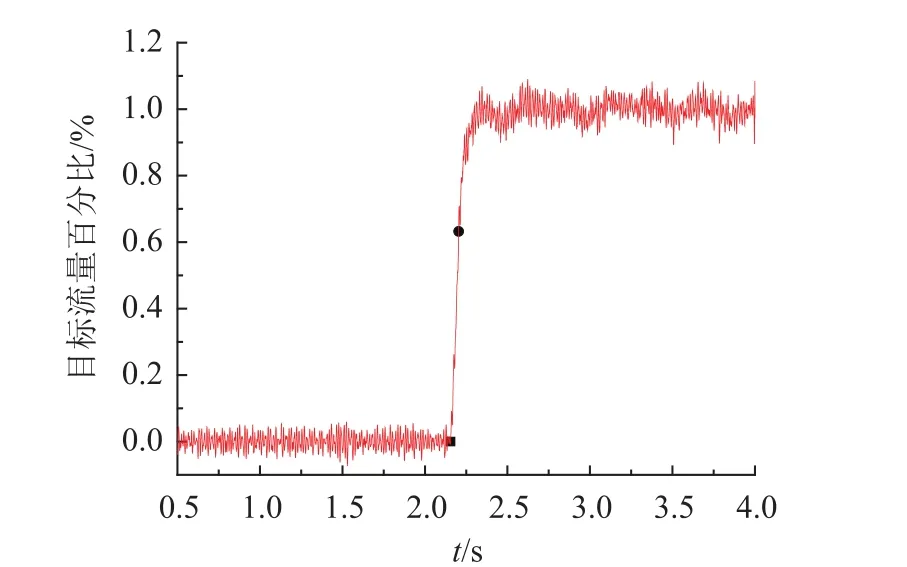
图11 目标流量1 L/min的阶跃响应

表2 不同阶跃流量的时间常数和稳定时间
由图12可以看出,主动式活塞体积管燃油流量标准装置在各阶跃流量下的时间常数在7~60 ms范围内,稳定时间随着流量的增大在1000 ms附近收敛。经初步分析,产生这种现象的原因主要是由装置的机械结构和控制系统性能所导致的。结构方面,该装置的伺服电机通过联轴器、丝杠导轨和活塞杆驱动活塞运动,各部件之间的间隙或者微小形变吸收了部分驱动力。在控制方面,该装置使用交流伺服电机产生流量源,装置的控制系统通过PLC及电机伺服控制器控制电机达到指定转速。控制过程中PLC输出的脉冲频率并非阶跃曲线,而是先由零阶跃到某一频率,然后按照一定加速比率逐步增加到目标频率,这个输出过程可以保护电机防止突然过载,但是平滑了阶跃曲线。
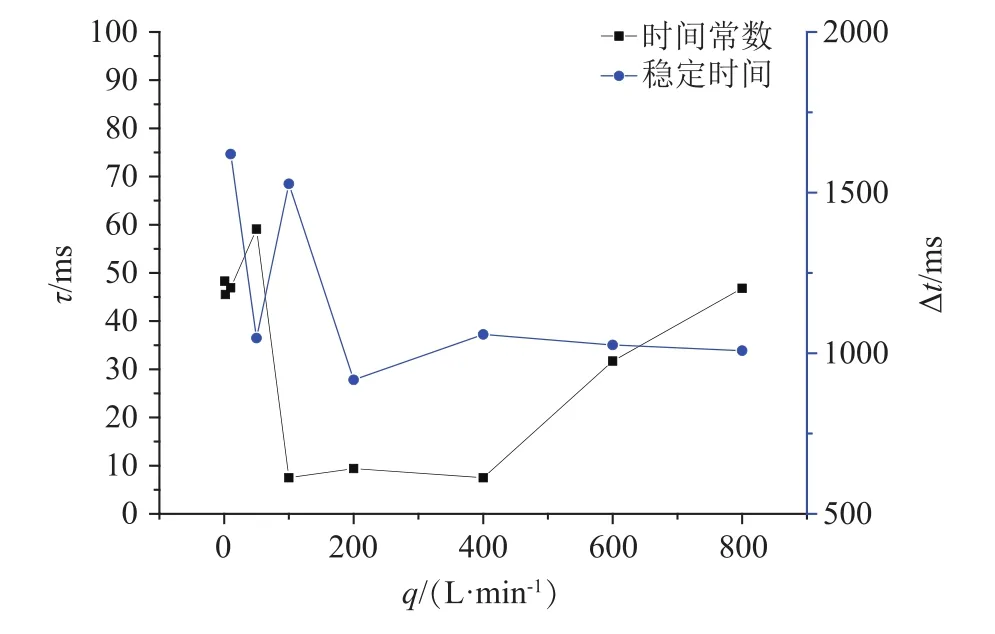
图12 不同阶跃流量的时间常数和稳定时间
4 结论
通过上述试验,主动式活塞流量标准装置从静止分别到1 L/min至800 L/min的阶跃流量的时间常数在7~60 ms范围内,部分阶跃曲线存在超调和振荡的情况;在0~100 L/min,0~200 L/min,0~400 L/min的阶跃流量的时间常数小于10 ms。
未来将优化主动式体积管流量标准装置的传动结构,并对PLC和电机伺服的控制参数进行调试,进一步优化装置的阶跃特性。在此基础上,开展流量计在阶跃流量条件下的误差试验,进行流量计动态特性研究。
