微型无人机三维倾斜摄影测量建模实验综述报告
2020-06-17
安徽交通职业技术学院 土木工程系,安徽 合肥 230051
0 引言
随着测绘技术日新月异,无人机三维倾斜摄影测量技术给测绘行业带来的新的转折点。三维倾斜摄影测量是基于无人机上搭多种传感器,对地物地貌获取空间地理及纹理等相关信息,通过后期建模软件进行实景重建,可生产出高精度实景模型及4D 测绘产品,它具有响应速度快,应用领域广,测绘成果多样化,为数字城市建设提供了载体,为数字化成图提拱了高效精准的模型[1-2]。三维倾斜摄影测量这项技术由于在高校实验环节还没有完全推广,故结合生产经验及相关的理论填写了这块空白。本实验用消费级单镜头4 旋翼微型无人机代替专业型五镜头多旋翼无人机进行实验,其作业原理都是一样,这样在高校实验教学环节中即达到教学的目又具有一定的安全性和经济性。
1 实验内容
(1)像控点布设;
(2)Altizure Beta APP 飞控参数及飞行航线设定;
(3)三维实景建模。
2 实验目的和原理
2.1 实验目的
(1)认识微型无人机三维倾斜摄影测量建模的意义及用途;
(2)了解微型无人机三维倾斜摄影测量建模的原理;
(3)掌握微型无人机三维倾斜摄影测量建模的内外业操作过程及建模后精度的评定。
2.2 实验原理
以无人机为飞行平台搭载相机及GPS/IMU(Global Positioning System/Inertial Measurement Unit)模块等多个传感器,对地面地物地貌采集1 个垂直方向和4 个倾斜方向的高分辨率的影像数据及准确的POS(Position and Orientation System)数据,包含了地物地貌空间地理相关信息及纹理信息等[3-4]。再通过Context Capture、DP-Modeler、Photo Mesh 等倾斜测量建模软件平台进行内业处理,从影像匹配、空中三角测量计算、密集匹配到三角网构建、纹理映射先后5个过程最终得到高精度的真实的三维影像模型及4D 测绘产品(DOM、DEM、DRG、DLG)[5]。
3 实验仪器
GNSS-RTK(Real-time kinematic of the Global Navigation Satellite System)1 套;大疆单镜头微型无人机御Air 1 套;电脑1 台;油漆;毛笔;三维建模软件Context Capture 1 套。
4 实验步骤
4.1 外业
(1)布设像控点:在建模区域的四角及中间位置附近布置像控点,点间距约100 米。像控点用油漆涂描成图1 形状或“L”形状,笔画宽度或圆圈内圆点直径约5cm,并写上编号,如图2,对不同角度进行拍照方便内业刺点。或网购成品像控点标志摆放到所选的位置上,如图3。

图1 像控点标志

图2 像控点标志
(2)测量像控点:GNSS(Global Navigation Satellite System)连接CORS(Continuously Operating Reference Stations),测量5个像控点大地坐标。
(3)无人机安检:打开DJGO 4 手机APP 软件连接无人机,自动进行无人机各项安全检查。如有红色提示表示某项功能需要校正或检查。
(4)飞控参数设置:打开Altizure Beta APP 软件,以高德影像地图为底图设定飞行范围;进入设置参数界面进行设定:航高40 m(确保最低安全高度及影像分辨率);航向、旁向重叠率85%(65%-85%)如图4;镜头倾斜角(1 个0°,4 个40°)如图4参数设置,自动生成5 条航线图,如图5 正拍航线、图6 前斜拍航线、图7 后斜拍航线、图8 左斜拍航线、图9 右斜拍航线。
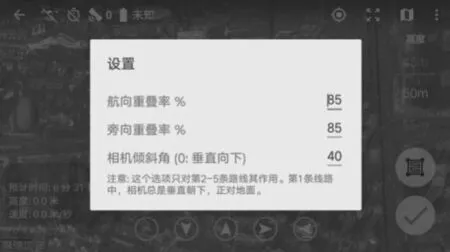
图3 参数设置

图4 正拍航线

图5 前斜拍航线

图6 后斜拍航线

图7 左斜拍航线

图8 右斜拍航线
(5)影像采集:无人机按照设定的航高,航向和旁向重叠率和镜头倾斜角进行5 条航线自动航拍作业,任务结束后自动返航到起飞点。
4.2 内业
4.2.1 数据导出:
将无人机拍摄照片及像控点坐标导入到电脑中。
4.2.2 数据处理:
(1)新建项目:运行Context Capture Center Master软件,建立工程项目。
(2)影像匹配:添加航拍照片,并自检像片是否缺失。
(3)添加控制点:打开添加控制点窗口,找到相应的像控点照片(至少相邻3 张)。准确刺点并输入外业GNSS-RTK 测量的大地坐标,并对投影带相关参数进行设置。
(4)空三计算:启动空三运算引擎软件Context Capture Center Engine,进行空三计算。
(5)实景建模:先进行自动密集匹配DSM(Digital Surface Model),再构建TIN(Triangulated Irregular Network)模型,并生成白模,再生成3D 纹理映射,最后自动生产真三维模型。
4.2.3 检查并生成报告
(1)通过报告检查空三平差精度
(2)通过三维模型可以量测若干个地物点距与现场对应的地物点距进行比对误差大小。
5 实验成果
实验结束后应提交以下资料:
(1)外业采集数据:航拍影像照片、像控点大地坐标文件、飞控参数设置记录及像控点布设时点位照片。
(2)内业处理资料:空三计算精度报告、三维模型osgb 格式文件及正身影像DOM(Digital Orthophoto Map)文件等成果资料。图10 为教学楼建模作业区域生产的三维模型成果。
(3)检查资料:三维模型上量取的地物点距与现场地物点距比对误差表。
6 实验注意事项
(1)作业前应查询飞行区域空管安全信息。
(2)无人机起飞前应检查4 个螺旋浆是否安装牢固,浆叶是否老化或破损。
(3)无人机打开电源前先打开无人机摇控器开关,停飞后先关掉无人机电源再关掉无人机摇控器开关。
(4)作业前一定要试飞30 s,目测无人机是否正常。
(5)起飞时和降落时无人机离人保持5 m 以上的距离。
(6)像控点测量时GNSS-RTK 对中杆一定要扶直,确保采集坐标准确。
(7)地面做像控点标志时一定要规范。
(8)内业像片刺点时一定要准确,相应的坐标值输入确保无误。