并联机构技术综述及专利分析
2020-06-15蔡桑妮
蔡桑妮
【摘 要】并联机器人具有刚度大、结构稳定、承载能力强、累积误差小、运动惯性小、运动学反解易求和便于实时控制等互补性优点。并联机器人机构构成方式灵活多样的特点使这类机器人结构不断翻新,在机器人领域中的专利申请量相对较大,本文将对并联机构的原理、发展现状以及并联机构的专利申请情况进行分析。
【关键词】并联机构;技术综述;专利分析
1.并联机构所属技术领域及其分类号分析
并联机构是一种空间机器人机构,属于机器人领域。其不同于其他机器人领域的针对具体实现某一作用的专利申请,有关并联机构的专利申请发明点多集中在以其能实现的运动学特性(如机构动平台所具有的不同自由度)或具体运动副结构上。有关并联机构的专利申请常被分类至机械手领域的B25J11/00、B25J17/00、B25J9/00以及其下的一点组,此外,其还有可能由于其具体的运动副结构或其具体作用被分至下列分类号。例如:以机械手领域为分类依据的B25J9/00,B25J9/08, B25J17/00,B25J11/00等;以所具有的运动副形式进行分类的B23Q1/00,B23Q1/25,B23Q1/44(包含其所有下位点组,特别是B23Q1/46, B23Q1/48);以具体应用领域为分类依据的B05B13/04(操作移动喷头)、A61B19/00(外科手术仪器或器械)等;以并联机构的控制为分类依据的G05D3/00等。
2.并联机构现有技术分析
2.1并联机构的运动学特性
自由度作为并联机构运动学上的重要参数,无论在其设计还是工程应用上都必须被首先考虑。因此,根据不同的自由度设计并联机构,成为很多专利申请的发明点所在。
运动副是确定空间两构件之间相对运动关系的主要限制因素,并联机构从运动学模型的本质上来说,就是各个运动副的组合,此类以不同自由度为发明点的专利申请,在评定其创造性时,可以选择将其由具体的机械结构简化为运动副,再从运动副的连接形式来从运动学本质上评价其是否具有创造性。组成空间机构的运动副有转动副、移动副、螺旋副、圆柱副、球面副、平面副以及虎克铰等。然而经过国内外长年以来的技术发展,对并联机构的结构设计已能基本满足了对各种自由度并联机构的需求,因此以其运动学特性为发明点,即以机构所具有的自由度为发明点的专利申请较难获得授权。
2.2并联机构的位置正解
运动学正解是研究并联机构许多问题的根基;在并联机构工作空间、奇异性分析、轨迹规划和反馈控制中起着关键的作用。一般形式的六自由度并联机床能够得到成功应用的并不多见,无法实时地计算运动学正解而不能形成机床全闭环控制是其中的一个重要原因。研究并联机构位置正解的文献以期刊居多,在专利申请方面,申请人倾向于提出位置正解较容易,能实现运动的输入-输出之间解耦控制的并联机构。以此类位置正解较为容易为发明点提出的专利申请,除了在自由度上满足了不同的作业需求,还能简化并联机构的控制系统,因此较之仅以能实现相应自由度设计的并联机构,此类专利申请更容易具有新颖性和创造性。
2.3并联机构的机械结构
除了将并联机构按其自由度分类之外,并联机构还可以按照动、静平台的连接形式可分为:杆支撑并联机构、绳牵引并联机构。
杆支撑并联机器人是并联机器人中最早被提出的,杆支撑并联机构的支撑及传动部件主要是液压缸、普通刚性杆、滚珠丝杠及其他的一些组合的刚性结构件。多数国内外的专利申请都采用了杆支撑结构,然而杆支撑并联机构的发明点大多不在其支撑杆的结构特性上,而是集中于其运动学特性、位置正解或控制等。
绳牵引并联机构是一种特殊的并联机构,绳牵引并联机器人是一种以柔性绳为传动和牵引机构的并联机构,绳牵引并联机构具有结构简单、重量轻易于进行结构变更等一系列优点。然而绳只能承受拉力,受力具有单向性,为了实现相同的自由度数的运动,绳牵引并联机构比杆支撑并联机构要复杂,很多绳牵引并联机器人需要靠重力形成闭环。绳牵引并联机构的这种特性使得刚性杆支撑并联机构的许多分析方法和结果不能够直接应用到绳牵引并联机构中,这导致在设计、规划和控制方面具有一定的难度。
钢带并联机器人是并联机器人中一种新的结构形式。它的传动和支撑结构为具有一定支撑能力的圆弧截面的不锈钢带。在一定的承载范围内,钢带并联机器人兼有刚性杆支撑并联机器人和绳牵引并联机器人的一些特点和功能,同时钢带并联机器人具有杆支撑和绳牵引并联机器人所不具有的优点。此类钢带并联机器人属于一种对并联机构机械结构进行的改进。
3.并联机构专利申请分析
3.1申请趋势分析
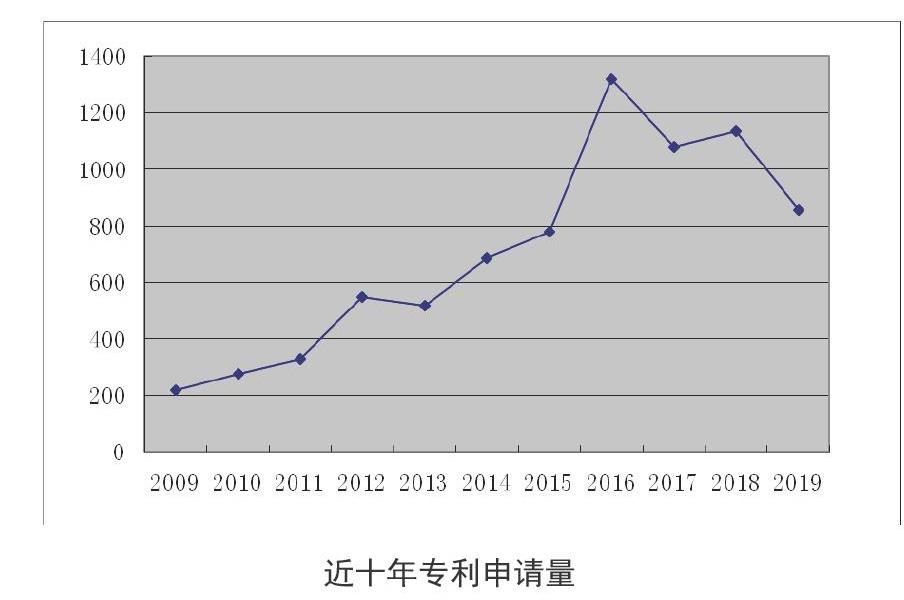
通过对申请日进行分析,并统计近十年有关并联机构的专利申请量。如下图所示,近十年有关专利申请量整体呈上升趋势,但在2016年后申请数量有所回落。在2009年至2011年期间,专利申请量较为稳定,申请量维持在200-300件/年,而到了20011年之后,有关专利申请量大幅上升,到2016年有关并联机构的专利申请量已达到了1320件。尽管相关专利申请量在2017-2019年期间有所下滑,其仍然保持在较高的一个申请数量。与之形成鲜明对比的是2009年以前有关并联机构的申请总量仅为852件,申请量的快速增长说明了近十年以来,国内相关研究机构也逐渐意识到了并联机构的重要性,相关研究日益深入。
近十年专利申请量
3.2申请人统计分析
通过申请人统计,可以得出在这些文献中申请量较大的申请人。申请量中排名前十的申请人均为高校申请,且这些申请人在近5年内也保持着较高的申请量,说明这些高校对并联机构的研究为持續性的,技术更新较为及时。同时,高校申请量远高于个人申请和企业申请表明我国对于并联机构的研究还属于基础研究的阶段,还未形成具有规模的产业化应用。
4.结束语
通过对并联机构的技术分析和专利申请分析,可以得出:并联机构是当今先进制造技术领域研究的热点,其应用范围广泛并不仅局限于某一技术领域;与并联机构相关的专利申请主要集中在对其运动学特性、位置正解以及其机械结构的改进;虽然近几年来针对并联机构的专利申请量增长迅速,然而其目前在我国的产业化程度不高,现有的研究主力为各大高校和科研院所,仍具有较广阔的市场发展前景。
参考文献
[1]苏先义.六自由度钢带并联机器人失稳有限元分析[D].杭州:浙江工业大学,2009.
