电力巡检机器人综合管理平台开发与应用
2020-06-15宋庆武王昊炜蒋超
宋庆武 王昊炜 蒋超

摘要:本文介绍了电力机器人综合管理平台开发,采用多级部署架构、统一接口规范、图像识别技术,实时掌握变电站数据及告警信息,能够快速定位出机房故障源,使机房监控从人工定期巡检维护的方式向机器人自动监控和管理的方式转变。通过对3电力巡检机器人综合管理平台的应用扩大应用区域巡检的范围,提高巡检的效率,对现场监测数据进行分析和整理,为全省综合监测管控体系提供数据支撑,提升省内数据监测及应用的水平。
Abstract: This article introduces the development of a comprehensive management platform for electric robots. It adopts a multi-level deployment architecture, unified interface specifications and image recognition technology to master substation data and alarm information in real time, which can quickly locate the source of the equipment room fault and make the computer room monitoring from manual periodic inspection and maintenance way to the way of robot automatic monitoring and management. Through the application of the integrated management platform of 3 electric power inspection robots, the scope of application area inspections is expanded, the efficiency of inspections is improved, and the on-site monitoring data is analyzed and sorted to provide data support for the province's comprehensive monitoring management and control system and improve the data monitoring and application level.
关键词:视觉分析;数据共享;多系统互动;知识库
Key words: visual analysis;data sharing;multi-system interaction;knowledge base
中图分类号:TM63;TP242 文献标识码:A 文章编号:1006-4311(2020)14-0205-03
0 引言
目前,我国电力工业发展迅猛,电力技术日新月异,信息化水平持续提升,人工智能技术得到了广泛的应用。现阶段,国内220kV及以下电压等级变电站基本为无人值守模式,500kV变电站为少人值守模式,将来也要陆续普及无人留守。变电站内监测对象众多,常规的在线监测安装范围有限,一些施工困难或危险区域往往难以监测,因此许多日常运维工作需要依靠人工巡检完成。站内存在大量的设备,且较分散,人工巡检工作量大,导致运维人员工作负荷和压力较大,特别是在电力管廊等工况复杂的环境中,更加增加了安全风险和隐患。
随着电网规模的不断扩大,近年来巡检机器人得到了广泛的使用,陆续取代了许多人工巡检业务,通过远程数据采集,对电气设备本体及其运行情况开展监测分析,包括了母线温升、变压器绝缘油各参量等。
1 总体架构
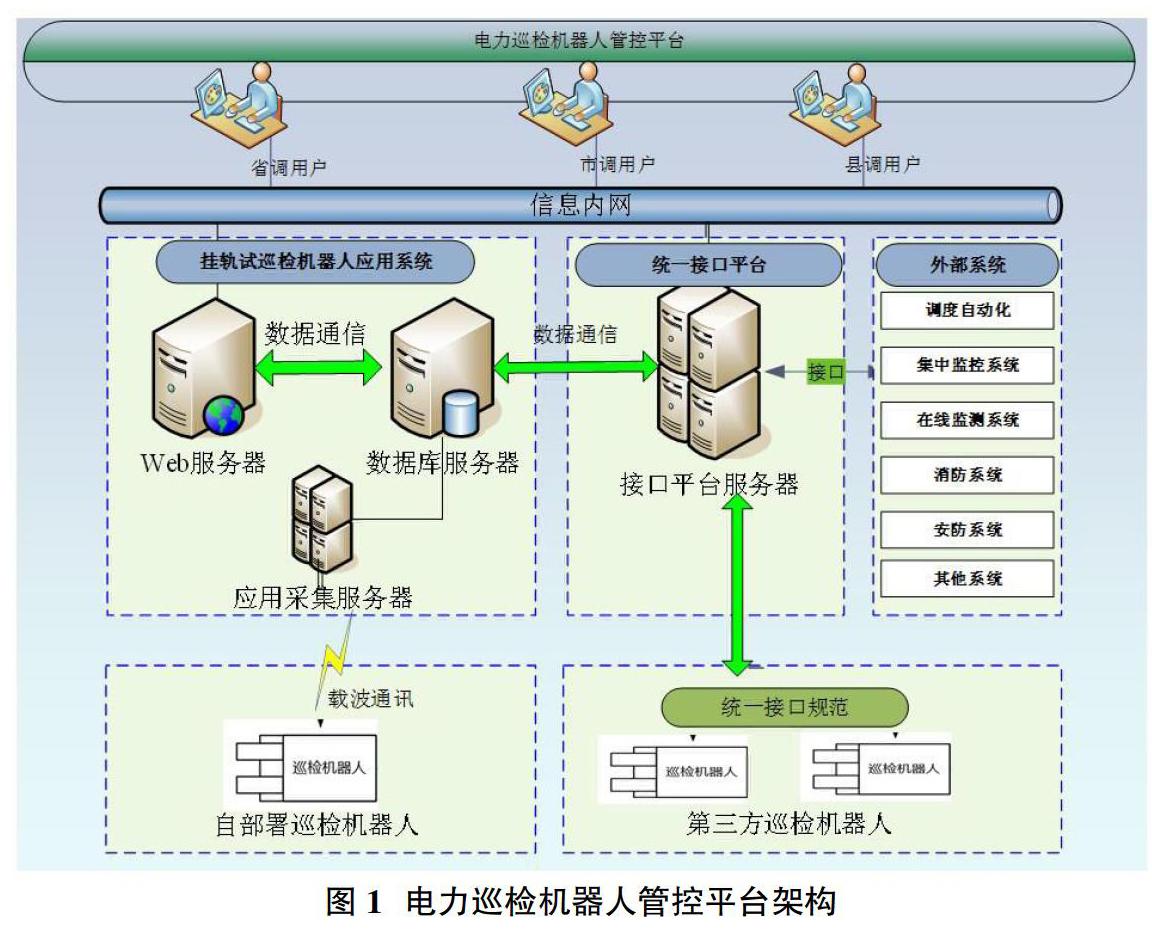
电力巡检机器人综合应用平台运行于数据管理的内部网络,由图1所示,它包含了应用系统、结构方案、具有自感应部署功能的巡检机器人本体以及第三方巡检部分等四方面内容。
对于应用系统而言,主要是采集数据的高级应用功能,包括储存、分析、显示、指令控制、状态研判等方面。具有自感应部署功能的巡检机器人利用电力通讯网络与接口保持对接,按照各项巡检任务和指令达到监测区域,收集信息上传至采集终端。第三方巡检部分和外部平台则是利用规范化接口构建巡检机器人本体与采集终端的双向通讯[3]。
按照平台业务功能和技术应用架构,详细整合其应用功能,按照平台物理层级开展技术应用功能的方案实现。巡检机器人一体化管控平台实现了两级部署,不仅实现了本地化运行需求,又可统一管理指定范围内的机器人,达到了数据统一储存、集中管控的目的。
2 業务功能架构
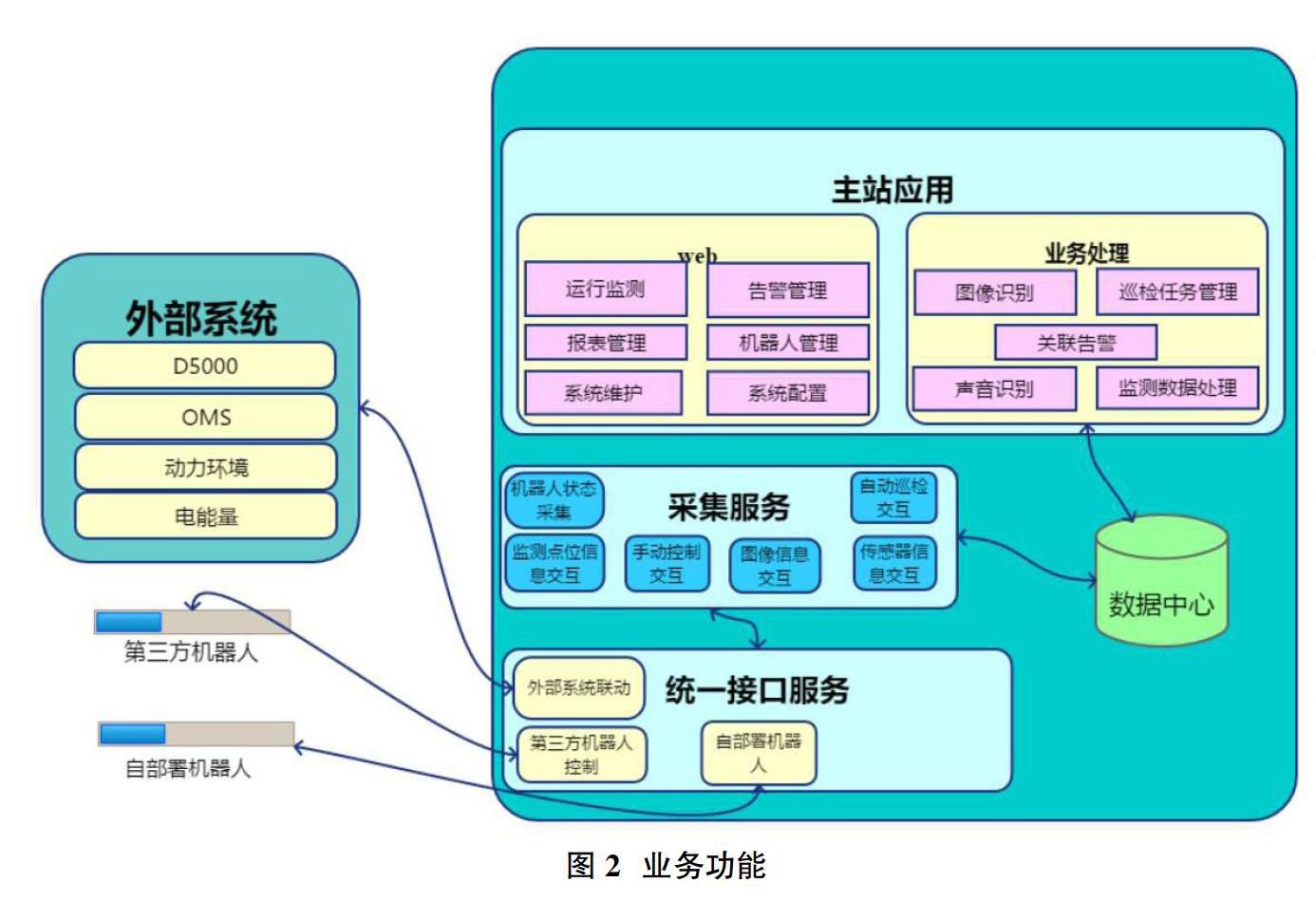
①电力巡检机器人一体化应用平台,满足超视距控制、多维度监测、运行状态实时评估的要求,实现站内多类设备告警显示、切换操作及表计数据智能研判,及时上送异常监测评估结果,规范接口协议,并具有第三方巡检设备可扩展功能,统一部署和管控。
②试制符合变电站工作环境的电力巡检机器人,具备各项工况参量的详细监测,能够达到站内智能巡检和分析研判的功能。
③事故数据及时上报及现场异常状态传输机制分析,满足各类情况的设备装置故障预测和状态评估要求的高级应用,为站内运维业务奠定坚实的数据基础[1]。
④以当前电力调度业务网络、辅助决策及实时监控平台的运行[2],实现系统间互动互通、数据共享,缩短告警处理时间。(图2)
3 图像识别描述
总体识别流程如下:首先以柜体为单位拍摄全景图,然后依次定位柜体上的各个仪表,并调整相机倍率和焦距(即二次对焦),拍摄待识别仪表的大图,最后根据仪表类型调用相应的图像识别算法,得到识别结果。
在二次对焦功能中,需要根据标定的模板从全景图中定位待识别的仪表,得到仪表的具体位置和尺寸,从而调整相机参数实现仪表大图的拍摄和后续识别。仪表按照识别策略大致可分为LED型仪表、指示灯型仪表、指针型仪表和机械状态型仪表。图像识别具体流程如图3。
4 统一接口规范描述
机器人以巡检点为基本巡检单元,每次巡检任务可巡检多个巡检点,即由多个巡检点任务序列组成一次巡检任务。设备内部使用数据库按照巡检点进行存储,主站侧需要报告时按规则进行查询,上传文件统一格式,文件存储在本地文件夹。控制命令采用104标准遥控命令执行,无需遥控选择,直接遥控执行,遥控值为1,遥控起始地址:0x6001,标识类型为:45(0x2D)。
5 总结
通过对室内电力巡检机器人及其管控平台的应用研究,研发机器人巡检管控平台,制定统一接口规范,将符合规范要求的第三方机器人产品纳入平台管理;结合省内现有监控类系统,研究巡检机器人在数据共享、告警联动等方面的应用。通过本文的研究,能够降低设备故障和动力环境变化对电网运行的影响;通过与安防、消防等系统的有机结合,更好的发挥巡检机器人在现场的作用,切实的保障电力安全生产,提高生产效率,减少财产损失、节约人力资源成本。
参考文献:
[1]Simon Haykin著.神经网络与机器学习[M].申富饶,等译.机械工业出版社,2011.
[2]朱涛,张华编.变电站设备运行实用技术[M].中国电力出版社,2012-02-01.
[3]李艳鹏,杨彪著.分布式服务架构:原理、设计与实战[M].电子工业出版社,2017.
