电动助力转向系统控制策略及其仿真研究
2020-06-12胡远想
胡远想
摘 要:我国在研究电动助力转向系统的起步时间较晚,但是随着我国这几年综合国力的不断提升,电动助力转向系统性能也有了大幅度的改善,但是目前我国制造的汽车在路试以及客户体验的过程中,电动助力转向系统普遍存在许多不足之处,这些问题的存在对汽车乘坐人的生命财产安全都产生了一定的威胁。基于此,制定出针对性的优化改善措施,对电动助力转向系统的构建结构以及工作原理进行了深入研究分析后,将复合控制策略的优点充分结合在电动助力转向系统应用过程中,有效保障了电动助力转向系统能够带给客户更佳的使用体验,保障复合控制策略准确性的同时,滿足电动助力转向系统操纵性能要求,有效解决低速时轻便性不够和高速时转向路感不强的问题,满足了人们对于生活质量和生活品质的追求。
关键词:电动助力转向系统;控制策略;仿真研究
我国科技水平在高速发展的同时也带动了现代电子控制技术和汽车工业的发展,但是环境污染、能源损耗等问题也逐渐加剧,随着人们对于生活品质和生活质量的追求,传统汽车转向系统供能方式已经被电能所替代,与时代发展中的环保、节能、安全三大主题所符合,更符合我国可持续发展战略提出的要求。目前,我国研发的电动助力转向系统已经成为了高新科技产业项目的一部分,这在一定程度上为我国电动助力转向系统提供了经济以及物质条件,为了实现汽行驶转向的便捷性以及保障汽车乘坐人的生命安全和财产安全,需要对电动助力转向系统控制研究,通过设定的控制策略和控制算法控制电机提供合适的助力矩[1]。
1 EPS研究现状分析
虽然我国在电动助力转向系统研究的起步较晚,但是几年我国科技水平的不断提升,电动助力转向系统的发展进步飞快,较多企业和高校实施强强联合,在电动助力转向系统的研究上也获取了较好地效果。EPS系统对于我国汽车企业的发展具有重要意义,因此为了增强我国汽车行业的竞争力,需要加大对EPS系统的研发程度。虽然我国之前对于电动助力转向系统控制策略有一定的研究,但是以往的电动助力转向系统控制策略研究的主要内容是电机的力矩控制。这些电动助力转向系统控制策略不能全面考虑系统的性能指标,因此,可使用性并不强。为了实现电动助力转向系统操纵性能要求,本文主要是针对EPS电动助力转向系统低速时转向轻便性不够和高速时转向路感不强的特点,提出一种复合控制策略[2]。
2 EPS系统复合控制器设计
2.1 电流环控制
运用电流环控制电动助力转向系统具有较为严格的要求,其中首要要求就是电机产生助力作用,而且电机产生的助力作用不仅要迅速、灵敏,还要与驾驶员的输入相匹配。因此这就对电流控制器提出了较为严格的要求,助力作用的灵敏、迅速主要与电流控制器有关,助力电机控制方式的好坏是电动助力转向系统性能的决定因素。电流控制器的主要作用是用来控制助力电机的工作电流以及响应目标电流的信号的作用,电流控制器也能对电动机的工作电流的速度以及准确性起到至关重要的作用,确定完目标电流以后,能够使电动机的工作电流更加准确的追踪以及响应目标电流。因此,在设计过程中选择一个合格的电流控制器能够起到有效控制工作电流的作用,对助力电机持续输出相对应的助力扭矩起到基础的保障作用。
PID电流控制器具有简单操作、可靠等特性,为编程提供了基础,目前,在电动助力转向系统中都是采用PID进行电流环节的控制,因此,在开展设计电流控制器的过程中也是采用PID控制方法。为了实现被控对象的有效控制,PID控制器通过对控制误差的比例、积分、微分这几个控制量进行控制。
2.2 助力控制
汽车助力控制电动转向系统的目标电流主要组成部分是由基础目标电流、惯性补偿电流以及阻尼补偿电流有效结合相构成的,基础目标在控制电动助力转向系统时不考虑方向盘的转角以及转矩的动态特性。目标电流值主要是通过助力特性而得出的电流值数据,转向转矩传感器信号以及车速信号提供相应辅助作用。设计过程中为了有效改善EPS系统对动态特性进行控制时,在设计制造过程中加入了惯性补偿电流以及阻尼补偿电流,对助力控制提供了一定的帮助作用。
3 仿真实验结果及分析
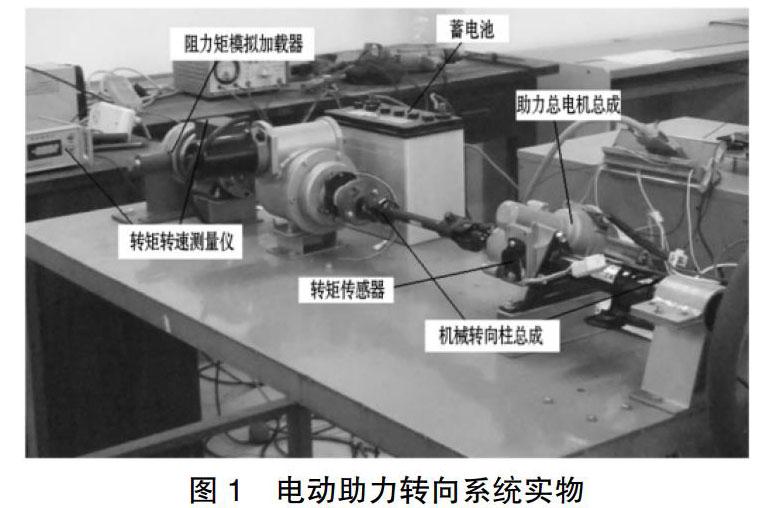
随着我国制造行业发展迅速的过程中,我国汽车制造业为了能够更好的满足人们对汽车发展的要求,车企在设计过程中将汽车转向系统的合理空间分布以及汽车前轴负荷量为主要考虑因素。现阶段的汽车转向系统大部分采用的都是轴助力设计模式,设计过程中将直流永磁电机来做为助力转向系统中的助力电机,转向系统中的减速机构采用的蜗轮蜗杆机构组合的方式进行设计,使直流永磁电机与减速机构两者进行有效结合的方式实现设计制造过程。如图1:
有效结合电动助力转向系统动力学模型,电动助力转向系统在仿真环节研究主要是分为传感器模型、转向输入轴模型、电机和转向输出轴模型、阻力矩模型、电机模型和电流控制器模型,助力控制系统Simulink模型图,模型中转矩信号Td采用阶跃输入,其值为3.6N·m,整定后的PID参数分别为KP=1.69,KI=30,KD=0.0035,系统增益为0.0175,此时系统动态响应σP=1.94%。
4 结束语
目前我国人们的主要交通方式还是以汽车为主,汽车的稳定运行对乘坐人的生命安全和财产安全具有重要的意义,因此,应该全面减少影响汽车稳定运营的因素,有效提升电动助力转向系统操作性能要求,针对电动助力转向系统,合理调节和控制运动状态,提升电机助力的准确度,有效保持汽车在行驶过程中的操纵稳定性。本次研究的电动助力转向系统控制策略充分结合了实际情况,为提升乘坐人的生命安全打下强有力的基础。
参考文献:
[1]方晖.电动助力转向系统故障原因分析与优化设计[J].南方农机,2020,51(09):123.
[2]夏金军.基于直流电机的乘用车电动转向控制系统研究与设计[D].江苏大学,2019.
