声速剖面仪测量技术综述
2020-06-12宋海润王晓蕾杨会兵
宋海润,叶 松,王晓蕾,杨会兵
(国防科技大学 气象海洋学院,江苏 南京 210000)
在我国大力开发海洋的背景下,对海洋要素观测、仪器设备研发的需求越来越迫切[1]。其中,海洋声呐设备是进行海洋观测的常用设备之一,其在经济开发、国防军事、科学研究、渔业生活等领域有广泛的应用。海洋声呐设备基于声波在海水中衰减小、传播距离远等特点进行探测,其精度主要受海水声速的影响[2]。因此,获取实时的海水声速剖面数据具有重要的意义。
目前,测量海水声速剖面的主要装备有声速剖面仪和温盐深剖面仪。经研究发现,现有的声速剖面仪测量的声速精度比温盐深声速剖面仪要高。我国正在使用的声速剖面仪是赵先龙[3]基于脉冲循环法设计的HY1200系列声速剖面仪,声速测量精度可达±0.2 m/s。国际上利用先进的“时间飞跃”技术研发了高精度的声速剖面仪,如AML公司的SV Plus系列。我国在经过几年探索后,伊凡等[4]研发了一种新型的声速剖面仪,声速测量精度达到世界先进水平。
本文主要介绍了声速测量的基本方法以及声速剖面的测量技术,论述了声速剖面对海洋探测的重要意义及其应用,并对国内外常见的声速剖面仪进行了介绍。根据目前高精度声速剖面仪普遍采用的声速测量方法,还对“时间飞跃”技术进行了概述。最后,结合我国常用的声速剖面仪,论述了声速剖面仪的检测技术。
1 声速测量方法
测量声速的方法一般可分为直接测量法和间接测量法[5]。
1.1 直接测量法
直接测量法是通过声波在某一海水深度处固定距离上的传播时间或相位,直接获得声波传播速度的方法[6]。具体的测量方法包括干涉法、脉冲时间法、脉冲循环法[7]。
以脉冲循环法为例,在海水介质中放置一个超声波换能器,其内部发射和接收为一体,在距离l的另一端放置一个反射面,超声波传至反射面返回被换能器接收,通过测量超声波往返n次的时间t来计算声速C,即用接收的回波信号去触发电路发射下一个脉冲,如此往复循环,该方法又称环鸣法[8]。计算公式为:

目前,脉冲循环法是最为常用的声速测量方法。该方法的声速测量精度可以达到亚秒级[9]。
1.2 间接测量法
海水中声速的值并不是一成不变的,它受海水各种环境因素的影响。大量的实验表明,海水中的声速是随着海水的温度、盐度、深度变化而变化。其中,温度每变化1℃,声速值增加约4.5 m/s;盐度每变化1‰,声速变化约1.3 m/s;深度每增加1 m,约增加0.1个大气压,声速增加约0.016 m/s[10-11]。
自20世纪50年代以来,科学家为了确定声速与温度、盐度和深度的关系,相继提出了不同的经验公式,共有10种。介于公式较多,不再一一列举,这些公式的适用范围如表1所示。目前。国际上较为常用的公式主要是Del Grosso公式、Wilson公式以及Chen-Millero公式[12]。其中,Del Grosso公式是最早提出的(1952年提出,1974年确定);Wilson公式被认为是较为稳定的公式。

表1 声速经验公式适用范围表
间接测量方法是根据海水中温盐深等参数,通过声速经验公式计算得到海水声速的一种方法。根据我国海区的水文要素分析,结合Wilson声速经验公式,《海道测量》规定了适用我国海区的国标经验公式[13]:

式中:T为海水测点的温度,℃;S为海水测点的盐度,‰;D为海水测点的深度,m。
2 声速剖面技术及其应用
声速剖面(Sound Velocity Profile,SVP)是指某一位置处声速随深度变化的水层切面,表示声速随深度的函数关系[14]。
2.1 声速剖面技术
声速剖面的测量实则是测量不同位置处的声速,依据声速测量方法的不同,也可将声速剖面测量技术分为两类。第一类是直接测量声速剖面的声速剖面仪,第二类是间接测量声速剖面的温盐深(Conductivity-Temperature-Depth profiler,CTD)剖面仪[15]。
声速剖面仪多采用直接测量声速方法中的脉冲时间法和脉冲循环法。两种声速剖面仪的共同点是都需要测量通过固定距离的时间;其不同点在于前者只需测量单次接收的时间,而后者需要测量多次接收的时间。声速剖面仪主要由换能器、计算机控制单元、时序控制单元、数据存储单元、传感器单元等组成[3],具体声速剖面仪组成如图1所示。声速剖面仪根据连接方式的不同,可分为拖缆式和自容式[16]。拖缆式声速剖面仪的水上数据处理设备和水下探测采集设备连接在一起,通过串口可以进行实时的通信;自容式声速剖面仪的水上数据处理设备和水下探测采集设备分离,数据存储在内部存储器内,完成一次声速剖面的探测后,再进行数据处理。

图1 声速剖面仪组成框图
连接方式的不同,也使得声速剖面仪的优劣各有不同。其中,拖缆式声速剖面仪可以提供实时的声速测量,但由于其缆长的限制不能满足深海测量的需要;自容式声速剖面仪虽然可以提供深海的声速测量数据,但是不能获得实时的数据。为此,余平等[14]提出了一种声速剖面遥测技术,其主要利用声速调制解调器对声速剖面仪测量的数据进行了传输。
利用声速剖面仪测量的声速剖面受两个因素的限制:一个是换能器与反射面之间的距离,另一个是在该距离上超声波往返的时间,其中传播距离是固定值,受产品需求的限制,其精度取决于制作的工艺和结构的稳定性。一般选择膨胀系数较小的材料来制作换能器的外壳,因此可以认为换能器与反射面之间的距离为理想的。要想精确计算声速,就需要精确测量超声波往返的时间。不同的声速剖面仪测量的精度不一样,详见下一节典型的声速剖面仪。
CTD剖面仪主要是测量海水中的温盐深等要素,利用声速经验公式计算得到声速剖面。在CTD剖面仪中,温度传感器、电导率传感器和压力传感器是水文要素测量的关键部件。其中,CTD剖面仪搭载的温度传感器主要有铂电阻和热敏电阻两种类型,电导率传感器主要有感应式和电极式两种类型,压力传感器主要有应变式和硅阻式两种类型。
我国CTD研制起步较晚,处于发展较快但创新能力不足的状态。市场上,主要以欧美的产品为主,其中具代表性的有美国SeaBird公司的SBE 911 plus和德国SST公司的CTD 90M。目前,间接法测量声速剖面的设备不仅仅局限于CTD剖面仪,只要携带测量温盐深的传感器,均可进行声速剖面的测量,主要包括Argo浮标、自主式水下机器人、水下滑翔机等海洋观测平台[17]。Argo浮标搭载浮标专用的CTD;自主式水下机器人是一个智能化程度高的水文要素探测装备;水下滑翔机是一个将浮标技术、潜标技术和自主式水下机器人融合的设备。CTD产品正在朝低功耗、模块化、智能化等方向发展,但由于间接测量法测量的物理量较多,计算得到的声速剖面误差较大,精度低。
2.2 声速剖面的应用
在对海洋进行探索的过程中,大部分海洋仪器依靠超声波进行探测,超声波传播的速度将会影响探测的精度。在某一海域中,声速测量的准确度将会直接影响超声波测深仪、声呐的性能,如单波束测深仪、多波束测深仪、海底地貌仪等[18]。在海水中尽管声速变化相对较小,但是在对远距离进行探测的过程中,不断积累的声速误差将会引起探测精度的恶化。因此,海水中声速是进行超声波定位与探测、环境监测和资源勘探等一系列活动的重要参数[19]。
不仅在民用方面有诸多应用,声速剖面的测量对武器装备等军用设备的影响也较大。在不同的区域和深度,鱼雷和潜艇的作战效果将会千差万别。负梯度变化的声速剖面将会使鱼雷反舰失效、自导距离缩短、跟踪目标不连续等[13];声速剖面达到负向最大时,将会使潜艇声呐的探测距离最小,出现短时的失明[20]。
精确实时的声速剖面数据能够快速、有效地为超声波测深仪、声呐等水声设备校正测量误差。通过对多波束测深仪进行声线修正,可以获得准确的水深数据[21]。通过声速剖面的获得,可以预先地估计鱼雷的作用距离和潜艇声呐的探测距离,为军事作战、装备试验、演习训练等提供良好的保障[13]。
3 典型的声速剖面仪
在声速剖面仪的研制上,我国起步较晚,但进步较快,国产声速剖面仪主要以HY1200系列声速剖面仪为主,国外声速剖面仪主要以加拿大AML、英国Valeport等公司生产的声速剖面仪为主[7]。
3.1 国产常见声速剖面仪
HY1200系列声速剖面仪是国内生产的高精度声速剖面仪,由某海洋测绘研究所和无锡海鹰加科有限公司共同研制,并于2002年通过技术部门的鉴定,现已推广使用。HY1201系列在HY1200系列的基础上进行了改进,电源由原来的9V Ni-Cd电池更换为三节锂电池。HY1200和HY1201声速剖面仪采用脉冲循环法直接测量超声波在已知固定距离内的传播时间,从而计算得到声速,同时还携带压力传感器和温度传感器,可以测出声速剖面仪所在位置处的深度和温度[22],如图2所示。

图2 HY1200和HY1201系列声速仪
该系列声速剖面仪分为3种型号:A型为直读式声速剖面仪,需要配置电缆;B型为自容式声速剖面仪,数据接口为USB;C型为自容式声速剖面仪,数据接口为RS232接口。HY1200A和HY1201A主要用于水深在100 m以内的声速剖面测量;而HY1200B、HY1200C、HY1201B 和 HY1201C 主要用于水深在200 m以内的声速剖面测量,内置不挥发的存储载体,可储存4 000组数据。HY1200和HY1201系列声速剖面仪的主要特点为:能够显示并打印声速或温度剖面;可选择时间间隔或深度记录数据;探测的数据与HYPACK处理软件相兼容。
为了提高声速测量的精度,无锡海鹰加科有限公司基于“时间飞跃”(Time of Flight,TOF)测量原理,采用频率为2 MHz的超声波传感器,研制了HY1202和HY1203声速剖面仪,声速测量精度为±0.05 m/s,达到了世界先进的水平。HY1202声速剖面仪是一款测量海(江、河、湖)水深度在50 m范围内实时声速的表面声速仪。HY1202无搭载温度、压力传感器,集成灵活,外观呈流线型,可与多波束测深仪、AUV、ROV和潜艇等设备直接连接使用。HY1203声速剖面用于水深200 m内范围内声速的测量,内嵌高精度的温度、压力传感器,可精确测量声速、温度、深度。表2给出了海鹰系列常见声速剖面仪的技术指标。

表2 海鹰系列常见声速剖面仪的主要技术指标
除了海鹰系列声速剖面仪外,北京海卓同创科技有限公司开发了海卓SVP1500系列声速剖面仪。SVP1500系列声速剖面仪采用TOF测量原理进行声速测量,声速测量精度课达到0.05 m/s,集成高精度压力传感器,深度测量精度可达到0.15 m,指标达到世界先进水平。该系列声速剖面仪采用高性能的材料和先进的结构设计,拥有16 G的存储空间,具有重量轻、体积小、耐腐蚀等特点。
3.2 国外常见声速剖面仪
加拿大AML公司生产的SV Plus v2声速剖面仪是第一台采用TOF测量原理的声速剖面仪,较基于CTD计算的声速精度提高了5倍,声速测量精度达到了±0.05 m/s,并于2002年重新设计,提高了数据采样频率。作为AML公司的升级产品,X·Series系列仪器可以灵活搭配XchangeTM传感器头。XchangeTM传感器头是唯一可现场更换的传感器,提供了温度、盐度、电导率、压力、声速等传感器,根据用户的需要,可以随时随地将CTD转化为SVP,其具有设计灵活、使用方便、测量精度高等特点,如图3所示。
英国Valeport公司主要有3种型号的声速剖面:MIDAS SVP、MIDAS SVX2和 MINISVP,如图 4所示。MIDAS SVP声速剖面仪是世界上精度最高的声速剖面仪。MIDAS SVX2声速剖面仪是带有电导率的最高精度的声速剖面仪,可集成CTD探头。MINISVP声速剖面仪是最轻便的声速剖面仪,适用于ROV安装、小船作业、军事科研等。
MIDAS SVP声速剖面仪配有Valeport数字飞行时间声速传感器、高精度的温度补偿压阻式压力传感器和快速响应PRT温度传感器。MIDAS SVP使用分布式处理的概念,其中每个传感器有着自己的微处理器以控制、采样和校准数据。这些微处理器均受一个中央处理器控制,中央处理器发出全局命令并处理所有的数据。这意味着精确到同一时刻对所有数据进行采样,生成绝对精准的分布数据。表3给出了国外常见声速剖面仪的技术指标。

图3 XchangeTM系列传感器头

图4 Valeport公司声速剖面仪

表3 国外常见声速剖面仪的主要技术指标
4 “时间飞跃”技术概述
“时间飞跃”(Time of Flight,TOF)技术,又称回波测距原理,是世界上最先进的非接触测距技术之一[23]。目前,国际上常采用TOF技术进行声速的测量。其工作原理如图5所示:安装在声速剖面仪基座上的换能器向反射面发射超声波,遇到反射面返回后被换能器接收,通过测量声波的往返时间,便可得到声速[24]。

图5 TOF技术工作原理示意图
在TOF测量原理中,根据到达换能器的回波时间来计算声速[25]。经查找文献可知[26],测量TOF有4种方法,包括阈值法、曲线拟合法、双阈值法和相关检测法。
4.1 TOF测量方法
阈值法是测量TOF最简单的方法。在阈值处理方法中,TOF是回波振幅首次超过预设阈值τ的时间t0,如图6所示。假设回波中存在白噪声,τ通常设置为白噪声标准偏差的3~5倍。在当前实际的超声波测距系统中,阈值通常选在回波脉冲峰值以下的-20~35 dB之间。
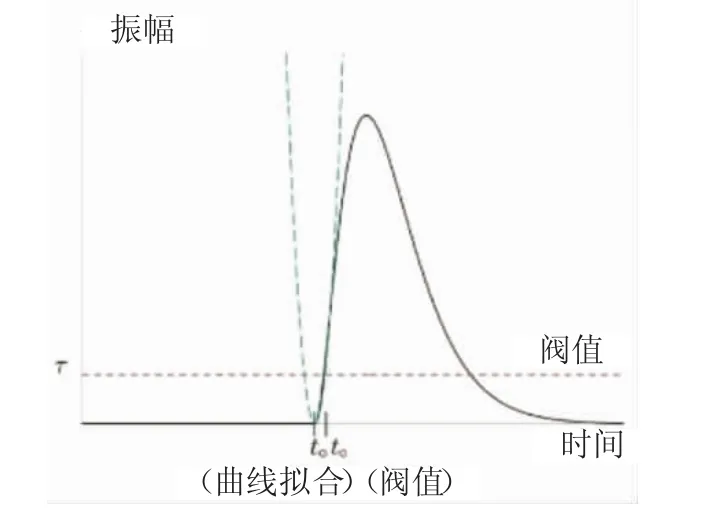
图6 阈值法和曲线拟合法的超声波回波包络的TOF测量
曲线拟合法是在超声波回波开始时通过最小二乘法进行非线性曲线拟合从而产生无偏TOF的一种方法。曲线拟合法常采用形式为a0(t-t0)2的抛物线,其主要包络从回波开始到回波上升沿周围的信号[27]。首先,通过阈值法找到t0的初始估计,并在阈值点附近的二阶导数得到近似a0的初始估计。然后,将两个参数的初始估计用于Levenberg-Marquardt非线性最小二乘法的初始化[28],并在阈值点附近采集50个回波样本数据,用于估计最佳拟合曲线的参数a0和t0。最后,获得的t0(其对应于抛物线的顶点)作为TOF,如图6所示。
双阈值法又称滑动窗口法。该方法源于最初为雷达信号开发的m-out-of-N检测,主要是为了使系统对噪声的检测更加稳定。其主要过程为:宽度为N的窗口一次一个样本地滑过回波信号,并且记录超过预设阈值τ的样本数量;如果该数量超过第二阈值m,则假设存在目标并且生成TOF估计。该方法的优点是其对噪声尖峰的鲁棒性,因为目标检测基于超过阈值的至少m个样本,而不是阈值法中的单个样本。
相关检测法受益于匹配滤波器技术在目标定位和识别中的应用,且其从回波信号中估计的TOF是无偏的。由于回波波形在传播过程中因衰减而变化,并且还随着目标的形状、大小和位置而变化,因此,要想确定接受信号中回波的最佳位置,匹配滤波器必须存储大量的回波波形。同时,该方法还需要相关算法,无论是在时域上还是在频域上实现,都需要大量的运算。除此之外,在经典相关检测法中还要求在产生估计的TOF之前观察整个回波。因此,该方法将会存在固有时间延迟。
4.2 TOF测量方法的对比分析
阈值法是一种最简单的实现TOF测量的方法,但其测量精度低、抗干扰性差。曲线拟合法具有最小的误差,而且还提高了系统对噪声检测的鲁棒性。双阈值法不仅可以达到最小的标准差,而且具有良好的鲁棒性,但该方法的性能取决于窗口的长度N和第二阈值m。相关检测法被认为是最精确的方法,但也是最复杂方法,实时性差。无论选择何种方法进行TOF的测量,都必须全面考虑系统的复杂性、稳健性、测量精度以及成本[29]。
4.3 TOF测量方法的实现
上述4种TOF的测量方法的硬件实现方法可以分为两类。第一类是通过计数器测量基准脉冲时钟的个数,来计算回波到达的时间,如阈值法和双阈值法[30];第二类是以高速模数转换器(ADC)采集回波信号并进行一定的减噪降噪处理,通过相关的信号处理方法得到回波的到达时间,如曲线拟合法和相关检测法[31-32]。
实现第一类方法,需要精确的时间间隔测量。时间间隔的测量方法主要包括直接计数法、时间间隔扩展法、时间幅度转换法、游标法、抽头延迟法、差分延迟法等[33-34]。目前,测量精确的时间间隔主要采用时间数字转换器(TDC)。Maxim公司设计的MAX35103低功耗数字转换器,时间数字转换精度高达20 ps。Texas Instruments公司设计的TDC7201数字转换器,内置两个TDC,分辨率可达55 ps。ACAM公司时间转换器种类繁多,有TDC-GP1、TDC-GP2、TDC-GP21、TDC-GPX 等,分辨率可达10 ps。AMS公司的时间转换器在市场中占据领先地位,主要有 AS650、AS6501、TDC-GPX、TDC-GPX2等型号,时间间隔可达零到几毫秒,且时间分辨率高于10 ps。实现第二类方法,需要高速采样的AD转换器。根据奈奎斯特采样定理,结合超声波换能器的发射功率,选择高速的ADC(>10 MSPS),如采样频率为80 MHz的AD9057、采样频率为125 M的AD9655。
Jingjing Du等[30]基于阈值法采用FPGA作为核心芯片,设计了一个SOPC的超声波测距系统,实现了软硬件的协同工作,显著提高了测距的精度。Wang Yuhui等[31]基于高速ADC模数转化器设计了一种新型时差法超声波流量计,采样深度可达到1 k字节,系统的整体性能得到了改善。Mike Asami等[32]使用一个16位的H8/3048F微型计算机,内嵌8通道的高速AD转换,设计了一个可用于工业机器人的超声波测距系统,测距误差小于5%。伊凡等[4]利用Acam公司开发的TDC_GP22高精度时间数字转换器制作了一种新型声速剖面仪,声速的测量精度可以达到0.03 m/s。
5 声速剖面仪检测技术
在使用过程中,因传感器受环境因素和自身漂移的影响,声速剖面仪的稳定性将会变差、测量精度将会降低[35]。为了保证其量值准确,就必须定期对声速剖面仪进行检测。声速剖面仪主要是对一定海域中的声速、温度、压力进行测量。因此,在检测过程中,要逐个对这3个指标进行检测。《海水声速仪检测方法》(HY/T 101-2007)结合海洋领域声速剖面仪的使用情况,在示值误差、重复性两个技术指标上对声速剖面的计量特性进行了规定,如表4所示。
5.1 声速检测技术
声速是一个导出量,无法直接复现其量值,需要通过间接计量法来复现声速的量值[36]。声速剖面仪的检测主要依赖于声速的两种获得方法:直接测量法和间接测量法。从相关文献和厂家提供的信息可知,换能器到反射面之间固定距离的相对精度不应低于声速的相对精度,声速测量的相对误差为1×10-4,换能器到反射面的距离为70 mm,那么距离的测量精度要优于0.007 mm,传播距离参量只能通过标定来获得[3,37]。然而,对于声速溯源的标准器的建立来说,在水下无法进行高精度的距离测量。因此,只能基于声速间接测量法中声速经验公式,通过测量水中的温盐深等要素来获得声速的标准值。窦春晖等[38]将纯水中的声速公式与两个海水中的声速经验公式进行比较分析,确定将纯水中的声速公式作为声速检测中的最优公式。纯水中的声速检测公式为:

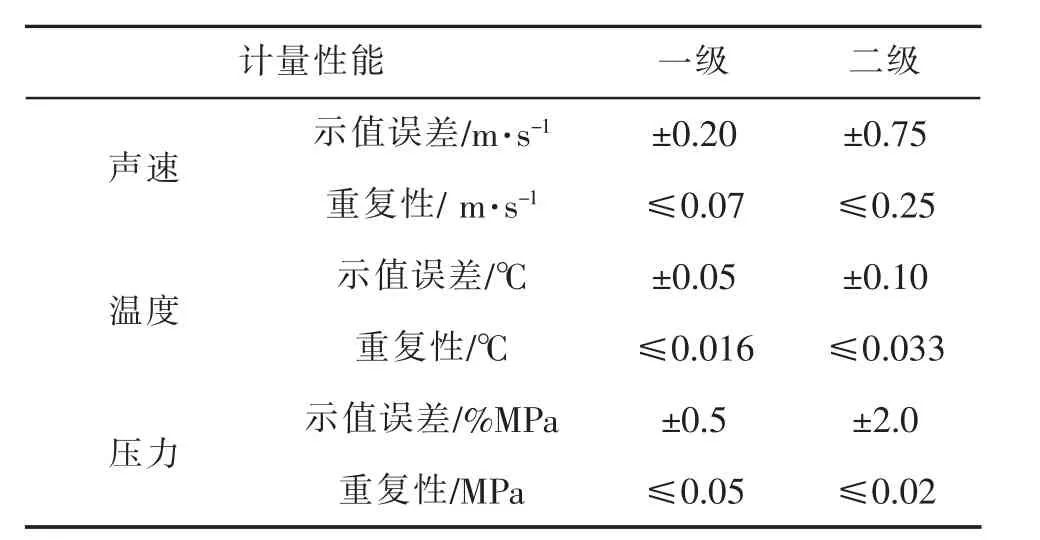
表4 声速剖面仪计量技术指标
式中:T为检测点的温度,℃。可发现,纯水中声速只与温度有关,与其他因素无关,纯水中控制声速简单可行,操作方便。
选择恒温槽、标准铂电阻温度计作为声速的检测设备。控制恒温槽的温度,在声速剖面仪温度测量范围内选择若干个合适的温度点作为检测点,稳定一定的时间,每个温度点进行若干次读数。同时,将标准铂电阻温度计的示值通过式(3)转化为声速值,计算每个声速点的示值误差和标准偏差评价其重复性。
5.2 温度检测技术
温度检测采用直接比对法。在声速检测的过程中,将声速剖面仪的温度传感器与标准铂电阻温度计放在同一水平面上,分别读取声速剖面仪温度传感器和标准铂电阻温度计的示值,计算每个温度点的示值误差和标准偏差,评价其重复性。
5.3 压力检测技术
压力检测原理采用直接比对法。选择活塞式压力计、压力泵作为声速剖面压力传感器的检测设备,连接活塞式压力计和压力传感器,在其压力测量全量程范围选择合适的点作为检测点,进行升降压的检测,记录数据,并计算示值误差和标准差。对于部分直接输出水深值的声速剖面仪,需要通过纯水中深度和压力的计算公式进行转化,如下式所示:

式中:P为水深对应的压力值,MPa;ρ为1990年国标温标纯水密度值,kg/m3;g为当地的重力加速度,m/s2;h为声速剖面仪测量的水深值,m。
6 结语
本文以声速测量方法为着眼点,对测量声速的国内外声速剖面仪进行了对比分析,着重介绍了现今世界上先进的声速测量技术——“时间飞跃”(TOF)技术,并结合声速剖面仪的构成,对声速剖面仪的检测技术进行了概述。目前,我国声速剖面仪技术已经达到世界先进水平,但部分核心技术还有待突破,如基于TOF技术的高精度声速剖面仪中时间数字转化传感器的研制。与此同时,随着我国海洋事业走向深蓝,为了得到更加准确的数据,还需要努力建立一条完整的声速剖面仪计量保障体系。