智能机器人在电网培训服务中的落地实践
2020-06-12国网浙江省电力有限公司培训中心王佳培李康宁
国网浙江省电力有限公司培训中心 王佳培 叶 碧 李康宁
智能机器人能胜任大部分简单、重复的工作,本文设计了一种适用于电网培训的智能机器人,使其拥有智能语聊、控制器、人脸识别、自主导航、后台数据管理、触摸屏交互、迎宾向导、培训助手等功能,为实现“数字化”、“智能化”校园提供有力支持,提高学员日常学习积极性,增加来宾来访参观的体验感。
1 培训服务机器人功能需求分析
为了使智能机器人满足电网培训的使用需求,基于移动终端、云数据库、人工智能等技术,制定如下功能。
智能语聊。智能机器人在培训中为学员提供考勤、应急呼叫、知识竞答等服务,为来宾提供迎宾向导,智能语聊是最主要的方式。因此机器人应具有语音识别功能,并能使用汉语、英语等语言与人进行交流。机器人应可以根据人的指令做出相应动作,如握手、敬礼、舞蹈等。智能机器人可根据来宾给出的指令,对培训环境进行引导参观和讲解。
控制器。开发适用于手机和平板电脑等移动设备的软件,实现对机器人的远程操作,例如绑定机器人、选择登录账号、控制机器人音视频内容获取、语聊功能网络内容加载、搜索与发送功能、语音转文本输入功能、控制机器人播报等。
人脸识别。人脸识别是智能机器人应具备的基本功能,学员考勤、身份认证等都需要通过人脸识别来完成。摄像头对学员或来访者进行面部识别,收集信息和特征提取,与人脸识别库中信息进行比对,判断人员身份,进行相应操作。
自主导航。要求机器人对参培学员和来宾进行引导讲解,自主导航是必不可少的功能。机器人可按照设定的路线进行移动,也可自主位移,有物体或人在行驶路线时可识别并重新规划路线进行避让。机器人通过传感器对培训环境地图进行建模,获取环境地图,画出移动路径。移动过程中机器人应以稳定速度前行,避让灵活。
后台数据管理。机器人需要与参培学员或来宾进行交流,解决问题,介绍培训信息等,因此应具备一定的信息存储功能,通过建立后台数据库,存储人员信息、培训资料、竞答知识题库等。后台管理系统可对智能机器人的各种数据进行添加、编辑、删除、保存、更新等操作,可根据权限开放账号,实现有效统一管理。
触摸屏交互。为提高机器人使用者的操作体验,装配高分辨率、尺寸合适、响应速度快的触摸屏,使用者按照屏幕显示的内容进行操作,机器人大部分功能都可以通过触摸屏指令来完成。
迎宾向导。迎宾向导是培训机器人很重要的一个功能。培训机器人可就培训缴费、培训环境、周边特色进行介绍,结合智能语音识别技术开展迎宾接待工作,为学员报到、外来人参观等提供向导。开发展馆向导模块,迎接并引导来访者按流程或针对性进行参观、讲解。
培训助手。针对电网培训开发培训助手功能:基于人脸识别功能开发考勤模块,为学员提供课堂考勤服务,减少考勤代签、代刷现象的同时减少班主任工作量;开发联络员模块,为学员提供应急呼叫服务,出现紧急情况可快速联系培训班负责人、当堂任课老师、医务室、保卫处等校园相关部门;开发知识竞答模块,实现题库导入、集训学员信息录入、建立个人学习档案、随机抽取题目(单遍题库不重复)考核学员、答案评判、错题集记录(可重复练习)、学员学习效果排名(答题数量、准确率等指标加权),课余时间帮助学员更好地学习记忆知识点,增强学习趣味性。
2 培训服务机器人功能解决方案
2.1 智能语聊模块
智能机器人的智能语聊模块包括智能问答、语音控制、自主讲解等(图1)。移动端拦截用户语音转换为文字,通过网络请求将语音文字发送给后台,后台经过匹配等处理后将回答返回给移动端,移动端接收后把问题回答播放出来。如果后台无相应的问题匹配,即返回回答的数据为空,移动端可将问题交给科大讯飞来处理或自行编辑几句,等待后台记录完善补充该问题之后,通过网络请求继续从后台获取数据。
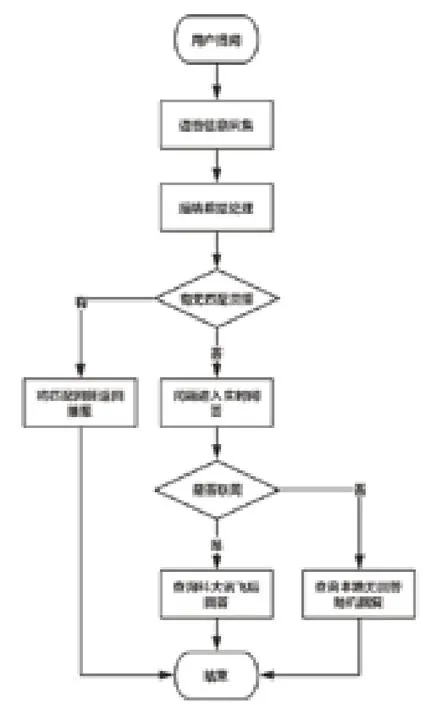
图1 智能问答流程
语音实时问答采用关键词匹配进行用户问答处理,提高用户采用不同说话方式时的识别率,实现更好的用户体验。如用户要去厕所可以说厕所在哪里、厕所怎么走、卫生间在哪里、洗手间怎么走等,关键词匹配只需抓取关键词厕所、洗手间、卫生间等就可进行模糊匹配,识别快速高效。
针对电网培训定制的移动端APP,采用多问一答的方式进行处理以提高识别率和用户体验:移动端对用户输入的语音进行拦截,将数据发送给后台,后台关键词匹配后返回给移动端数据后,移动端将匹配的回答播放出来。
2.2 控制器模块
随着人们对简单、便携需求的出现,借助于手机、平板电脑等移动终端开发的APP完美解决了这一需求,出色的便携性为智能机器人操控提供了更大的空间和更多的可能性。操作者可通过移动终端APP对机器人发出指令、设置参数。
基于移动终端等开发的APP帮助使用者远端操控管理机器人,机器人端与移动端控制器登录同一个账号,扫描二维码确认绑定,设备绑定后相应账号下的资源(业务问答、娱乐问答、轮播图片)和公共资源歌舞、舞蹈文件开始加载。数据加载完成后就可远程控制机器人说话,播放设定的歌曲或舞蹈,做设定的动作,展示设定的图片。登录账号下的私有资源,通过PC端的通用语聊库管理后台进行添加、修改或删除,公共资源如歌曲的舞蹈动作文件保存在机器人本地。也可在移动终端设置机器人的问答类型,使其更符合使用场景。
2.3 人脸识别模块
人脸识别已成为日常生活中最为常见的身份识别方式之一,广泛应用于人脸考勤、人脸支付、人脸解锁等领域,人脸识别的基本流程为:图像输入-预处理-特征提取-数据库比对-人脸识别。用户来到机器人摄像头前,摄像头对人脸进行拍照图像采集,采集之前先进行检测以防止光线过暗、位置较偏等导致人脸采集失败。然后对人脸进行特征提取,将人脸图像编码成128维的向量,再与人脸库中存储的128维向量特征进行对比,识别用户身份,得出结果后控制机器人做出相应指令。为保障人脸识别的准确性需要获取高质量的人脸图像,对摄像头的要求就较为严格,选取800万像素的专用于人脸识别的摄像头进行图像采集。
2.4 自主导航模块
自主导航是智能机器人“智能”的最基本要求,是机器人定点巡逻、迎宾引导的保障。为了使智能机器人在电网培训中心按照指定路线移动或是自由移动,需对所处环境进行地图构建。现在的智能机器人导航主要导航方式有激光定位导航、磁条定位导航、GPS定位导航、红外线定位导航、视觉定位定位、超声波定位导航等。
激光定位导航是通过智能机器人上安装的激光传感器发出激光信号,通过接收器收到激光从物体反射回的时间差判断方位和距离。激光定位的优点在于不易于受到光线等干扰,准确度高,但成本较高。智能机器人最常见的定位导航方式就是激光导航,因为它的高度聚焦性和良好的指向性,可很好的用于地图路径构建;磁条定位导航依靠在智能机器人行走路线地面铺设磁条与RDID标签来获得其行走路径。这种导航方式优点众多,外界很难对其造成干扰,使用寿命很长,获取路径精准,但是造价昂贵、成本过高,而且并不是所有场景都适合铺设磁条;GPS定位导航就是全球定位系统,是通过卫星与卫星信号接收器的距离来判断方位,通常用于车辆导航,而应用于室内智能导航机器人则不太合适,极易受到磁场和电场的干扰,地形影响大,定位不准。
红外线定位导航可测量范围广阔,响应时间快,但对于一些特殊物体无法进行检测,受环境干扰大,最小检测距离很大,成本较高;视觉定位导航应用到的领域十分广泛,在机器人上安装传感器和控制设备等,对经过的环境进行光学处理。但是视觉导航对光线的要求很高,实时性不好,而且要处理大量的图像,对计算机的要求也十分严格;超声波定位导航能识别一些其他传感器识别不到的物体,而且成本较低,但是精度与速度都不够好,受到环境及物体表面粗糙度影响很大。
综上,电网培训智能机器人选择激光雷达自主导航来完成环境识别、地形构建,再配合陀螺仪、超声波传感器及摄像头,保障机器人在培训中心内部实现自主导航的准确度,更好地为学员及来宾提供服务。
2.5 后台数据管理模块
为了更好地对智能机器人的数据信息进行管理需开发管理后台功能。智能语聊管理后台包括账号管理、问答管理、双语问答、统计分析,其中账号管理包含组织账号的添加、删除、编辑和重置密码功能,问答管理包括业务问答、分类业务问答、娱乐问答、实时问答、分类实时问答,针对使用场景和提问者的问题选择问答方式,统计分析中可看到问答转化量的柱状折线图、业务娱乐问答占比分析饼图及实时问答统计表格。控制器后台分别控制手机端和机器人端,机器人端加载音视频内容及智能语聊的问答播报。人脸识别后台可配置活动、人员信息,记录签到信息及使用记录等。
2.6 触摸屏模块
为提高用户操作智能机器人时的操作体验,需要配备一个尺寸适中、分辨率高、响应速度快的触摸屏,选用10.1寸的电容触摸屏。通过点击屏幕使用机器人的基础功能,改变基础设置,查询培训中心信息,知识竞答等功能,也可以在触摸屏上播放存储的图片、音频、视频文件,使机器人做出指定动作,自由移动或定点移动等。
2.7 迎宾向导模块
校园模块将校园信息录入机器人中,用户可通过语音交互或触摸屏幕与机器人进行交互,机器人播放图片、语音、视频向使用者介绍。在智能语聊后台添加缴费问题问答等,可直接与机器人进行问答交互。向导模块对校园内部进行地图建模,使机器人定点巡逻或根据指令前往指定地点,引导来访者参观,同时进行内容讲解和解答问题。
2.8 培训助手模块
考勤模块基于人脸识别建立学员人脸库,学员通过人脸签到,减少了代签现象,也便于管理,减轻教师工作量。在语聊库中选择竞答模式,选择题库,通过人脸识别验证身份,验证成功则错题可计入个人错题集,验证失败错题计入公共错题集。竞答设计倒计时,倒计时结束自动进入下一题,倒计时结束前可以答题,系统评判并提示答题结果。学员可随时选择退出答题,退出答题时可扫描二维码下载错题,方便手机查看。