地铁工程车行车安全监控系统
2020-06-11陈海林胡晨刘广鹏
陈海林 胡晨 刘广鹏
摘 要: 地铁工程车行车安全监控系统能够防护“两冒一超”、规范司机操作,实现了对工程车运用的安全控制。另外,存储在系统中的运行记录数据,可以使管理人员全面分析、监督驾驶员的操控过程,提高工程车的安全管理水平。
目前地铁工程车行车安全监控系统存在人员介入太多的缺点,如何提高系统的自动化水平和易用性成为当前的迫切课题。RFID(Radio Frequency Ldentification)技术,又称无线射频识别技术,可通过无线电讯号识别特定目标并读写相关数据,而无需在识别系统与特定目標之间建立机械或光学接触。RFID技术最早起源于英国,第二次世界大战中曾用于辨别敌我飞机身份,与20世纪60年代开始商用。该技术目前已是一种成熟的通信技术,广泛应用于物联网、交通、金融、门禁、食品等领域。
本文对地铁工程车行车安全监控系统中基于RFID技术的自动模式切换功能的实现方法、特殊情况防护、技术展望进行了阐述。
关键词: RFID,模式切换;定位;地铁工程车
【中图分类号】TN711 【文献标识码】A 【文章编号】1674-3733(2020)04-0197-01
1 场景需求
调车模式适用于在车辆段/停车场等无车载基础数据情况下的运行控制,实现对工程车的防超速控制功能。通常模式适用于工程车在线路上的运行控制。当工程车由车辆段/停车场进入正线时,或者由正线进入车辆段/停车场需要进行模式切换,以适用于不同场景对控制的要求。
人工切换,一定程度上增强了司机劳动强度,增加了错输、漏输的几率,且通常模式转调车模式需停车切换,影响运输效率。自动模式切换功能,实现模式切换的智能化,减少司机操作,提高了自动化水平。
2 功能实现
在出入段信号机处依次设置三个RFID标签,在工程车上安装RFID接收天线、接收主机、地铁工程车行车安全监控系统,当工程车在此三个标签上通过时,系统根据接收到标签信息及标签顺序实现模式的自动切换。
2.1 标签使用方法
地面标签,采用通用RFID标签,起内部存储包括,TID区(96Bit)、EPC区(96Bit)、可扩展用户区(512Bit);TID为出厂永久ID,此区域为只读区域,全球唯一;EPC为用户可编程ID区,此区域为用户ID;用户可扩展区域,为用户数据存储区域;
标签信息可使用TID区也可使用EPC区,此标签信息仅需保证在地铁工程车行车安全监控系统使用范围内的唯一性,地铁工程车行车安全监控系统即可根据此标签信息,查找预先载入的“标签ID-信息对应表”,确定该标签对应的具体信息。
2.2 标签布置要求
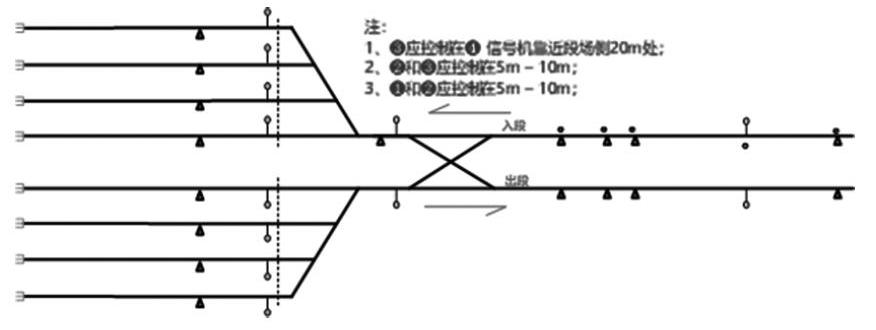
出入段信号机位置,铺设4个标签,靠近段场侧铺设3个(一组)的开车对标标签组,靠近正线侧铺设1个定位标签,考虑到RFID天线安装高度及扫描范围、标签功能、标签间的通讯防碰撞、机车车体长度以及标签铺设时现场可能存在的难点,标签铺设要求具体参见下图;
作用:考虑到出段、入段的开车自动对标功能,在出入段信号机处设置标签组;上图①为“出段设定”标签,对应信息有标签属性,交路号,车站号,线路行别信息;上图②为“开车0”标签,对应信息有标签属性,距出段信号机距离;上图③为“开车1”标签,对应信息有标签属性,距出段信号机距离;上图④为出入段信号机;上图⑤为“定位”标签;对应信息有标签属性,此处里程;
3 调车转通常自动切换
工程车出段上正线运行时,首先经过 “出段设定”标签,此标签对应信息中有该场段的交路号,车站号,以及线路行别信息,系统根据此信息完成自动设定;当工程车依次经过“开车0”、“开车1”标签后,系统即可确定工程车当前手柄方向定为出段方向,当工程车经过“开车1”标签时,系统根据RFID天线安装位置,判断机车头部距出段信号机距离,当此距离走完后,自动调用相应线路的正线运行数据,启动正线运行安全防护功能。
针对出段线太短,导致“开车1”距出段信号机太近,致使机车经过“开车1”时,机车头部已经越过出段信号机,而产生的几米误差,可在机车经过出段信号机外“定位”标签后,被校正。
4 通常转调车自动切换
工程车正线作业完毕入段时,工程车依次经过“开车1”、“开车0”标签后,系统即可确定工程车当前手柄方向定为入段方向,当机车经过“出段设定”标签后,系统将“出段设定”标签中的交路号、车站号与“出段设定”标签对应的交路号、车站号进行对比,当一致时,进入调车模式,不一致时,发出语音报警,提醒司机确认。
针对入段时,速度过高,导致通常模式进调车模式后,因限速的降低导致的制动,系统在检测到机车已经经过“出段设定”标签后,发出语音报警提醒司机,并弹出倒计时提示框,若在规定时间内,机车降为规定速度,或者司机按键确认,则无制动动作,否则输出制动,控制机车停车;
5 技术展望
RFID标签具有相对比较便宜,可大量布置,并且将标签对应数据存放在系统中,无字节限制,且当地面标签发生变化时,可直接对系统中的数据进行维护,维护方便。标签对应数据的可扩展性,
可以通过安装两套RIFD系统的方法,通过判断RFID天线接收到标签的先后顺序,确定机车是从标签的左刷过还是从右刷过,从而使用一个标签,即可确定机车运行方向;
同时通过加装两套RFID系统加上降低RFID天线安装位置,缩小扫描范围,调整RFID天线位置等措施,使两套天线的重叠扫描范围缩小到一定程度,当两套天线同时检测到标签时,再确定标签位置,此方法可将定位误差降至厘米级。
或者在只安装一套RFID系统的情况下,通过计算接收到标签信息和不能接收到标签信息的时间差,以及机车运行速度,以及标签信息接收延迟时间和系统处理延迟时间,计算出机车的精确位置。但此方法因限于上述两个延迟时间,机车速度不能过大,否则不能有效识别标签信息。
参考文献
[1] 基于RFID的车载定位定向技术研究与应用 [J].陈思,仲启媛,谭立龙,王鹏,张彦涛,邓昀,2019.
[2] 轨道设备RFID定位系统及典型应用 [J].成举炳,2018.
[3] 基于RFID的定位系统综述 [J].宋远峰,刘新,数字通信.2013(04).
