物料跟踪抓取试验台设计
2020-06-10毛也超王志永田维豪
毛也超 王志永 田维豪
(辽宁工业大学 机械工程与自动化学院,辽宁 锦州121001)
本设计旨在研究一种PLC 控制技术实验台,普及到各普通高等学校机电类专业,使学生通过训练完成特定的编程动作,使气动机械手在三轴龙门式直线滑台的带动下实现对物料的跟踪抓取。本设计还对设备关键零件使用有限元法进行了强度校核与分析,同时对所有设计部件进行了SolidWorks 三维建模以及事件驱动虚拟样机,验证了设备运行的平稳性与可靠性。该设计可以使学生完成关于物料跟踪抓取的动作编程练习,同时也不乏应用价值。经过完善后的动作可以作为包装机械的上料和运输的完全自动化生产线,也可以有其它应用价值[1]。
1 工作原理与主要装置
物料跟踪抓取试验台主要由5 个执行部分组成,分别是气缸上料装置,运输带装置,跟踪拾取装置,物料缓存器和运输链。本设计主要完成以上全部5 个执行部件的设计计算和选型。试验台的总体结构示意简图如图1 所示,两运输装置持续运行,旋转编码器持续采集转速信息[2]。物料随运输带运动到传感器位置,三轴龙门式直线滑台开始按照旋转编码器采集的速度信息跟物料的运动同步,当气动机械手下降到物料位置时,机械手闭合,抓取物料,放到事先设定好位置的物料缓存区中,完成了由动点到定点的抓取物料编程过程。当机械手上的传感器识别到物料缓存区中的物料时,Z 方向滑台下移,继而气动机械手闭合,实现抓取物料。当传感器识别到传动链上固定的塑料容器时,三轴龙门式直线滑台开始按照旋转编码器识别的传动链转速对塑料容器进行跟踪,直到同步运行。机械手接近塑料容器时张开,将物料被准确投放到塑料容器中,随传动链进一步运走,实现了由定点到动点的动作编程。机械手回到原点等待下一次上料后的跟踪命令。
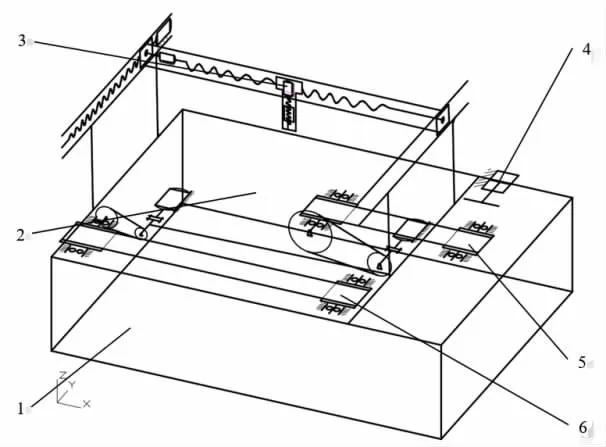
图1 物料跟踪抓取试验台装置简图
上料装置简图如图2 所示,经过设计计算、选型和3D CAD后,上料机构可以实现PLC 编程控制下的气缸按指定程序推出最底层物料,气缸活塞退回后,剩余物料随重力下落至推料盒等待下一次上料动作。
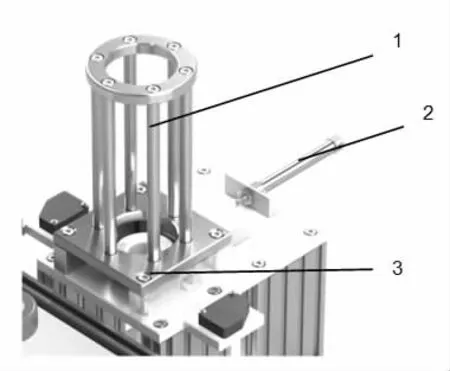
图2 上料装置简图
运输带装置简图如图3 所示,运输带装置采用的是带传送,由步进电机带动同步带传动再带动运输带。本课题第一次运输使用的是胶辊轴摩擦,带动橡胶运输带,运输带带动物料行走至恰当距离。由于胶辊与运输带之间有可调节的张紧,所以摩擦较大,加之物料质量较小,所以胶辊带动运输带可以满足同步要求[3]。
第一次运输的PLC 实验要求学生实现机械手从跟踪、抓取移动中的物料,再投放到物料缓存区的指定位置,培养学生“由动到定”的PLC 编程能力。
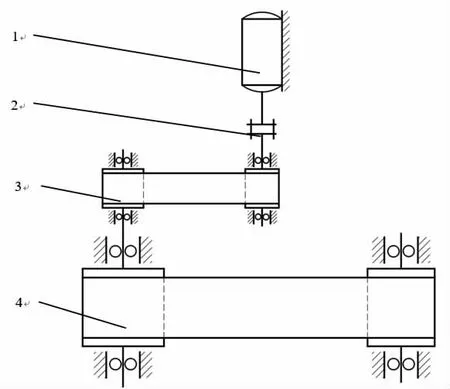
图3 运输带装置简图
运输链装置是在标准链条的基础上,将外链板非标定制成带孔的形状,链节不变[4]。4 个圆孔固定塑料容器,这样可以实现若干个容器定距离稳定运行,有助于实现从定点到稳定移动的固定点的跟踪抓取编程,如图4 所示。
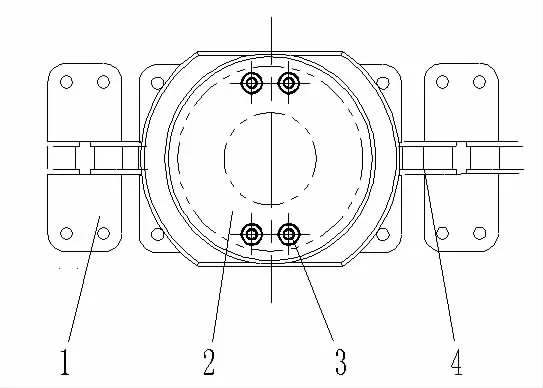
图4 运输链装置简图
2 主轴结构设计
第二次运输装置主轴结构如图5 所示,主轴总长178mm,左侧带轮用于输入扭矩,中间的链轮用于带动链,运输物料[5]。右侧轴头与旋转编码器相连,将转速实时传递给PLC,等待跟踪抓取时使用。
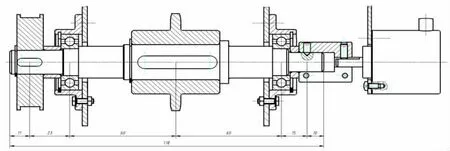
图5 第二次运输装置主轴结构图
3 结论
本设计研究了一种PLC 控制技术实验台,普及到各普通高等学校机电类专业,使学生通过训练完成物料跟踪抓取的编程动作。该设计除可以使学生完成关于物料跟踪抓取的动作编程练习外也不乏应用价值,经过完善后可以作为包装机械的上料和运输的完全自动化生产线,或其它应用价值。本次设计,可以使高校获得一种易保存、易维护、教育意义和科研意义强的PLC教学设备以供机械电子工程类专业日常实践教学,也可以使物料跟踪抓取动作逐步普及到企业的流水线。
