自动识别打击的智能电磁曲射炮系统
2020-06-10刘安彬向劲松
刘安彬 向劲松 张 江
(重庆交通大学 机电与车辆工程学院,重庆400074)
1 系统功能概述
本系统由STM32 控制模块、摄像头模块、电磁炮充放电模块、云台模块、电源模块、显示模块、激光测距模块等组成,系统硬件结构图如图1 所示。
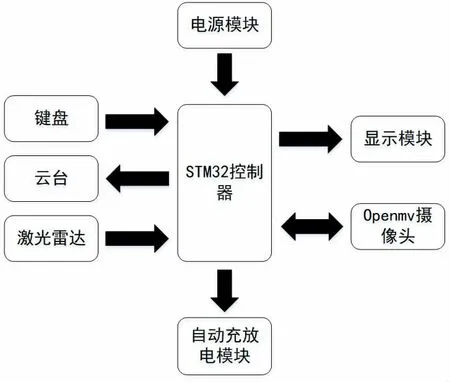
图1 系统硬件结构图
电源模块为整个系统供电;电磁炮自动充放电模块由继电器、逆变器等组成,通过继电器实现对电磁炮自动充放电;摄像头模块对目标进行初步识别,结合激光测距模块实现目标的精确定位;云台由舵机控制实现对电磁炮射击方向的控制;同时将相关信息发送给oled 显示模块,对一些必要信息进行实时显示。
2 系统主要模块设计
2.1 图像识别模块设计
对于标识物的识别主要是通过标识物具有的颜色与形状等特征点进行识别。本系统的OpenMV 摄像头采用三基色原理进行颜色识别,用基色光单位来表示光的量,任意色光F 都可以用R、G、B 三色不同分量相加混合而成,通过识别R、G、B 的值实现颜色判别。其颜色识别算法采用find_blobs 函数实现。同时本系统的形状识别是通过摄像头模块首先保存标识物的形状大小等信息,然后运行过程中通过提取图片中物体的特征点与保存标识物特征点相比较实现形状识别,其形状识别算法采用find_keypoint 函数实现。
2.2 电磁炮充放电模块设计
为了实现电磁炮自动充放电功能所设计的电路图如图2 所示。
电源经过逆变器转化为交流电再经过整流为电容供能,通过控制模块控制继电器实现对电容充电。当充电完成后收到发射指令就控制放电部分电路继电器闭合进行射击。
2.3 激光测距模块设计
激光测距原理是通过向前方射出一束很细的激光,由光电元件接收目标反射的激光束,然后测量激光在空气中行走的时间来精确计算出目标距离。本系统激光测距模块主要是使用锯齿波雷达激光测距原理实现激光测距功能。其测距原理如图3所示。
从图3 的原理图可得出本振信号的角频率在一个周期内的表达式并对角频率积分得到本振信号的相位为:

利用相位得到本振信号的函数然后经目标反射后被光电探测器所探测的发射光信号的角频率、相位得到函数表达式为:

利用拍频信号的电场强度并对拍频信号电场强度的相位进行求导,得到拍频信号的频率为:

最终得到距离公式:

3 理论分析计算
3.1 初始动能计算
电磁炮炮丸所含动能越大其发射距离也随之而增加,而电磁炮所含动能由电容所决定。电容储能公式为:W = 0.5CU�,由公式可知电容两端电压越高,储存能量越高。本系统选用逆变器将12V 输入电压转变成220v 电压,同时选用两个450V,1000uf 的电容并联作为储能元件,可知电容最大储能为W=48.4J。
3.2 弹道分析计算
根据电磁曲射炮发射状态分析,电磁炮射出弹丸的轨迹可运用物理抛物线计算出炮弹的弹道。通过分析弹丸轨迹,将炮管的倾角、抛射高度以及距离进行整合及运算。其弹道如图4所示。
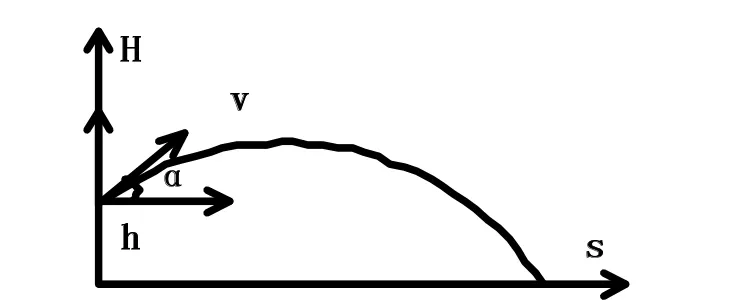
图4 炮丸弹道分析图
设炮管与水平地面的倾角为α,子弹刚出管口时的速度为ν,炮口相对于地面的竖直落差为h,加速度为重力加速度g=9.8N Kg水平速度与垂直速度进行求解如下:
炮丸落地所需时间t 为:

炮丸落地距离s 为:

结束语
本设计以STM32 为主控芯片控制系统正常运行,使用摄像头模块实现对标识物定位识别,用激光测距模块对标识物与电磁炮距离准确测量,并且将电磁炮架设在舵机驱动的炮台之上实现对标识物打击,使用继电器实现弱电控制电磁炮的充放电,最后还使用矩阵键盘与显示模块实现电磁炮自动识别定位与充能打击功能。
