叉车属具夹紧力智能控制系统
2020-06-10方锡岗周孟然胡锋孙磊
方锡岗 周孟然 胡锋 孙磊
(1.安庆联动属具股份有限公司 安徽省安庆市 246001 2.安徽理工大学 安徽省淮南市 232000)
叉车属具[1](Forklift Truck Attachment)是装卸、堆垛和搬运的高效自动化设备。随着仓储货运额的不断增加,工业中也就需要面对各种不同重量的货物,并且搬动,堆垛情况各异,传统的机械式四档调压阀存在调节压力固定,只能进行四挡固定压力值的输出,逐渐不能满足日益增长的需求[2][3][4]。对此本文设计一种更加精确高效的叉车属具夹紧力智能控制系统,能够通过阀的开度,根据流过油的流量来改变对应的压力,进行液压的反馈控制,经过优化后最终可以达到叉车属具的无极调控从而改变叉车属具的夹紧力大小。
1 系统总体方案设计
针对现有的机械式调压阀(大多数为四档,也有其他的多档调压阀)存在的压力固定方面的不足,仓储货运行业对叉车属具夹紧力提出了更广范围的调节压力以及更加智能化、高效化、人性化的操作方式,同时也要保证高精度。正是因为工业现场需求的不断增加,同时考虑到电气化(电气设备)的高度可控性,叉车属具夹紧力的控制必须采用电气化的配置方案,这样可以实现更多压力等级的控制(即更多的档位),经过优化后最终可以达到叉车属具夹紧力的无极调控。
本文设计的叉车属具夹紧力智能控制系统是由STM32F429主控模块和几大主要模块构成。STM32F系列核心模块保证能实时对采集、输入数据进行处理,准确输出压力。本设计采用人机交换界面控制系统,实现夹紧力的自动控制,通过触摸屏幕上的图形按钮,借助液晶显示画面制造出生动的影音效果。系统的结构图如图1所示。
2 系统硬件设计
叉车属具夹紧力智能控制系统的硬件设计对整个系统正常运行至关重要,系统中的每一个硬件模块都发挥着各自不同的作用,想要让所有硬件协调工作,STM32F429做为核心模块起到至关重要的作用,相当于大脑的功能,他将多种电路模块结合在一起,形成了完整体系的叉车属具夹紧力智能控制硬件系统。
2.1 STM32F429模块
本设计的叉车属具电控系统,采用人机交换界面控制系统,实现夹紧力的自动控制。STM32F4是由ST(意法半导体)开发的一种高性能微控制器[5][6]。其采用了90 纳米的NVM 工艺和ART(自适应实时存储加速器,Adaptive Real-Time MemoryAccelerator™)。STM32F429系列芯片[7][8]内部有一个LTDC液晶控制器,可以实现液晶面板的直接控制,无需额外增加设备;STM32F429系列芯片具有浮点运算单元。所以本文设计的叉车属具控制系统的微处理器采用意法半导体公司生产的STM32F4系列的STM32F429IGT6芯片。其芯片的引脚接线图如图2所示。
2.2 触摸屏

图1:叉车属具夹紧力智能控制系统结构示意图

图2:STM32F429IGT6引脚接线图
触摸屏[9][10](touch screen)是一种可接收触头等输入讯号的感应式液晶显示装置,接触连接触头以后,各种连结装置将通过屏幕上的触觉反馈系统按照已经设定好的程序被驱动,可以取代机械式按钮,并可制造出生动的影音效果。触摸屏作为新型电脑输入设备。它主要的特征有:
(1)透明,它可以直接影响到触摸屏的视觉效果;
(2)触摸屏具有一次到位的直观性,并且它属于绝对坐标系统,要选哪就直接点哪,与鼠标这类相对定位系统存在本质上的区别;
(3)检测触摸定位,大多数触摸屏技术主要是依靠各自的传感器来进行工作的。
通过工作的技术原理来进行区分[11][12],触摸屏一般可以分为矢量压力传感技术触摸屏、电阻技术触摸屏、电容技术触摸屏、红外线技术触摸屏以及表面声波技术触摸屏这五大类。本系统使用的数字液晶屏为深圳斯坦德科技有限公司生产的7寸TN92型液晶屏,可以在STM32F429系列芯片自带的LTDC模块完全驱动。本设计中所使用的7寸电容屏原理图如图3所示。
2.3 频率转电压模块
考虑到STM32的电压输出不稳定,同时驱动能力不足等缺点,本系统利用STM32自带的定时/计数器PWM模式,与比较寄存器相配合,输出脉宽可调的PWM信号,再通过PWM转电压模块从而达到稳定的输出电压。利用PWM波来实现稳定电压输出的关键是,首先应根据实际情况,确定需要输出的PWM波的频率范围。PWM波的频率越高,经过积分器输出的电压也就会越平滑。然后占空比的调节精度同样很关键,精度越高,经过积分器输出的电压也同样就越平滑。考虑到PWM波的本身是数字脉冲波的这一特征,其中含有大量丰富的高频成分,因此在使用过程中需要一个好的积分器,如有缘低通滤波器或者多节滤波器等。该PWM转电压转换模块,输入PWM波的频率为1-100khz,占空比为0-100%。输出电压为DC 0-10V,输入的工作电压为DC 12-30V,允许存在的误差为5%。电路原理图如图4所示。
该模块的主要技术指标如下:
(1)外形尺寸: 56 mm×26 mm×12 mm
(2)供电电压: DC 13-24 V
(3)输入频率: 0-500 Hz,0-1 kHz,0-10 kHz,0-100 kHz
(4)输出电压: 0-5/10 V
(5)输出电流: 5 mA
(6)响应时间: 300 ms
(7)环境温度: -10~60 ℃
该系统所用频率模块的实物图如图5所示,模块接线图如图6所示。
2.4 电源模块
电源模块作为嵌入式系统常用的电源供应器[13][14],其主要是用来为微处理器、微控制器、特定集成电路、现场可编程门阵列 (FPGA)、存储器及其他常用的模拟量或者数字量负载提供电能供应。一般来说,这类模块称为负载点 (POL) 电源供应系统或使用点电源供应系统 (PUPS)。由于模块式结构的优点甚多,因此模块化电源在通讯设备、智能仪表、工业控制以及航空航天等领域都有着广泛的应用。本系统需要的电源电压主要有2种类型:家用电瓶车产生出来的11-13V升压成24V给频率转电压模块,电磁阀驱动模块(电压转电流)以及电磁阀供电模块;另外一个将11-13V降压为5V的触摸屏模块和STM32F429主控制供电模块。11-13V升压成24V给频率转电压模块的电路如图7(a)所示,11-13V降压成5V如图7(b)所示。
3 软件设计
在前面的部分已经详细的介绍了叉车属具夹紧力控制系统的整个硬件电路的设计思路。但是众所周知一个性能优越的控制系统,不仅包含硬件系统,并且还包括软件系统,硬件系统是保证整个控制系统能够正常工作的基础,软件系统同时也是保证整个控制系统能够稳定运行的前提[15]。软件部分主要分为核心控制板和控制子板,其中核心控制板采用了STM32F429为控制芯片,控制子板包括显示屏、触摸屏等。当核心控制板上电之后,需要对系统进行初始化,根据实际的任务需求以此来确定叉车属具所需要的压力等级,通过触摸屏输入压力值并显示在人机交互界面即电容显示屏上;输出PWM频率波形经过比例放大,对输出电压进行控制,经过电压-电流模块,然后输出稳定电流控制比例溢流阀,从而实现控制压力输出。软件系统的主程序流程图如图8所示。
4 结论

图3:电容屏原理图
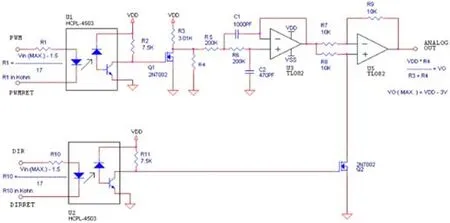
图4:频率转电压模块电路原理图
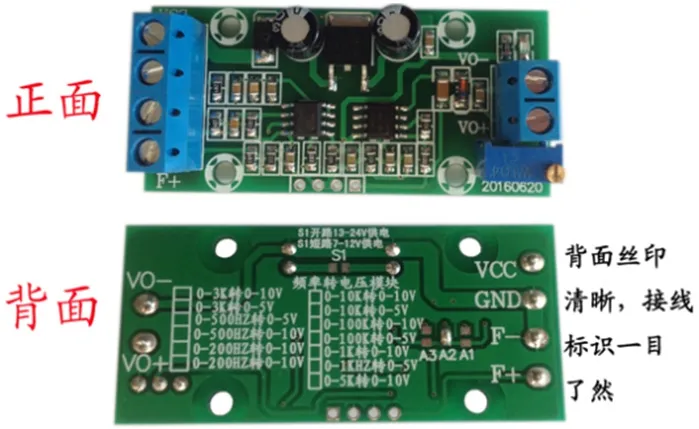
图5:频率模块实物图
本文设计的是一种叉车属具夹紧力智能控制系统,具体的实现方法是将传统的机械阀用比例电磁阀来代替,并通过微处理器实现比例电磁阀的闭环控制,并在系统中加入人机交互。该夹紧力控制系统由硬件设计与软件开发组成,硬件系统由电液比例溢流阀、STM32F429主控制单元、PWM转电压电路、电压转可控恒流源电路、电容触摸屏控制系统;软件系统主要是对输出产生的PWM信号进行输出控制,以及处理从触摸屏得到的输入,完成从触摸屏的显示输入到输出压力全过程的控制。相比较于传统使用人力控制的叉车属具,本产品主要实现了以下功能:
(1)实现了通过人机交互控制叉车属具压力快速精准输出;
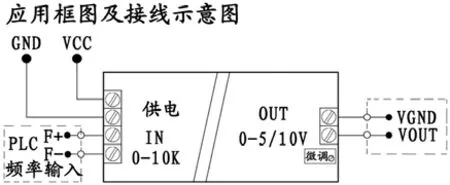
图6:模块接线原理图
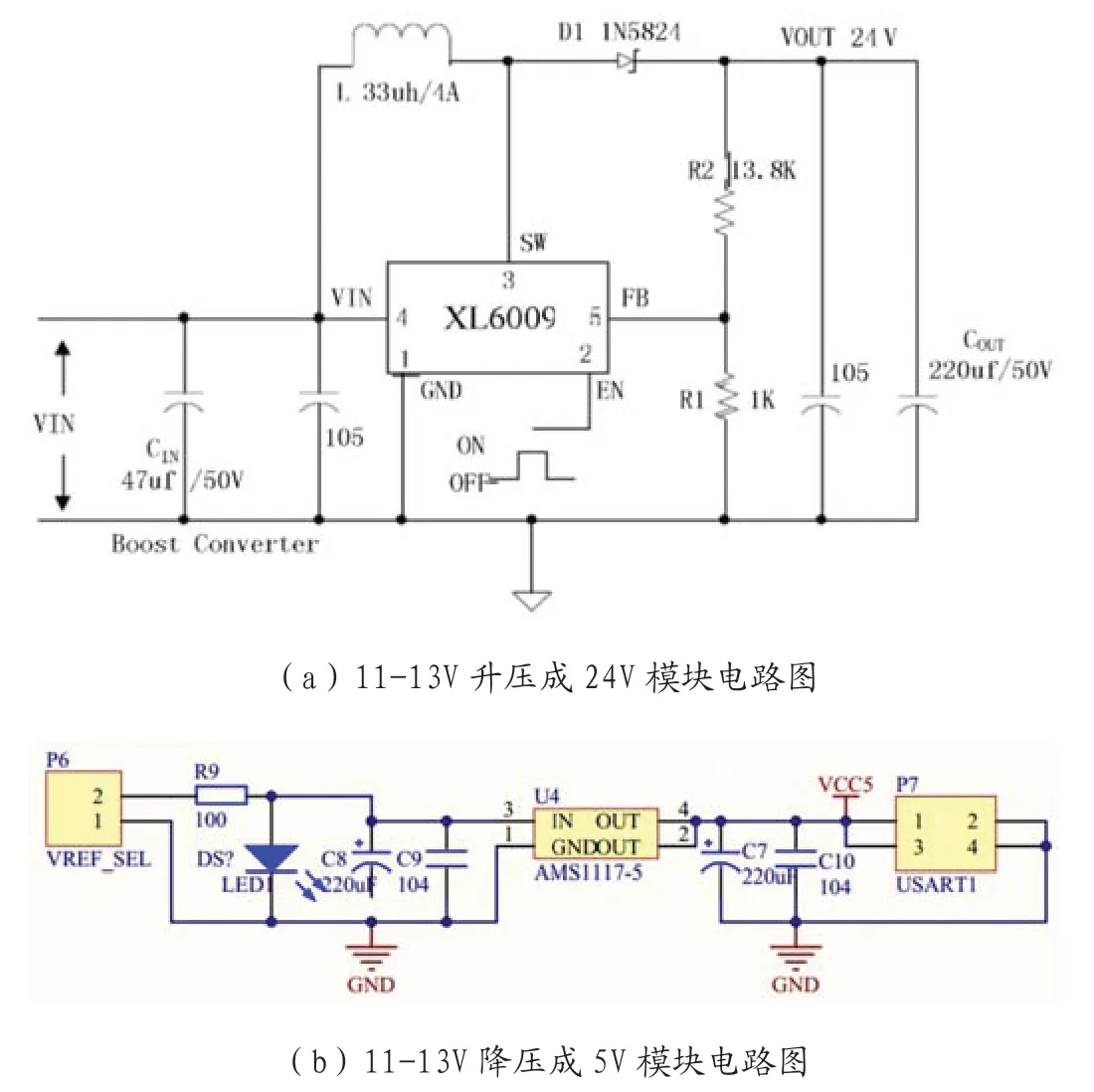
图7:电源模块电路图
(2)与传统只有四个固定档位的机械液压阀相比,本设计中的电流液压阀具有相当宽的多级调档范围,并且可以实现快速且准确的连续可调;
(3)本系统所示的叉车属具夹紧力控制系统系国内首创,填补了国内对这方面研究的空白,紧扣工业4.0时代的“智能工厂”和“智能生产”两大主题,紧跟“智能制造”时代潮流,具有相当大的市场价值。
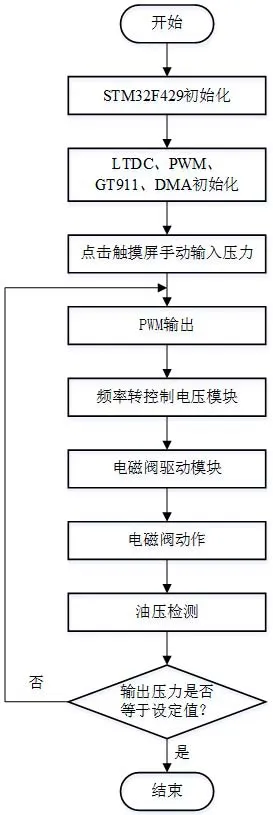
图8:主程序流程图
