一种新颖的头盔式微光夜视系统设计
2020-06-08朱标
朱标

摘要:提出了一种新颖的头盔式微光夜视系统架构形式,对其光学系统进行了研究。针对具体的头盔式微光夜视系统,运用CODEV光学设计仿真软件,设计了焦距为6.7mm,视场角为50°,相对孔径为1/1.25,光谱范围625nm-930nm的成像物镜;同时与之对应,设计了视场角为50°护目镜型头盔显示系统。结果是该成像物镜结构紧凑,镜筒长仅27.9mm,总长小于40mm,全视场畸变小于2%,在空间频率为501p/ram时,全视场调整传递函数(MTF)值大于0.2;护目镜型头盔显示系统全视场畸变小于10%,在空间频率为501p/mm时,MTF值接近0.2。不仅非常好地满足了头盔式微光夜视系统性能要求,而且极大地改善了传统头盔微光夜视仪的人机工效。
关键词:微光夜视;夜视系统;成像物镜;透视型;护目镜型头盔显示系统
中图分类号:TP919 文獻标识码:A
文章编号:1009-3044(2020)10-0281-02
1背景
头盔微光夜视仪是一种头戴式设备,该设备可以通过光增强技术,改善人们在夜晚或者低照明下的可视效果,相比较红外夜视仪,微光夜视仪具有不易暴露,更加隐蔽的特点,应用更加广泛,如军事应用,更加安全可靠。
目前市面上的微光夜视仪,采用的是像增强器技术,实现微光的增强,通过固定于头盔上支架吊装在佩戴者眼睛前方,造成头盔重心前移,使颈部除增加负重以外,还受到微光夜视仪附加的前倾力矩,容易疲劳,甚至在飞机大幅度机动时,容易引起其颈部受伤嘲。
本文所设计的微光夜视头盔系统主要由微光物镜、低照度摄像机芯和显示系统组成,实现了整个微光头盔夜视系统具有重量轻、结构简单以及视场、相对孔径、出瞳直径和出瞳距离大。像面照度均匀等特点。在传统的双高斯物镜基础上加入了非球面,解决了边缘视场照度下降非常快的问题。同时,本文为实现显示系统与头盔一体化,研究了用于机载头盔微光夜视系统的护目镜投射的显示系统。该系统结构紧凑、重量轻等优点,其各参量都到了世界先进水平。
2系统架构
因为微光夜视头盔使用时是佩戴在头部的,所以使用者的舒适性、安全性以及系统自身的实用性、可靠性是设计中必须要考虑的。
2.1光学耦合器
传统的微光夜视仪吊装于使用者眼前,只能看到微光物镜成像范围以内的信息。微光夜视头盔系统显示系统采用机载头盔护目镜作为光学耦合器,包括微型图像源、显控电路板和目视光学系统等单元,其中目视光学系统由中继透镜系统和光学耦合器组成,可提供微光物镜成像范围以外的信息;同时,具有最小化与佩戴人员的视觉矛盾,实现了最大化周围物景的视觉范围。
2.2内嵌式微光摄像机
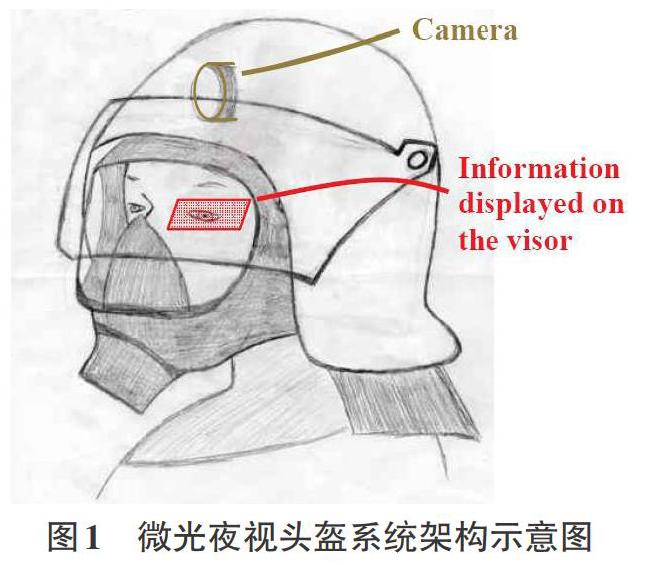
微光摄像机由微光物镜和低照度摄像机芯组成,采用内嵌头盔安装方式,这种结构不仅使微光夜视头盔系统结构紧凑,而且有利于减轻重量,同时避免了头盔表面出现明线,减少了头盔与其他设备碰撞和绷挂。
微光夜视头盔系统架构如图1所示:
3设计目标
参照国外,比如欧洲台风战斗机所配机载综合头盔系统设计指标,考虑国内低照度摄像机芯目前技术状态,确定本设计的目标参量为:
最大视场角:不小于40°×30°(中心轴上视场);
放大倍率:1倍;
角分辨力:不大于1.5 mrad(照度:0.011x,90%对比度靶板);
视频分辨率:不小于1280x1024(像素);
F/#数:不大于1.4f根据国内某款低照度摄像机芯F/#数为1.4时,能在照度0.0011x下,清晰连续成像);
对目标0.45m×0.45m进行观测,发现距离为300m,识别距离为100m。
4光学系统设计结果
4.1物镜技术参数
物镜的作用是把夜天光照射下的目标成像于低照度摄像机芯的感光面上。在微光夜视头盔系统中,成像的质量相当重要,其中微光物镜的设计尤为重要。综合微光夜视头盔的成像质量要求以及系统的监视距离要求,本设计针对微光物镜给出关于光学特性的三个性能参数指标。
4.1.1物镜焦距
本设计采用国产的最先进的低照度摄像机芯,主要特性参量为:
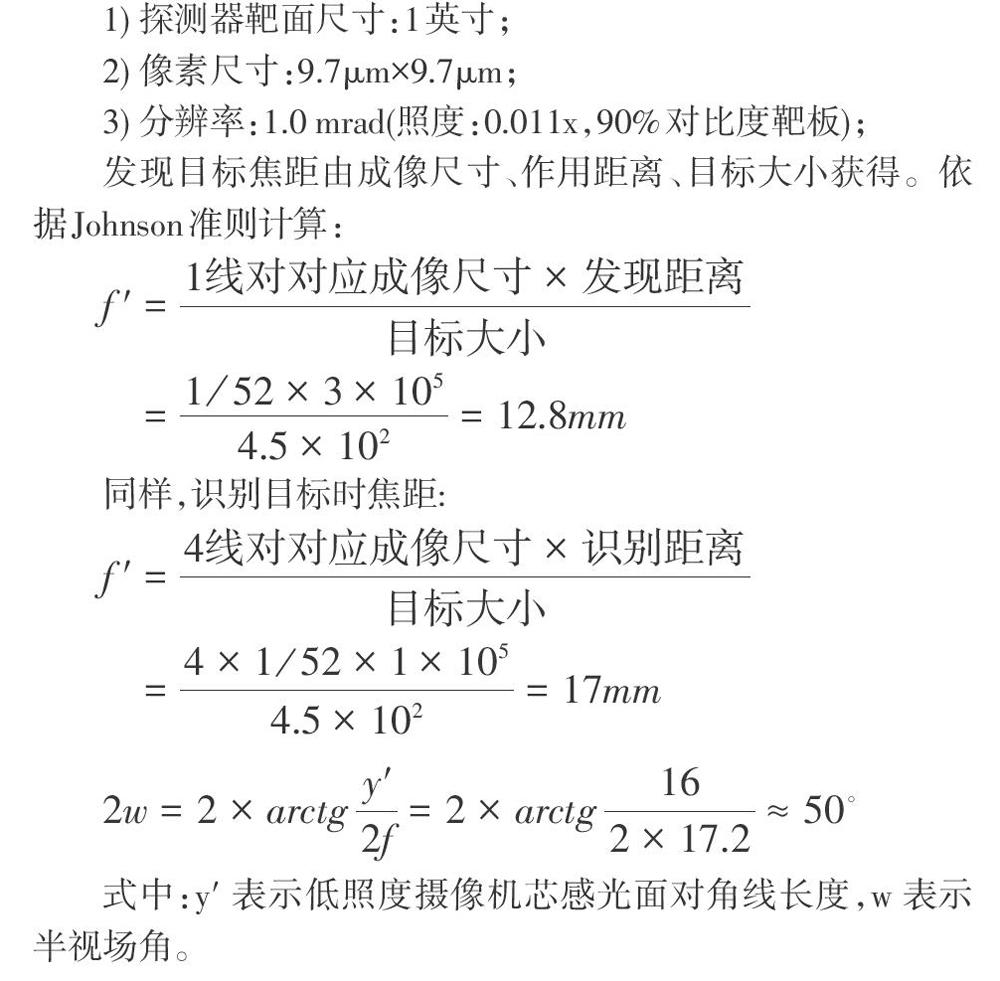
1)探测器靶面尺寸:1英寸;
2)像素尺寸:9.7um×9.7um;
3)分辨率:1.0mrad(照度:0.011x,90%对比度靶板);
发现目标焦距由成像尺寸、作用距离、目标大小获得。依据Johnson准则计算:
4.1.3物镜孔径光栏
相对口径不仅反映了镜头的分辨率,而且表明镜头接受目标光信号的最大值,选择时必须合理,因为如果过大,微光物镜的体积就会变大,重量变重,影响了佩戴效果,但是相对口径值又会受到透镜系统自身吸收问题以及大气透过率、摄像机芯在低照度下的感光能力等因素影响。所以,根据微光物镜的f/#不大于1.4,孔径光栏D最小为12mm。
4.2物镜设计结果分析及像质评价
4.2.1物镜光学系统特性
微光物镜工作在低照度环境下,通常,夜天辐射除可见光之外,还包含丰富的近红外辐射,同时考虑飞机座舱内夜视兼容要求,为此选择624nm、693 nm、762 nm、831 nm和900 nm为设计波长;此外,焦距f,为17.2mm,视场2w为50°,孔径光栏D为12mm,全视场畸变不大于5%;同时,空间频率为51.5 lp/mm时,传递函数(MTF)值:1)全视场不小于0.2;轴上视场不小于0.4。
4.2.2设计结果
以CODE v光学设计软件分析设计,设计结果为有7片透镜,其中第一片前表面为非球面,还有一个偶次非球面,根据微光物镜的调制传递函数曲线,在空间频率为50lp/mm时,全视场调制度大于0.2。轴上视场的调制度也接近0.4,满足低照度摄像机芯输入面分辨力51.51p/ram的要求。微光物镜的场曲小于0.05mm,可以忽略,最大畸变小于1.5%,用于夜间精确瞄准与测量。
4.3目视系统设计结果分析及像质评价
4.3.1目视光学系统特性
为了匹配人眼在微光或者夜视的情况下眼瞳变大到可达7ram左右,微光夜视系统的目镜系统需要大于7mm;同时保证光学耦合器与头盔护目镜无缝融合,根据实际头盔结构尺寸要求出瞳距离约55mm。目视系统的视场同其焦距及微型图像源有效显示面直径相关;同时受到微光夜视头盔系统放大倍率要求限制。所以,设计的出瞳直径15mm,视场为50°,出瞳距离50 mm,视放大倍率为1。
5结束语
基于微光夜视头盔系统对微光物镜及显示系统的典型要求,研究了基于低照度摄像机芯的光学成像系统,设计结果不仅实现了与头盔一体化结构,而且性能指标达到了或接近世界先进水平。以大相对孔径的双高斯物镜作为初始结构,设计了带有非球面的微光物镜,视场为50°,F/#数不大于1.4,焦距为17.2mm;在空间频率501p/mm时,全视场传函值不小于0.2;畸变小于1.5%;同时基于专利CN200910251432.9设计了匹配微光物镜的目视系统,出瞳直径15mm,出瞳距离50mm,光学耦合器与头盔护目镜完全融合,在空间频率351p/mm时,传函值大于0.2,虽然有最大为8%的梯形畸变,这可以通过电子预畸变予以校正。整个系统视放大率为1,结构紧凑,可以很好地用于机载微光夜视头盔系统。
