基于System Vue的爬壁机器人控制器研究
2020-06-06孟超,郭倩
孟 超,郭 倩
(1.西安工程大学 学报编辑部,西安 710048; 2.西安工程大学 电子信息学院,西安 710048)
0 引言
由于爬壁机器人[1]具有对墙面吸附能力强等特点,许多科研工作者对其进行了广泛的研究。文献[2] 提出了一种仿生爪刺式履带爬壁机器人,来提高爬壁机器人的粘附性能和脱附效率;文献[3]提出了一种基于振动吸力机构的壁虎式爬壁机器人,对机器人的爬坡能力进行了提高;文献[4]采用一种双环滑模控制算法,对爬壁机器人路径跟踪控制问题进行了验证,最终使整个控制过程的准确性得到了进一步提高。 但是爬壁机器人普遍存在结构较简单,灵活程度较低,智能性和掌控数据方面较差等问题,导致结构与尺寸的设计也不能较好地反映所处工作环境状态,无法对系统数据信息进行合理反映,而SystemVue能够充分解决攀爬机器人工作环境状态问题。
SystemVue是一款智能机器设计过程中所使用的模拟程序,能够使设计者在模拟环境中快速验证所设计的机器人性能。SystemVue拥有级频频射组件能够在时域、频域中同时模拟,具有较好的同步性,自身具备调制解调功能,滤波器抗干扰能力强,其多端接口可以使用多方数据库同时模拟,更能够识别C++、VHDL、mm-code等多种语言环境,是一款强大的模拟调试软件[5]。针对以上问题,文中基于System Vue进行了一种新式爬壁机器人控制器研究,对其进行系统分析。
文中通过对爬壁机器人进行控制器仿生分析,将机器人控制器内部系统进行理论性研究,在研究的基础上进行下一步的控制器系统动作追踪与处理,并进一步构造步态规划[6],将规划后的数据进行系统控制器控制,逐渐掌控控制器在理论分析过程中的全局数据,并由全局数据作为参数设置的基础,将参数构造到一定的高度,并进行参数信息的分析,获得符合工作环境的主导信息,以完成对爬壁机器人控制器自主控制算法的基础参数数据获取,并根据自主控制算法加强控制器系统操作,改进控制器硬件电路,最终实现对爬壁机器人控制器的研究。
该研究方法能够较好地完成控制器系统的控制工作,并在较大程度上减少了不必要的系统损耗,为理论性研究提供实验基础,并提升了控制器的性能,可更好地控制爬壁机器人路径。
1 仿生分析与步态规划
一般情况下,爬壁机器人的主体结构主要包括机器躯体、机器腿、机器脚掌3个方面,在机器脚掌部分多为仿生微纳米黏质材料,在一定程度上能够缓和机器人的自身重量,进而加强爬壁机器人的本体粘附能力[7]。
在机器人控制器仿生分析过程中,对爬壁机器人的腿部进行仿生关节的模拟性增加操作[8],并进一步提升关节的灵活性,促使关节在运行过程中能够自主完成对身体的前后控制以及倾斜处理,并增添其柔韧性能,利用伺服电机将脚掌部位的钢丝绳进行整体性拖拽,并进行系统驱动收线处理,在系统收线过程中完成对整体肢体操作的控制。并改变单向舵机的转动方向,提升其转动速度,增加脚掌部位与墙面之间的预压力,增大压力受力面积,降低对墙面的重力负担[9]。对脚掌进行柔性结构处理后的结构图如图1所示。
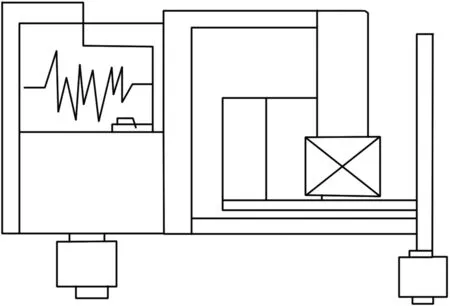
图1 结构图
在控制机构中主要包括系统传动结构与系统驱动结构,在系统传动的过程中,增强对钢丝绳以及部位前模块的驱动管理,在驱动系统中,提升整体驱动装置性能,并增添伺服电机以及收线装置,以进一步加强对驱动模块的集中式处理[10-11]。
首先将钢丝绳的首端与收线轮相结合,尾端与收线滑块相连,并将钢丝绳外套与聚四氟乙烯管的管体进行匹配操作,以适应管内滑动环境,进而减少操作的不必要损耗,将聚四氟乙烯管的一端与脚掌紧密相连,利用伺服电机的控制性能将收线轮带动,并实现钢丝绳的自主拉伸操作,在系统拉伸的过程中注重对系统的自我防护,减少拉伸摩擦,以保证控制器在运行过程中的运行路面平滑[12]。
在机器人的步态规划中要注重对伺服电机驱动的处理,加强电机的控制,并双向调节电机方向,同时对电机进行编号设置,设置实验电机为S、P、T,将电机S与传动机构中的脚掌部件相连。电机P与并联设施中的边轴进行连接,电机P与机器腿部进行连接,最终实现对腿部系统的摆动控制[13-14]。
由于爬壁机器人自身系统具有柔韧性,将伺服电机作为钢丝绳的拖动装置,同时规定收线轮的收线间距,其设置的公式如下:
(1)
式中,i为爬壁机器人的腿部系统摆动次数。通过式(1)查找制定规则,以此进行下一步骤的控制模型建立与参数设定。
2 控制模型建立与参数设置
根据仿生分析所获得的步态规划数据,对爬壁机器人控制器建立控制模型的和设置参数[15]。其控制器模型图如图2所示。
将爬壁机器人所具备的智能自主循迹经过系统模拟摄像进行图片收集处理,同时对处理后的引导性曲线进行系统分析与处理,并对图像灰度化与二值化信息加工,在获取的图像中标记一条较为清晰的追踪曲线,收集相关曲线信息,经过网络模块式加工,对图像进行分割,并对分割后的模块进行分类规划,获取规划后的整体图像,在网格图像中收集较窄的2条自主循迹引导曲线,并在2条曲线中选择合适的2个追踪节点F与H,将其所处位置用位置坐标进行标记,同时将2个点在中央图像中的位置分布进行吸收态的处理,如图3所示。
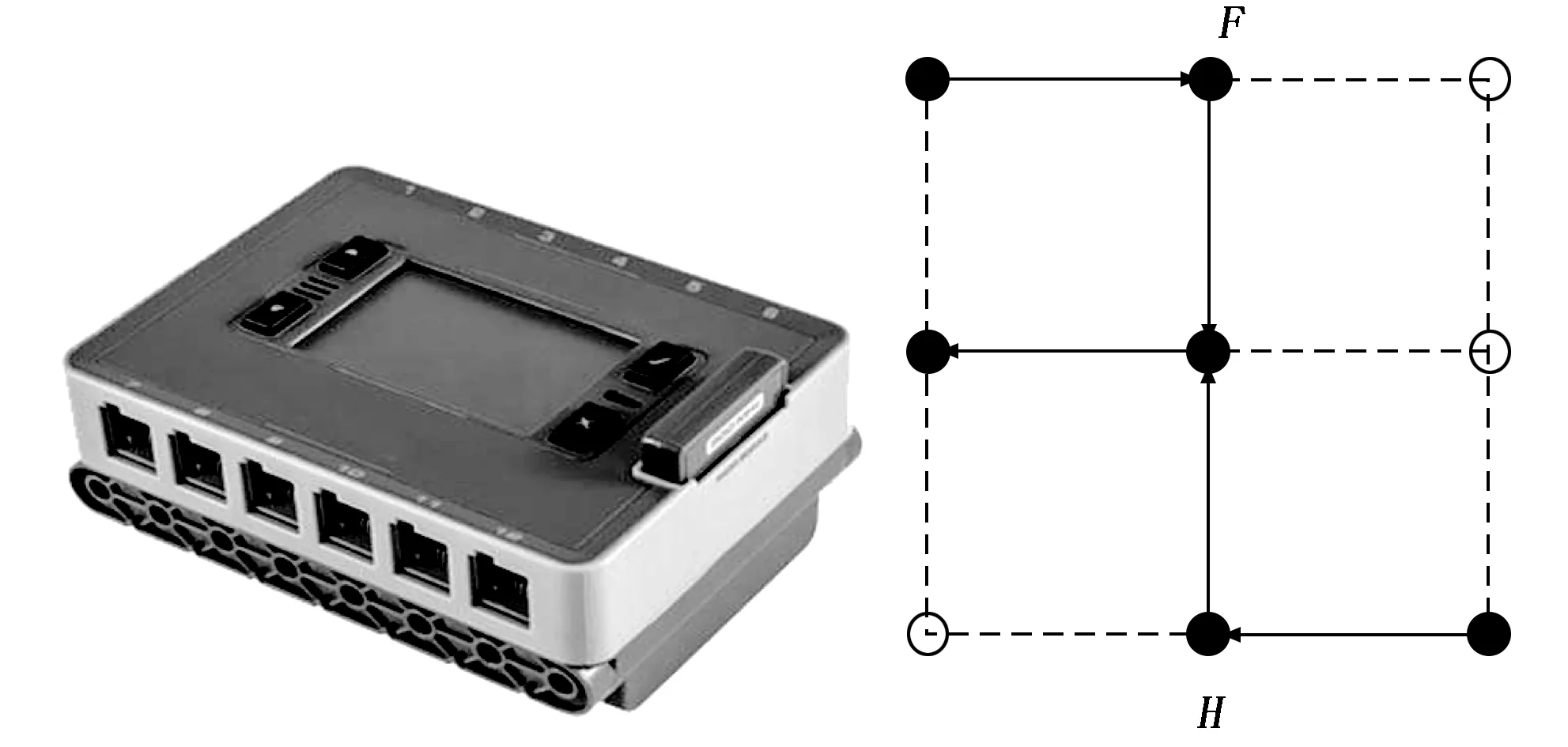
图2 控制器模型图 图3 节点分布图
爬壁机器人所构造的运作动态值应按照机器人在工作过程中产生的双门气阀开发差度值进行差值选取,并将获取的最终差值进行理论比较。其测量的差度值同时作为机器人动作标准性与准确性的具体参数,并利用参数得出的强化型信号将目标值进行分离操作,利用离散函数对奖励函数进行表示,同时将吸附状态时的奖励函数设定为:
(2)
式中,H表示爬壁机器人双门气阀开发差度值;K为其差度值的强化型信号;Q为爬壁机器人双门气阀开发差度的目标差值。
对剩余参数进行系统设置,其中折扣参数因子为Z,运行总距离为S,最终的探索次数最大值设置为T,探索次数的最小值为R,并保证系统在吸附状态下进行工作,选取下一步动作为备选动作进行系统处理,同时保证所获取的差度值为0,此时建立爬壁机器人控制器的控制模型为:
(3)
式中,pmax为伺服电机控制马达电力的最大值。将伺服电机的控制马达电力开至最大值,利用引导线对控制器进行稳定性处理,保证其在控制过程中不会产生位置偏移的状况,从而实现对爬壁机器人控制器的控制模型建立[16-17]。
3 吸附控制算法优化
在控制模型建立的基础上设计爬壁机器人控制器的自主控制算法,同时对控制算法进行系统加工。爬壁机器人的主要功能为吸附和移动,由于传统爬壁机器人控制器的控制仅对其移动方向进行简单控制,无法完成复杂的运行操作,为此,需进一步对控制器的吸附控制算法进行深入研究。爬壁机器人常见吸附方式包括负压吸附和永磁吸附,其中,负压吸附可以通过吸盘内产生负压而吸附于壁面上,不受壁面材料的限制,因此首先优化控制器的吸附控制算法。在吸附控制算法优化过程中要注重对于系统的自动化处理,并保持系统处于加强状态,在算法计算伊始,需对系统进行引导线的定额处理,将引导线作为处理的系统中心,同时利用引导路径加强系统自身防护,并对路径进行清理,在清理后进行吸附控制算法的优化。控制器系统引导线如图4所示。
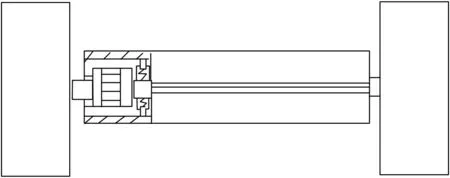
图4 控制器系统引导线图
为获取最佳算法策略,采用中心预测方法预估主动信息,更改吸附动作函数产生的运作值,使吸附函数数据保持更新状态,在策略更改的同时,将数据更新至与动作v无关的工作数值,同时更新控制器系统的吸附控制算法,公式如下:
(4)
式中,ak为负压吸附力更新值;ml为数据更新控制函数。根据式(4)加强对系统吸附功能的控制,同时计算出收敛函数的参照值,将参照值作为中心系统工作状态下必备的系统操作数值,并进一步对自主控制算法进行理论构建,同时连接引导线公式,将二者结合,并分离出不匹配数据,同时将数据进行录入处理,简化录入程序,在录入过程中加强对系统的掌控,保护系统在运作过程中不会产生毁坏问题,最后对其建立矩阵,加强Q矩阵设置,其矩阵如图5所示。
同时在初始状态引入Agent吸收态矩阵值,并为系统策略添加回报参数,以实现对自主控制算法的完善。
经过以上步骤对爬壁机器人控制器进行研究,不断加强控制器元件组合力度,最终实现系统理论性研究。
4 改进研究
爬壁机器人控制器吸附控制优化算法能够实现爬壁机器人吸附功能的优化。根据所设计的算法改进控制器硬件部分,其中控制器的核心硬件为遥感器,采用JH-D400X-R4型六向摇杆作为控制器的遥感器,其具有方向操纵灵活、速度误差小的优点,其内部示意图如图6所示。
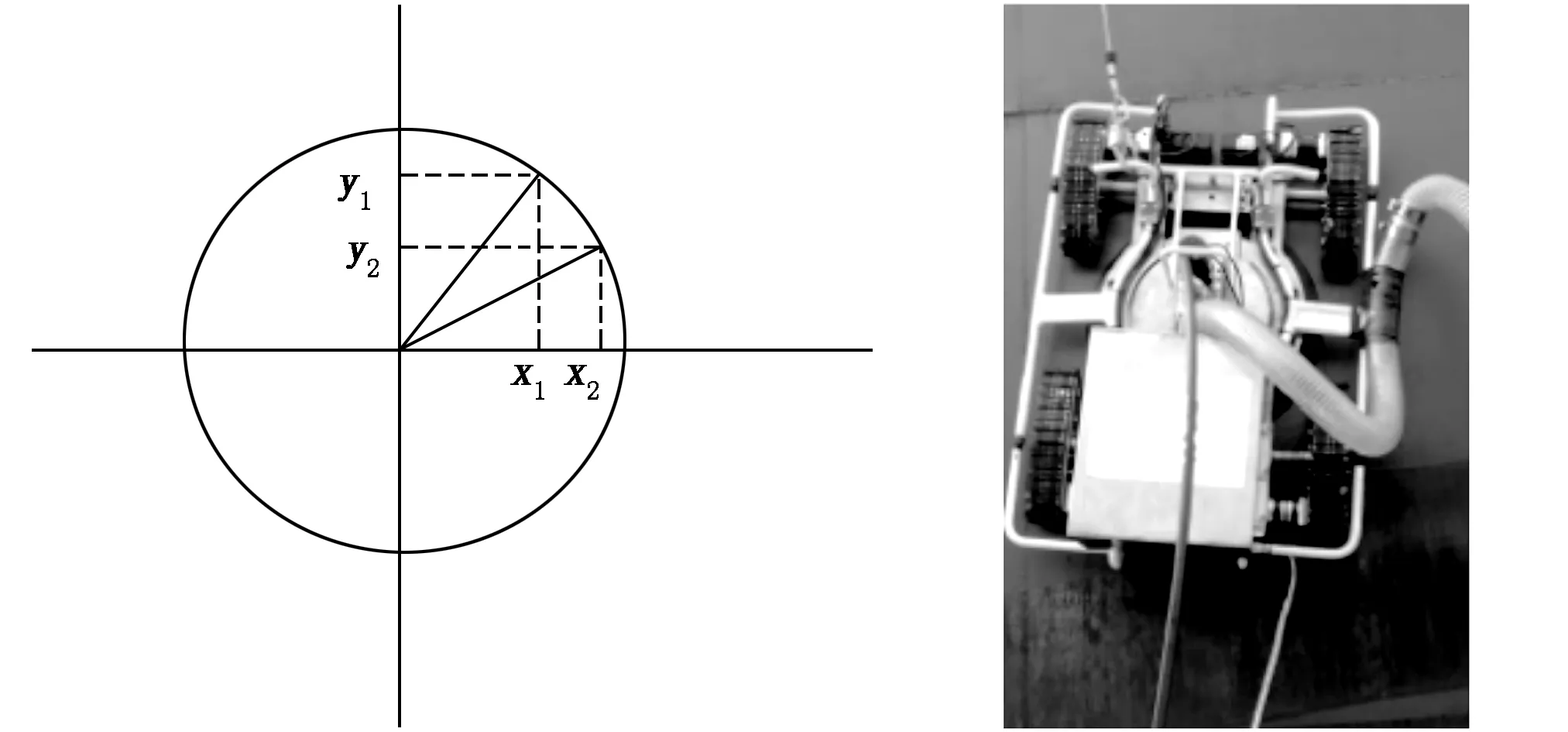
图5 Q矩阵图 图6 JH-D400X-R4型六向摇杆内部示意图
六向摇杆中包含3个10 kΩ滑动变阻器及1个按键,当电压外加至滑动变阻器时,变阻器电压会跟随摇杆的移动而变化,以此控制爬壁机器人的运行指令。由于摇杆只用于控制爬壁机器人的移动方向,不能控制爬壁机器人的吸附强度,对摇杆驱动电路进行改进。摇杆驱动电路改进示意图如图7所示。
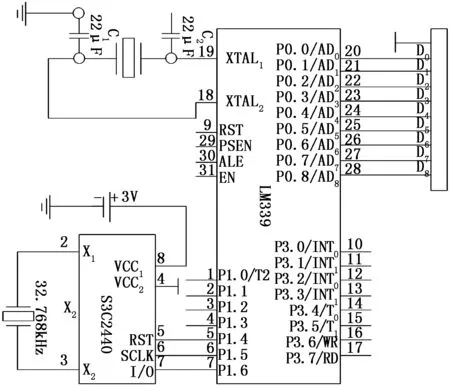
图7 摇杆驱动电路改进示意图
驱动电路中采用LM339芯片作为比较器,此芯片的输入阻抗较大,电平转换较快,能够满足对爬壁机器人的吸附控制。通过比较芯片转换遥感输出信号,并输出开关信号至S3C2440芯片的端口。端口负责采集摇杆状态变化信号,当摇杆发生变化时,S3C2440芯片端口利用ZigBee无线网络将指令信号传输给下位机控制系统,下位机根据指令做出相应动作,控制爬壁机器人的吸附和移动功能。
5 实验结果与分析
为了检测文中基于System Vue的爬壁机器人控制器研究的研究效果,与传统研究进行对比,并分析实验结果。
5.1 装置及参数
针对爬壁机器人机器转化的特殊性以及控制器系统的研究特性,在实验过程中应特别注意对其进行修护处理,并进行系统操作分析,为此,在System Vue中构建爬壁机器人控制器研究模型,对其进行理论性研究,如图8所示。

图8 控制器图
根据上述实验模型的建立,进行实验参数的设定,如表1所示。
5.2 结果与分析
根据图8构建的实验模型进行对比实验,将本文基于System Vue的爬壁机器人控制器研究的研究效果与传统爬壁机器人控制器研究的研究效果进行比较,得到的控制器控制性能对比图与控制时速对比图如图9和图10所示。
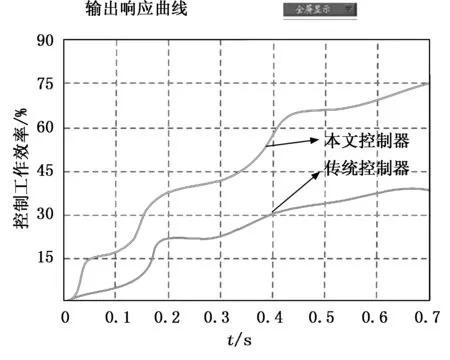
图9 控制器控制性能对比图
对比图9可知,文中采用自动控制算法,将爬壁机器人运行过程中所产生的动作值函数与状态值函数进行系统输入操作,在最终的系统运行过程中对运动状态进行策略性改正,并将控制器系统进行矫正性更改,同时将系统数据录入最终系统,保持数据保持持续更新状态,减少动作残余值的影响。并将函数最大化,在一定程度上保证了系统能够较为完整地体现控制系统的能动性,同时将控制信息快速收敛,获取最终准确系统信息。在获取信息的基础上进行实验,能够更好地提升控制器系统的控制性能,减少不必要的系统数据浪费以及系统装置损耗。而传统研究不仅具备此项算法处理步骤,对于系统控制器的处理较差,控制器的控制性能较差。
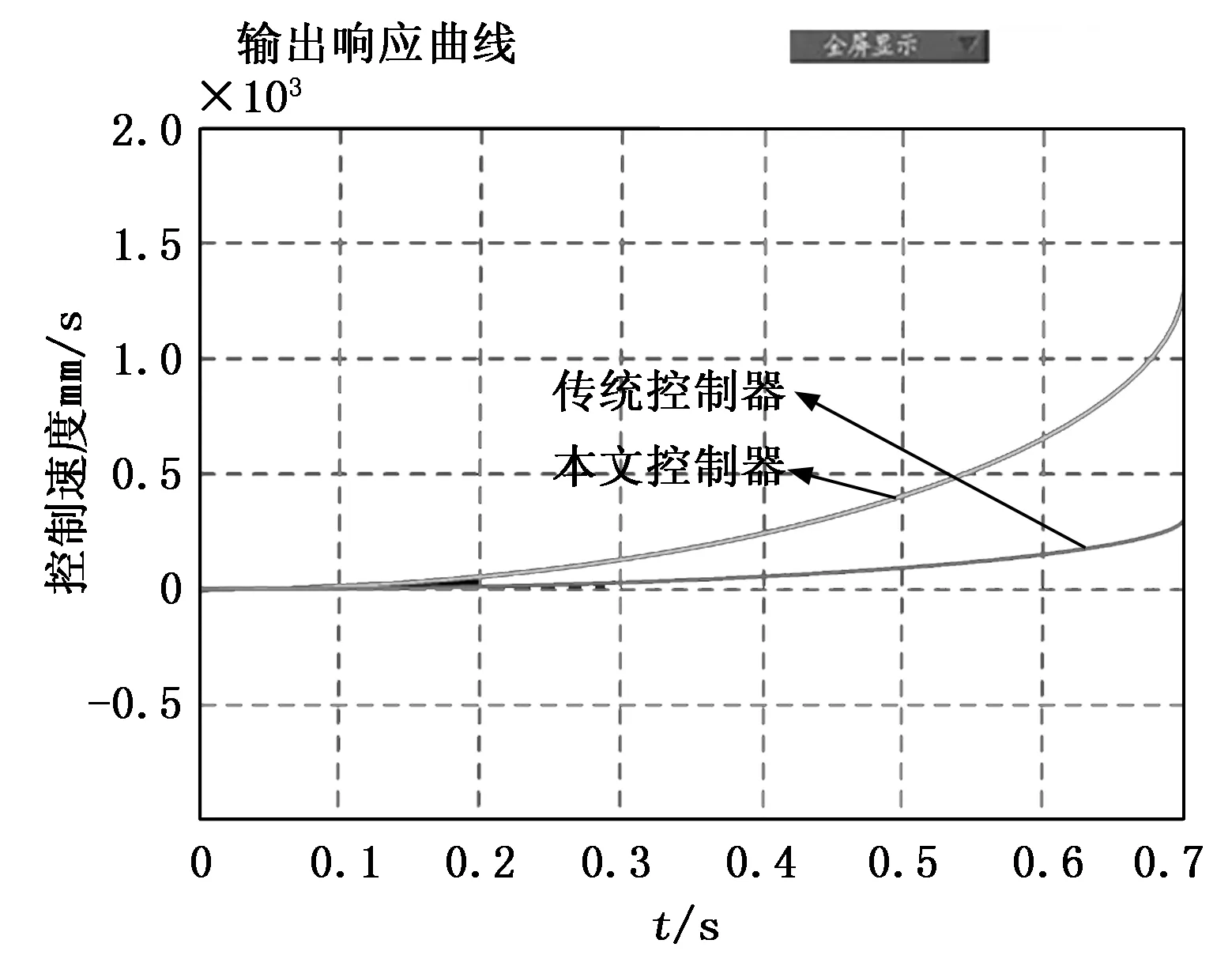
图10 控制时速对比图
对比图10可知,在同一时刻,本文研究方法比传统研究方法的控制时速明显提高。造成此种差异的主要原因在于本文对爬壁机器人控制器进行自动寻迹模型的构建,并设置合理参数,将引导线进行二值化处理,以寻求其最佳控制系统方案。同时利用网格对其控制行踪进行追踪,利用模拟摄影机器将控制所得的数据信息进行系统采集,并分类处理。对动作值进行实际测量,在最终获取的测量信息中对其进行系统比较,选取出较为集中的处理数据信息,进而提高控制器系统的准确性与高效性。在一定的时间处理下,本文研究对于控制器的综合管理功能较强,并能够在较快的速度内完成对控制器系统的管理,在此后的研究中,随着研究时间的增加,本文研究方法的控制时速不断提升,且一直位于传统研究方法之上。除以上原因外,本文采用整体运动规划的方法,对爬壁机器人控制器的运行轨迹进行系统性整合规划,并进行一步提升其系统自控力,并对其动作轨迹与操作行程进行简单追踪,同时在一定程度上保持了控制器系统的稳定性与爬壁机器人本身综合系统的敏捷度,将机身进行周期性转换处理,根据仿生机器人步态与其相应的对角线步态进行系统性比较,以此找出控制系统中存在的隐藏性故障。转变电机运动的时速,并增强时速运行系统,在高时速的状态下提升系统的工作质量。而传统研究方法对此的处理效果较差,在研究过程中忽略了对整体控制器系统工作的时效性处理,对于控制器时效性方面的研究较浅显,最终研究的研究效果较差。
经过以上对比分析可知,本文研究方法的控制器控制性能与控制时速均位于传统研究方法之上,能够在较高的程度上增强控制器系统的整体工作性能,并对缺点因素进行较好的系统方法式处理,在理论研究的基础山同时提升系统的工作时速,并进一步增强主动控制系统的能动性,促使系统能够进行自我处理与保护,具备更加广阔的使用市场以及较好的发展前景。
6 结束语
文中在传统研究方法的基础上进行了一种新式基于System Vue的爬壁机器人控制器研究,该研究方法的研究效果优于传统研究方法。
首先对爬壁机器人进行控制器仿生模拟分析,对其控制器组成结构以及整体机体状态进行系统分析,在结构构造仿生的过程中,正确处理步态规划问题,并将二者结合,进而创建控制模型,并由此获取所需参数,并对参数进行系统录入处理,选择合适的录入数据放置到主控制中心系统中等待系统验收,并获取最终的正确参数。在参数获取后,优化吸附控制算法,对其所进行的动作函数进行系统分析,以保证控制器系统能够较好地完成系统所需任务,据此改进控制器硬件电路,最终达到对爬壁机器人控制器研究的目的。
相较于传统研究方法,该研究方法能够在较短时间内提升爬壁机器人控制器系统的系统性能,并进一步提升其控制的效能,在系统工作过程中加大对系统的自主保护,以提升整体控制器的工作效率,为今后的研究提供系统支撑,以期具备更佳的研究效果。
