基于贝加莱PCC 的调速器频率信号处理研究
2020-06-05李高朋喻小琴
李高朋,郭 琛,喻小琴,董 刚
(中国长江电力股份有限公司白鹤滩电厂筹建处,四川 凉山615400)
1 引言
机组频率信号通过测速装置送至调速器,调速器调节导叶开度对机组转速进行调节,同时机组转速通过转速装置送至励磁系统、机组同期并网装置、高压油系统、机组制动系统、机组过速保护装置等,因此发电机组对频率信号的准确性、稳定性和实时性要求较高[1]。然而,工业环境的复杂性使得部分信号存在一定的干扰,更可能出现信号突然中断等情况,为保证机组采用的信号更加接近真实值,使得设备更加安全稳定地运行,就必须对这些信号进行处理,及时判断信号故障,并作出合理的应急处理。
针对某巨型水电站调速器运行环境的特点,除硬件滤波整形外,还通过贝加莱PCC 处理器对频率信号进行了软件滤波处理,即不断地检测本周期采样与上周期采样的差值是否越过设置的容忍范围,同时也会对频率采样进行故障判断。本文即通过分析贝加莱PCC 频率测量和选择等程序,并结合调速器实际测频方法,对频率信号的处理方式进行了研究。
2 机组频率测量方式
处理机组频率信号,首先需对机组频率信号进行测量。测量频率一般采用测量周期法(测周法)或测量频率法(测频法),对于额定频率为50 Hz 的水轮发电机来说,应当选择测周法[2,3]。按频率信号的采集方式,转速测量方法分为直接测量和间接测量。直接测量一般有离心式、测速发电机式、齿盘式等,间接测量主要应用PT 残压测频法。
该巨型电站调速器同时采用了齿盘信号和PT残压信号两种测频方式对机组的频率进行测量,两者冗余输入,保证了机组频率的真实性和可靠性。
2.1 PT 残压测频
机组残压信号取自发电机机端电压互感器PT,信号幅值一般需超过0.2 V,它是目前普遍采用的方法,具有低成本和高精度的优点,但是残压测频是一种机组频率的间接测量方式,且易受到高次谐波的干扰,故其可靠性不高[4]。
PT 残压测频实现步骤为:输入的PT 残压信号(正弦波),经过小型隔离变压器进行隔离和滤波处理,去掉低频干扰信号,然后将处理后的正弦波信号通过整形电路,整形为数字电路可以识别的方波信号,再取方波信号的上升沿或者下降沿作为边界,构成测频计数的窗口。通过选用控制器内部内置的与硬时钟相关联的计数频率作为测量基准频率,然后用测量基准频率对测频计数窗口进行计数。最后将窗口计数值换算成目标方波的周期,再将周期换算成目标方波的频率。
2.2 齿盘测频
齿盘测频由安装在大轴上的齿盘与电磁式接近开关组成,它是一种直接测量机组转速的方式,其可靠性和可信度明显优于残压测频,然而其测量精度受齿盘的加工精度、机组摆动和齿距的不均匀性等机械因素的影响较大,难以达到调速器对频率测量的精度要求[5]。齿盘测频可分为单探头和双探头,目前该巨型电站调速器均采用单探头测频,机组磁极对数都是40,齿盘齿数均为80,齿数选择是发电机磁极对数的两倍,既能保证安装精度的控制,又能方便测量信号的处理(只需对测量频率做一个倍频的处理即可),可靠且易实现
当机组大轴转动时带动齿盘同轴旋转,固定在支架上的测速探头就产生一个个阶跃信号,该信号的幅值与机组的转速无关,频率与机组转速成正比。若测量频率为f1,齿盘齿数为n,发电机磁极对数p,则机组转速r和机组频率为f可由下列计算式得到:

从测频响应的角度来看,齿盘齿数越多,测频响应越快;从测频精度来看,齿盘齿数越少,加工误差越容易控制,且能减小大轴摆动等因素对测量的干扰,测频精度会越高。
3 贝加莱PCC 频率处理
3.1 测频原理
该巨型电站调速系统通过使用贝加莱PCC 中的X20DS1319 高速计数模块对不同频率信号进行了计算测量、滤波处理和优先级选择等。B&R X20DS1319 利用边缘检测(Edge detection)功能及上升沿或下降沿的检测功能可以检测输入信号的上升沿或者下降沿出现时的时标(时间计数值)以及边缘信号之间的时间差,从而进行频率测量和相位差测量。
X20DS1319 模块能够将时间轴切割为均匀的时间片段,然后去计算时间轴上两个时间点之间这些均匀的时间片段的个数,实现计时功能从而实现测量信号周期和频率。其中一个均匀的时间片段叫一个Tick,X20DS1319 的一个Tick 可以设置为1 μs 或者1/8 μs(程序中残压频率和电网频率程序设置Tick 时间为1/8 μs,2 个齿盘测频设置Tick 时间为1 μs。)。在时间轴上,记录master time 与slave time 2 个时间点的Tick 数量,取2 个时间点的差值Difference,即在2 个上升沿之间的Tick 的个数。
待测波形的周期T=Difference×Tick。
待测波形频率F=1/T=1/(difference×Tick)。
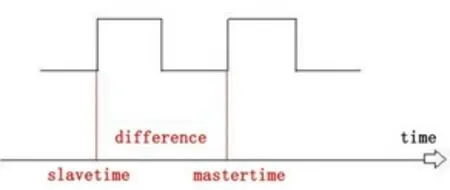
图1 X20DS1319 测频原理图
3.2 频率测量
贝加莱AB 套调速器均有2 个X20DS1319 模块,第一个DS 模块输入残压频率和电网频率的上升沿和Difference 数值,另一个DS 模块输入2 个齿盘测频的上升沿和Difference 数值。freqcency 程序由4个功能块组成,2 个功能块一组分别对应2 个X20 DS1319 模块,图2 所示为齿盘测频1 功能块。

图2 齿盘测频1 功能块
功能块通过程序计算将输入的齿盘上升沿和检测次数即Difference 数值输出为sensor_gear_one 的结构体变量:b_validity(是否有效)、b_alarm(是否故障)、di_value(频率值)、b_line_break(频率波形是否连续不间断)、b_hop_hop(频率值是否跳变)。通过分析测频程序知其具体步骤为:通过2 个上升沿之间EdgeDelect_Time 即Tick 个数和设置的Tick 时长从而计算出频率值;然后依据freq_DI 上升沿计数确认频率是否连续;接着在连续不间断的基础上再通过2 次频率值之差值大小确认是否有跳变;最终依据是否连续及是否有跳变进行故障判断。
3.3 频率选择
3.3.1 滤波处理
频率选择之前对4 种freqcency 程序的输出频率值di_value 再次进行了滤波处理,使其更加准确稳定,功能块中表决数均输入为n=10。过程为将最近10 次的freqcency 程序输出频率值di_value 形成堆栈,最终前9 次频率值与最新输出频率值重新组成a[1..40]的数组,然后去除数组前10 个元素中最大与最小的频率值,再求取剩余8 个频率值的平均值,从而达到滤波的作用。
3.3.2 频率选择
频率选择首先是对齿盘频率的齿盘1 和齿盘2进行优先级选择,然后通过判断机组运行状态对残压频率和齿盘频率进行优先级选择。
齿盘1 频率和齿盘2 频率选择流程图如图3。
由图3 可知齿盘1 和齿盘优先级顺序为:当齿盘1 配置正常且齿盘1 输出无故障时,齿盘频率优先选择齿盘1 频率且齿盘频率可用;当齿盘2 配置正常且齿盘2 输出无故障时,齿盘频率备用选择齿盘2 频率且齿盘频率可用;当两者都不可用时,齿盘频率输出0。
残压频率与齿盘频率选择流程图如图4。
由图4 可知,机组在空载或负载态时,优先选择残压频率输出,齿盘频率备用,均不可用输出为50 Hz 并报频率故障;机组在开机过程或停机过程时则相反,优先选择齿盘频率输出,残压频率备用,均不可用输出为0 并报频率故障;机组停机备用态则所有状态复位,即所有频率输出均为0,所有频率输出均无故障。
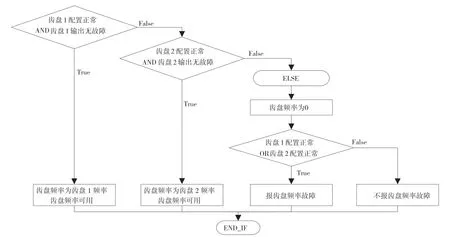
图3 齿盘1 频率和齿盘2 频率选择
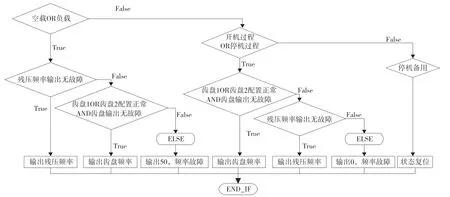
图4 残压频率与齿盘频率选择
4 结论
依据机组实际运行情况与贝加莱频率测量方式可归纳残压频率与齿盘频率的优缺点及选择优先级如表1。

表1 残压频率与齿盘频率对比
当机组处于开机过程的开始阶段时,残压测频的信号幅值较低,不能满足测频的需要,因此采用齿盘频率作为机组频率,当调速器转入空载之后,残压测频的信号幅值已经大于200 mV,采用残压频率作为机组频率;机组空载或者负载运行的过程中,发生残压机频故障时,取齿盘频率作为机组频率,如主用机残压机频故障和齿盘测频故障同时发生,则判为调速器频率大故障且机组频率强制输出50 Hz。