汽车无线防盗防撞报警器的设计
2020-06-04孙景伟丁学用
孙景伟 丁学用
摘 要:文章针对车辆正常运行和车辆防盗问题,提出了汽车无线防盗防撞报警器的设计方案。该系统主要对车辆行驶(包含前进、倒车、转弯)的环境进行判别,用两车之间的间隔或者车与障碍物的距离作为判断依据,一旦达到危险极限阀值,系统会发出危险警报提醒,大幅度减少交通事故的发生。此报警器以单片机为主体结构,包含了4个不同的模块:数据显示、距离测量、无线发射和无线接收。采用单片机(STC89C51)为主控器,用超声波进行测距,震动检测模块检测震动,并使用发光二极管进行数据的显示。此系统具备显示效果直观、电路简单易懂、切换简单方便、成本低廉等优点,市场前景非常广阔。
关键词:超声波测距;无线发射;无线接收;无线防盗防撞
目前,汽车防盗器的性能已经达到较高水平,开始综合应用电子传感器进行智能警报,有的还应用了生物防盗电子控器电路或机械结构,报警器和驱动器组成了电子防盗系统,可更好地满足智能控制的相关要求,并向着智能化和自动化靠拢[1]。
该系统在运行过程中通过改变传感器测量距离,及时把车与危险物体的极限距离显示出来[2]在防盗开关闭合时开始进行防盗,在其他人员接近且在车内产生振动情况下,系统就会自动进行报警且发出相关的声光信号。
在系统运行过程中,车辆处于倒车模式时测量出车后方和障碍的间距,当距离低于设定值时,报警系统就会发出警报,让驾驶员保持警惕。在报警系统正常运行的情况下,震动检测模块会检测车辆上是否有人盗窃。
1 基本原理
1.1 系统整体框架结构
此系统的核心为STC89C51单片机,此外还包括测距电路、按键电路、无线电路这几个模块,综合实现相关的功能[3]。各个电路一一对应和单片机进行连接,以单片机作为大脑,在单片机的操控下实现各个模块的功能[4]。本设计的主程序主要进行超声测距且将结果显示到数码管上。首先,将声波以40 kHz频率发送出去,同时,计时器开始计时,等到信号返回时,结束计数且进行计时,确定障碍物到汽车的距离,然后在数码管(发光二极管)上显示数据。
1.2 方案比较
1.2.1 测距模块设计与论证
方案一:雷达测距。发射电磁波,遇到物体(或者前方车辆)后自动反射回来,计算其距离。特征表现为探测稳定、可有效抵抗干扰,但控制成本高。
方案二:在一般情况下,超声波测距采用频率高于20 MHz的机械波,渗透性强、褪色少、反射强。在运行过程中接收到反射信号后,发射器会发射一定长度的连续脉冲,通过计算时间差得出距离。
本设计使用方案二,原因是超声波不但原理简单、制作方法简单,而且成本较低。
1.2.2 按键模块设计与论证
方案一:使用普通点动按键进行控制。
方案二:通过自锁开关按键进行控制,在运行过程中按下此按键后,相应的测距模块电源被接通,按键松开时,对应的震动检测模块开始处于工作状态,进行防盗检测。
此模式下需要不断进行撞和防盗切换,控制简单,可不必单独设置。在方案一中,每个按键对应各子程序,更为方便,因此,本设计选择了方案一的点动按键。
1.2.3 防盗模块设计与论证
方案一:选择了热释电红外传感器,也就是基于红外探测的原理进行报警,在运行过程中可检测到人体发射的红外线辐射而进行报警,这种传感器只能在室内进行工作,容易受外界干扰。
方案二:采用震动检测器。在运行过程中,如果车辆出现了明显的振动,则可进行报警提示。在出现报警信号的情况下,可将其通过无线模式传给接收端,对车主进行提示。本设计采用震动检测,因为温度会影响红外传感的精度,从而导致结果不准确。
2 主程序设计
接通电源后,系统的默认工作模式为防撞模式,LED数码管显示与障碍物的间距。在运行过程中,系统可发射出一定的超声波脉冲,然后对车辆和障碍物的间距进行判断,且和设定的阈值进行对比,并通过LED数码管显示出两者之间的距离[5]。转换开关(自锁开关),控制两种模式的切换,当按下转换开关时,系统将进入防盗模式的初始化,LED数码管显示“000”,当系统初始化完毕时,开始检测是否有震动。一旦达到危险距离或者出现震荡,系统会开始声光警报。
3 硬件調试
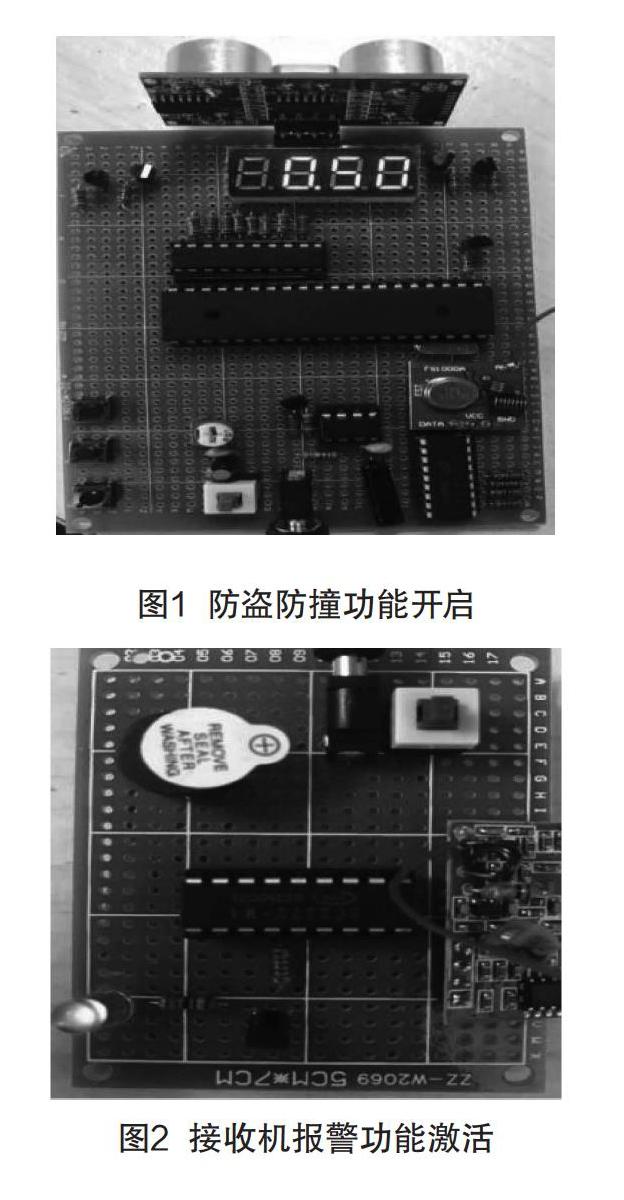
防盗防撞功能开启时,承担了探测距离和震动检测的功能,如图1所示,3个点动按键从上到下分别为距离“+”键、距离“-”键、设置距离键。自锁开关用于两种模式的切换。当防撞功能开启时,LED发光二极管显示探测的距离(默认为50 cm)。当防盗功能开启时,检测到振动时,发光二极管会闪烁。
图1 防盗防撞功能开启
图2 接收机报警功能激活
接收机报警功能激活时,承担了接收信号和发出警报的功能,如图2所示。当接收机接收到发送机的无线信号时,即开始进行防撞功能时,检测的距离到达阀值,接收机的声光警报就会被激活。
在调试过程中,需要用到主控模块,根据调试结果,在出现以下方面的问题时,需要进行适当的处理。
3.1 接上VCC时,发光二极管没有变亮,无法显示信息
(1)在VCC未连接的情况下,测试结果发现单片机加载了5 V电压。
(2)P1为低电平情况下,分析其输出为低。
(3)检查P0口,结果发现上拉电阻没有连接上,将其接入之后正常显示。
3.2 不能正常显示数据
(1)检查单片机引脚和数码管连接是否正确,经过检查发现数码管的连接方面是正确的。
(2)查看超聲波模块连接方式的是否正确,检测出发射模块和接收模块是否接反。然后对其进行调整处理,就可满足显示相关的要求。
4 结语
该系统的主要组成单元包括超声波传感器、单片机、收发电路等。在运行过程中,超声波传感器发送和接收超声波,然后测出距离,并且在显示器上显示所测量的距离。利用振动检测器检查是否存在震动,当存在震动时,发送无线信号并发出警报。焊接的工艺和元器件的质量会导致测量的极限距离有时不完全满足设计的要求,但是误差不大,影响很小,可以满足日常的测量要求,具有较高的应用价值。
[参考文献]
[1]贾宗璞,许合利.C语言程序设计[M].徐州:中国矿业大学出版社,2007.
[2]何希才.传感器及其应用电路[M].北京:电子工业出版社,2001.
[3]李朝青.单片机原理及接口技术[M].北京:北京航空航天大学出版社,2011.
[4]李泉溪.单片机原理与应用实例仿真[M].北京:北京航空航天大学出版社,2009.
[5]华成英,童诗白.模拟电子技术基础[M].4版.北京:高等教育出版社,2006.
Abstract:Aiming at the problems of vehicle normal operation and vehicle anti-theft, this paper puts forward the design scheme of wireless anti-theft and anti-collision alarm for automobile. The system mainly discriminates the environment of the vehicle driving including forward, reverse, turn, using the interval between the two vehicles or the distance between the vehicle and the obstacle as the basis for judgment. Once the danger limit threshold is reached, the system will issue a danger alarm warning and greatly reduce the occurrence of traffic accidents. This alarm takes the single chip microcomputer as the main structure and contains 4 different modules: data display, distance measurement, wireless transmission and wireless reception. Single chip microcomputer(STC89C51)is used as the main controller, ultrasonic is used for ranging, vibration detection module is used to detect vibration, and LED is used for data display. This system has the advantages of visual display effect, simple and easy to understand circuit, simple and convenient switching, low cost and so on.
Key words:ultrasonic ranging; wireless transmitting; wireless receiving; wireless anti-theft and anti-collision
