试析大型无人机电力巡检LiDAR点云安全距离诊断方法
2020-06-03熊勇良罗志勇罗泽雄
熊勇良 罗志勇 罗泽雄

摘 要将大型无人机当成是激光雷达的承载平台,能够加强线路LiDAR点云数据提取分析,为线路安全检测提供依据。基于此,本文结合电力巡检LiDAR点云安全距离诊断内容,对基于大型无人机的线路LiDAR点云数据采集和分类提取问题进行了探讨,提出了相应的安全距离诊断方法,为关注这一话题的人们提供参考。
关键词大型无人机;电力巡检;LiDAR点云;安全距离诊断
0 引言
伴随着电力事业的快速发展,采用人工巡检方式已经无法满足电力工作的高效开展需求。而大型无人机可以用于搭载激光雷达测量设备,高效完成线路点云数据采集。用于对线路安全距离开展诊断,能够及时完成安全隐患排查,在节约人力、物力和时间成本的同时,满足线路安全管理要求。因此还应加强大型无人机电力巡检LiDAR点云安全距离诊断方法研究,以便为巡检工作的高效开展提供支撑。
1 电力巡检LiDAR点云安全距离诊断
在电力巡检中,需要完成线路安全距离诊断。具体来讲,就是对电力线与周围构筑物、植被、河流等其他走廊地物间距进行计算,确定是否有地物处于危险范围。针对判定的危险隐患,需要结合相关数据提交危险点报告,确保巡检人员能够及时完成地物清理,保证线路运行安全。现阶段,在电力巡检中将采用激光雷达系统获得电力线的LiDAR点云数据,通过数据处理完成电力线建模,用于区分电力线类别。在空间中,电力线属于离散点,需要将点云生成矢量电力线,保存在矢量图层中。电力线的安全距离与线路电压等级和地物类型有关,如在220kV输电线路安全规范中,与树木应保持4.5m垂直距离,与建筑物则要保持6m垂直距离,与公路需要保持8m垂直距离。根据电力线走廊中导线与地物的安全距离标准,能够通过分析矢量图层完成危险距离诊断。
2 大型无人机电力巡检LiDAR点云安全距离诊断方法
2.1 线路数据获取
采用大型无人机进行电力巡检,按照架空输电线路运行规程管理要求,导线边线向外侧水平延伸的一定范围与地面垂直形成的两平行面内都属于保护区。结合线路电压等级,可以确定保护区范围,然后两侧各加50-100m宽作为巡检范围。66-110kV外边线距为10m,电压等级越高线距越大,750kV线路外边线距为25m,所以无人机巡检宽度在100-200m范围内[1]。无人机扫描带宽与飞行高通常为0.8:1,在飞行高度达到100m的情况下,可以对80m宽范围进行覆盖。结合地形高度和激光点云密度,能够对无人机飞行速度、高度等进行确认。结合影像拍摄的重叠度要求,可以提前完成拍摄时间间隔设定。
实际在对电力线路进行扫描检测时,如果采用常规方式仅能获取杆塔信息。为获得地物和杆塔导线空间信息,需要采用椭圆扫描方式,对侧面轮廓与信息进行采集,为后续矢量模型建立提供数据支撑。实际在外业数据采集期间,为满足电力巡检的高精度数据采集需求,需要在大型无人机底部完成激光雷达系统安装,促使其以10~15m/s相对飞行高度飞行,通过自动化巡检完成线路通道数据采集。系统利用GPS对信号发射参考点的空间位置进行确认,利用INS完成姿态参数测定,利用激光测距确定参考点到激光脚点的距离。
2.2 点云数据分类
在LiDAR点云数据提取方面,还要对采集到的数据进行预处理,得到LAS文件,然后利用TerraScan软件完成三维点云数据分析,实现植被、杆塔等不同地物数据的分类提取,用于建立矢量模型和完成线路安全距离诊断。在实际操作中,需要将采集到的数据导入到Waypoint Inertial Explorer软件中,通过处理惯性测量元件数据和GPS数据得到OUT格式的航迹文件。与RXP格式激光测距文件结合,能够生成LAS格式激光点云文件。
文件中包含杆塔、植被等各种地物数据,同时也包含灰尘、水汽等外界因素带来的噪点,还要通过去噪处理得到准确数据参数。由于噪点属于孤立点,相较于周围点存在高程突变。在对噪点进行滤除时,需要选择点云数据中高程最低的点作为低点,考虑到这些点容易出现错误,还要作为初始计算点完成不规则三角网模型建立。采用迭代方法在模型中完成新点添加,能够完成新模型构建。多次迭代后,得到的模型将会接近地面真实地物分布情况。如在构筑物尺寸为60m的情况下,可以认为60×60m范围内存在落在地面的最低点。在三角面上,存在目标点的投影点,与最接近目标点的三角面顶点连线构成的角度最大。将三角形较大时迭代不发生大幅度跳跃当成是条件,可以完成迭代距离的设置。将地面模型当成是基础,能够完成地物点云数据分类。
2.3 矢量模型分析
完成点云数据分类后,需要对各种走廊地物到导线距离进行量测,为安全距离诊断提供数据支撑。结合这一目标,需要对导线垂弧坐标进行准确提取,完成矢量拟合,为导线到地物的距离分析提供便利。在三维空间中,位于杆塔之间的导线属于曲线,拥有曲率,不能单纯根据杆塔间距确认。在线路分布不均的情况下,采用分段质心拟合方法能够轻松完成点云矢量拟合,但存在段间不平滑问题,容易造成激光点云数据的直线部分缺失[2]。针对这一问题,还要采用连续光滑的悬链线完成导线拟合,精确反映导线弧垂,避免点云数据缺失。采用悬链线模型,需要利用模型定义方程对模型参数进行求解,如式(1),用于实现曲线矢量重建。
采用上述方法,需要利用区域生长法对电力线路点进行分隔,然后利用Levenberg-Marquardt实现模型计算和拟合,经过2-3次循环迭代分析能够使算法得到收敛。
2.4 安全距离诊断
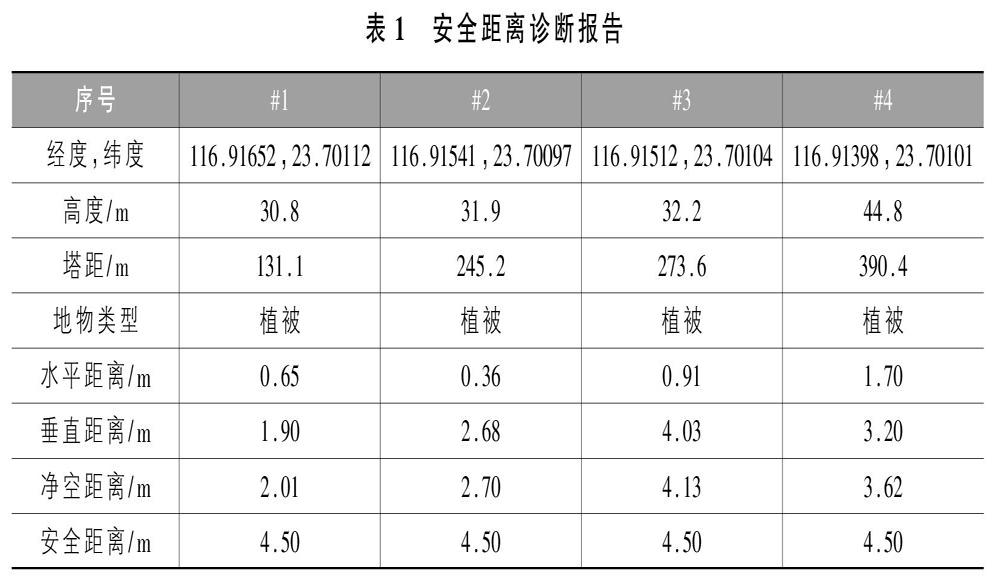
根据得到的拟合曲线,可以完成导线与地物距离测算。具体来讲,就是通过分段剖面运算对曲线矢量数据和地物点云数据进行处理,将计算得到的距离与标准安全距离比较。发现导线与地物的距离不符合安全标准要求,将设定为危险点,发出预警的同时,提交坐标、危险等级等信息。以某220kV线路巡检为例采用Z5大型無人机搭载机载雷达进行线路走廊LiDAR点云数据采集。在完成线路导线矢量拟合的基础上,按照高程完成线路数据分割,可以得到条带状点云数据,其中包含多个线路点云子集。与原始点云相比,对于导线不相关的走廊地物进行了剔除,并且能够使地面点得到滤除,促使地物空间分布得到较好反映。如图1所示,结合地物空间几何分布特征,完成了植被、导线和杆塔点云数据分离。由于线路所在区域处于山区,因此不存在铁路、建筑物等地物。从检测结果来看,线路的两个杆塔间存在四个安全隐患点,还要进一步与安全标准进行比较,为人员开展工作提供依据。
考虑到杆塔点云密度较大,相邻杆塔点云密度将减小,可以完成杆塔分割,能够得到多段数据。对垂直线路走向的剖面进行测算,能够得到导线与地物的垂直距离、水平距离和净空距离[3]。采用相同方法,也能完成相邻杆塔剖面区段安全距离检测,确定周围地物与线路区段的安全距离。如表1所示,为提取得到的四个安全隐患点的安全距离诊断结果。通过人工方式对树障点进行查找,然后对实际距离值进行测量。通过比较发现,利用采集到的点云数据计算得到的安全距离诊断结果与人工测量值误差最大为0.14m,结果的一致性能够达到96.5%,最终可以判定确实存在安全隐患,能够达到巡检目标。
3 结论
综上所述,应用大型无人机开展电力巡检工作,可以利用采集到的空间阈机载LiDAR数据完成线路快速提取,得到精准矢量模型开展安全距离诊断工作。结合诊断结果对超限地物发出预警,能够帮助巡检人员掌握线路安全状况,及时完成线路安全隐患排查,继而为线路稳定运行提供有效保障。
参考文献
[1]李啸啸,范宝伟.机载LiDAR点云电力线数据处理及安全检测[J].测绘地理信息,2020,45(01):110-113.
[2]侯国瑞.激光LiDAR点云在电力巡线中的应用[J].经纬天地,2019(04):19-22.
