多领航者导引无人船集群的分布式时变队形控制
2020-06-03吴文涛古楠彭周华刘陆王丹
吴文涛,古楠,彭周华,刘陆,王丹
大连海事大学 船舶电气工程学院,辽宁 大连 116026
0 引 言
近年来,随着通信技术和嵌入式系统性能的快速提高,推动了无人船(USV)、无人机(UAV)和移动机器人(Mobile Robot, MR)等智能化设备的不断发展。无人船作为一种新兴的水面无人平台,得到了广泛研究[1-5]。迄今,单个无人船已可完成目标及路径跟踪和避障等任务,但面对复杂的海情,尤其是在执行军事、救援和鱼群探测等任务时,对无人船的作业效率和快速性提出了更高要求,单个无人船的能力和效率一般难以满足需要[6-9],而需要多个无人船或集群共同执行特定的作业任务。因此,为使无人船满足更高的应用要求,开展无人船编队的协同控制及提高智能化水平有着重要意义[10-11]。
目前,在无人船编队控制领域已开发了许多控制方法,其中具代表性的有基于图论的方法[12-13]、虚拟结构法[14]、领导跟随法[15]和人工势场法[16]等。上述方法中,基于图论的方法已得到深入研究。根据领导者类型,编队控制方法通常分为2 种:一种是由轨迹导引的协同控制,另一种是由路径导引的协同控制,后者的突出优势是空间约束和时间约束可以解耦[5,17]。此外,对于编队控制问题,还开展了许多分布式会聚和分布式编队控制研究。基于上述研究,编队队形可由编队跟踪控制器来决定,具体模式包括分布式编队避碰跟踪、领导跟随等[18-21]。对于无人船集群的分布式编队控制,目前的主要研究方向是多个领航者导引的非时变队形控制,其不足之处在于,根据给定的通信拓扑只能保持队形固定,不能应需而变,即在需求改变时,需要改变拓扑结构才能实现期望的效果,缺乏灵活性。与非时变队形控制相比,多领航者导引的分布式时变队形控制方法既可使多个USV 保持固定队形,也可产生时变队形,使其具有了队形灵活易变、操作简单等特点。若不执行任务,在多领航者的导引下,无人船集群可以采取固定的队形编队;若任务需求改变,则无需改变拓扑结构即可变换为所需的队形。
本文将主要研究含有模型不确定性和未知海洋环境扰动的欠驱动USV 集群在多领航者导引下的分布式时变编队控制问题。首先,在运动学层级,基于包含策略和操纵性原理,设计分布式时变队形制导律,通过USV 间及USV 与领航者间的信息传递关系设计基本队形,该制导律根据邻居信息(位置、前向速度和航向),在给定的时变输入信号下,计算出跟随船期望的航向及前向速度;然后,在动力学层级,基于扩张状态观测器(ESO),设计USV 的前向速度和艏摇角速度控制律,以减小模型不确定性和未知海洋环境扰动带来的影响;最后,通过对级联系统稳定性的分析,证明无人船集群时变编队闭环控制系统输入状态的稳定性,并通过仿真验证方法的有效性。
1 问题描述
如图1 所示,本文考虑由M个双桨USV 和N~M个虚拟领航者组成时变编队系统。图中:pi=(xi,yi),为第i∈M个USV 在NED(North-East-Down)坐标系XE−YE下 的 位 置 坐 标; φi为 第i个USV 在NED 坐标系下的航向角; θk为 第k∈[M+1,N]条参数化路径的参数变量。
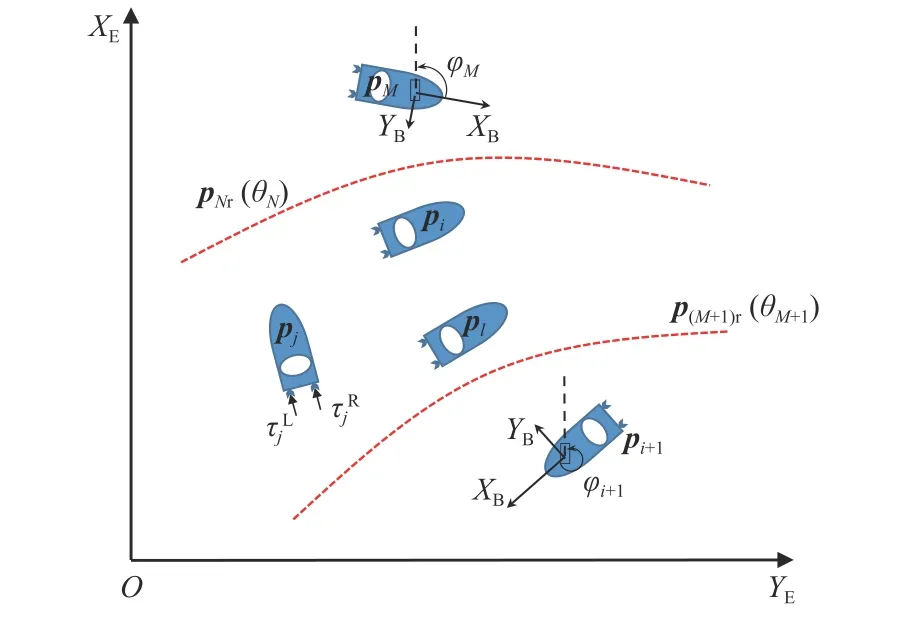
图 1 时变编队系统结构Fig. 1 System structure of time-varying formation
第i个USV 的运动学可用式(1)所示的状态方程表示[22]。

式中,ui, νi和ri分别为船体坐标系(Body-Fixed Reference Frame)XB−YB下 第i个USV 的 前 向 速 度、侧向速度和艏摇角速度。
根据无人船在水面航行时的水动力学方程,可得USV 的动力学方程如式(2)所示[23]。
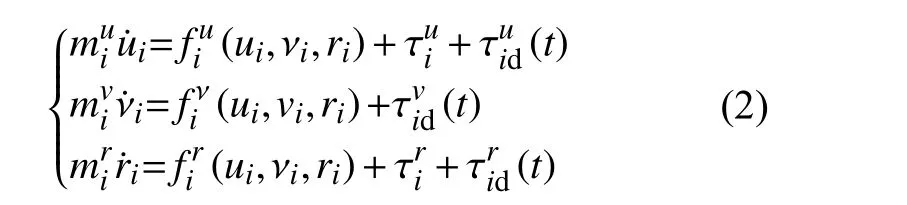

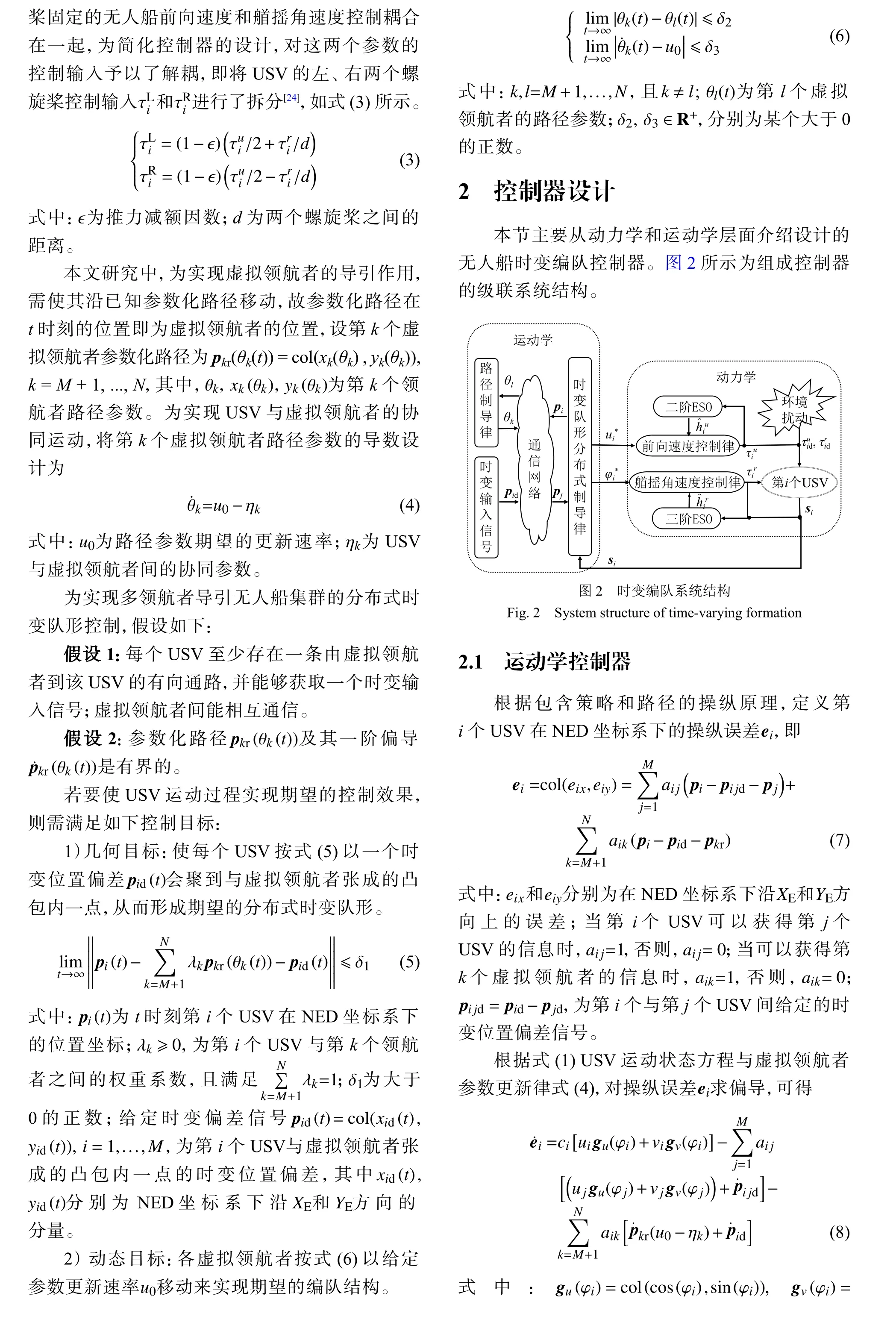


图5 和图6 表明,所有USV 在NED 坐标系下的跟踪误差在稳态时收敛到阈值以内,并在该范围内上、下波动。图7~图10 给出了USV 的实际速度与期望速度,以及实际航向与期望航向曲线。由图可以看出,基于ESO 设计的前向速度控
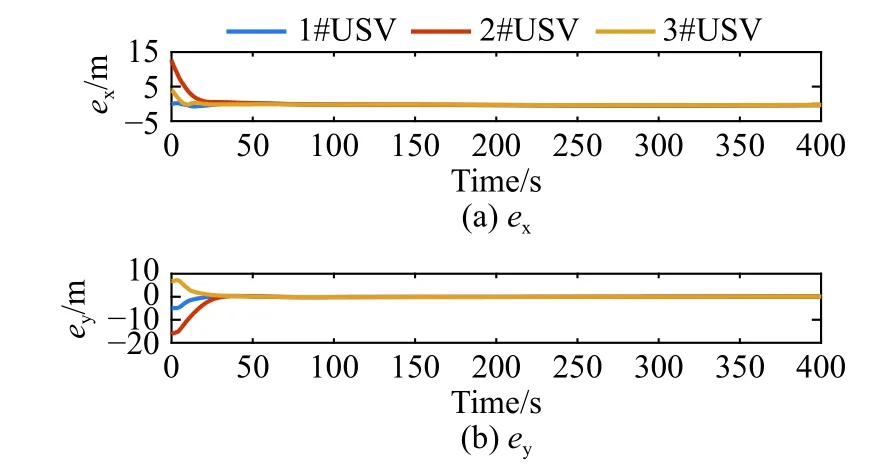
图 5 1#~3# USV 在NED 坐标系下的跟踪误差Fig. 5 1#-3# USVs' tracking error of the NED reference system
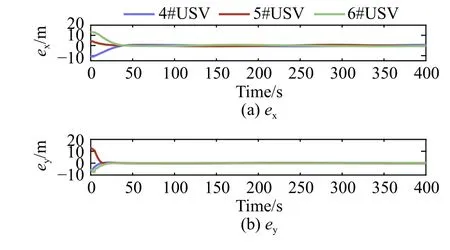
图 6 4#~6# USV 在NED 坐标系下的跟踪误差Fig. 6 4#-6# USVs' tracking error of the NED reference system

图 7 1#~3# USV 的实际速度和期望速度Fig. 7 Actual speed and desired speed of 1#-3# USV
制律和艏摇速度控制律可以使USV 在较短的时间内跟上期望值,并保持期望值运动。其中,各图中的的物理量分别表示如下:u1~u6为实际速度,为期望速度(图7, 图8); φ1~ φ6为实际航向,为期望航向(图9, 图10)。
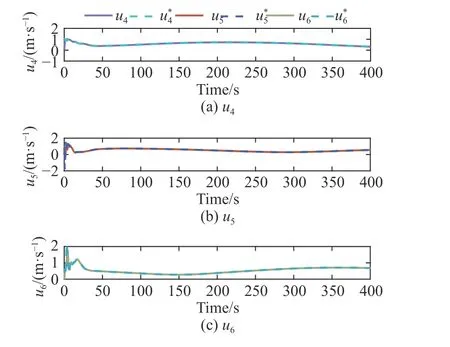
图 8 4#~6# USV 的实际速度和期望速度Fig. 8 Actual speed and desired speed of 4#-6# USV
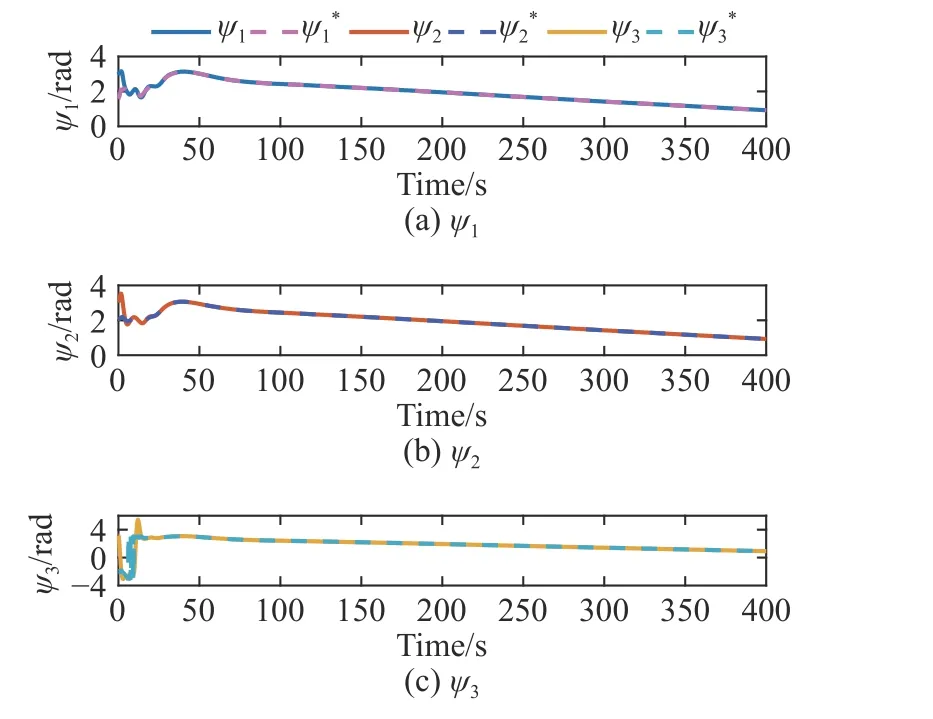
图 9 1#~3# USV 的实际航向和期望航向Fig. 9 Actual heading and desired heading of 1#-3# USV
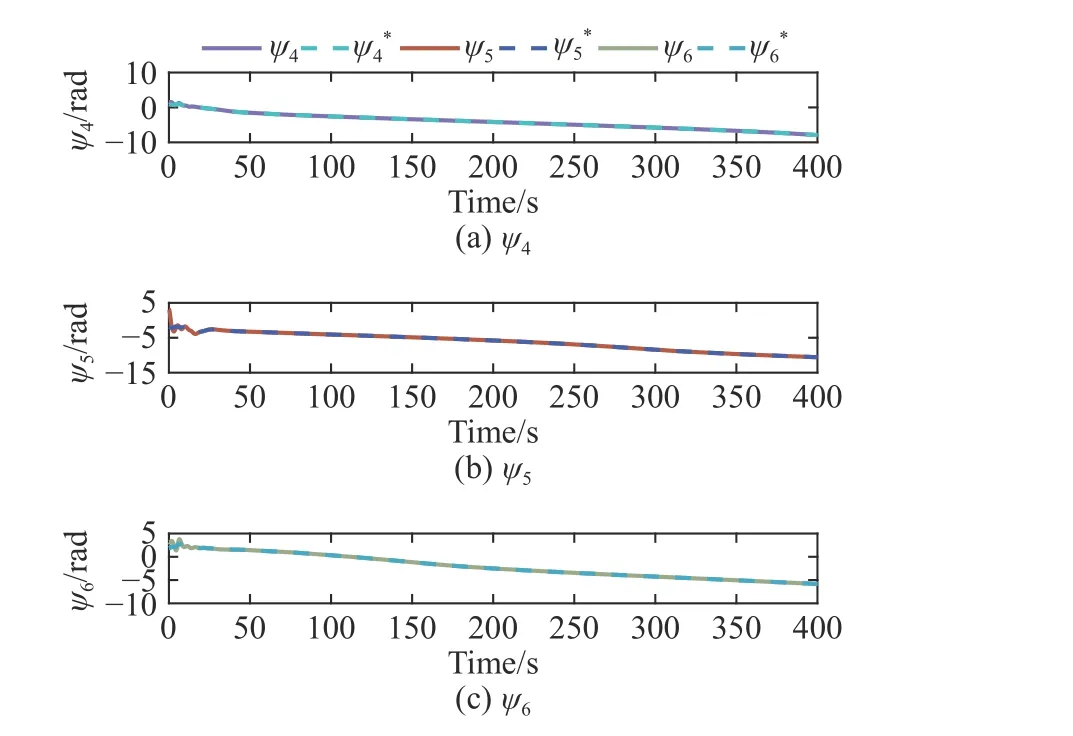
图 10 4#~6# USV 的实际航向和期望航向Fig. 10 Actual and desired heading of 4#-6# USV
图11 和图12分别给出了所有USV 在u方向推力的控制输入曲线和r方向的控制输入转矩曲线。图13 所示为2 个虚拟领航者路径参数的变化曲线。结合图4可以看出,由于给定USV 的初始位置落后于虚拟领航者,为实现虚拟领航者与USV 间的协同,路径参数以负值更新,以使虚拟领航者向USV 靠近,当与USV 接近后开始协同绕图4 所示的圆环运动。
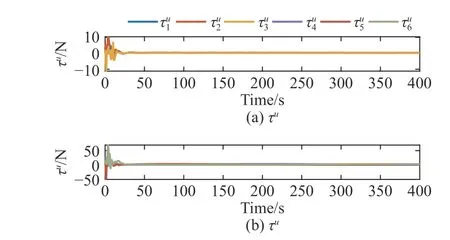
图 11 所有USV 的在u 方向的推力控制输入Fig. 11 Control input of all USVs' thrust in the u direction
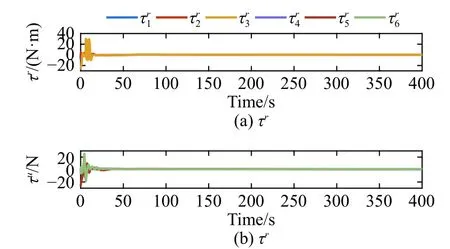
图 12 所有USV 在r 方向的力矩控制输入Fig. 12 Control input of all USVs' torque in the r direction

图 13 虚拟领航者的参数更新曲线Fig. 13 The parameter update curves of virtual leader
5 结 语
本文主要介绍了含有模型不确定性和未知海洋环境扰动时USV 集群由多领航者导引下无人船集群的分布式时变队形控制问题。首先,在运动学层级,运用包含策略和路径操纵的基本原理,设计了基于邻居信息(位置、前向速度和航向)的分布式时变队形制导律;然后,在动力学层级,设计了基于ESO 的前向速度和艏摇角速度控制律,估计了USV 在航行过程中存在的模型不确定性以及未知海洋环境扰动;最后,通过级联系统稳定性分析,证明了无人船集群时变编队闭环控制系统输入状态的稳定性,通过仿真结果也验证了该方法的有效性。
