无轨胶轮车制动失效阻拦系统试验
2020-06-02任肖利
任肖利
(中国煤炭科工集团 太原研究院有限公司, 山西 太原 030006)
0 引言
目前防爆无轨胶轮车得到广泛的应用,然而防爆无轨胶轮车因超速行驶、刹车失灵或挂档失败造成的无轨胶轮车速度失控跑车现象屡有发生[1],一旦发生无轨胶轮车跑车事故,都将造成严重的人员伤亡事故[2]。
根据《煤矿安全规程》392条规定,无轨胶轮车在长坡段巷道内行驶时,必须采取车辆失速安全措施,以保证无轨辅助车辆的安全可靠性[3]。因此,有必要设计一种可实现制动失效后,对车辆能进行有效地阻拦的阻车系统。
1 制动失效阻拦系统设计
根据无轨胶轮车的使用特点及井下工况,对制动失效阻拦系统进行设计,该系统主要包括:
1) 安装于胶轮车上的设备控制器、尾部拖钩机构、测速传感器、脱钩检测传感器、报警器等。
2) 安装于井下巷道的吸能装置、阻拦索、超速检测控制器等[4]。
1.1 车载设备
1) 尾钩机构控制器。如图1所示,控制器固定于车架上,当控制器接收到司机发出的脱钩指令或者接收到测速传感器的超速信号时,会提示报警,在持续一段时间后,将会控制尾钩机构电磁铁动作,释放尾钩,以便尾钩能准确及时的落到地面。控制器可通过调整内部程序实现任意速度下的脱钩动作[5]。
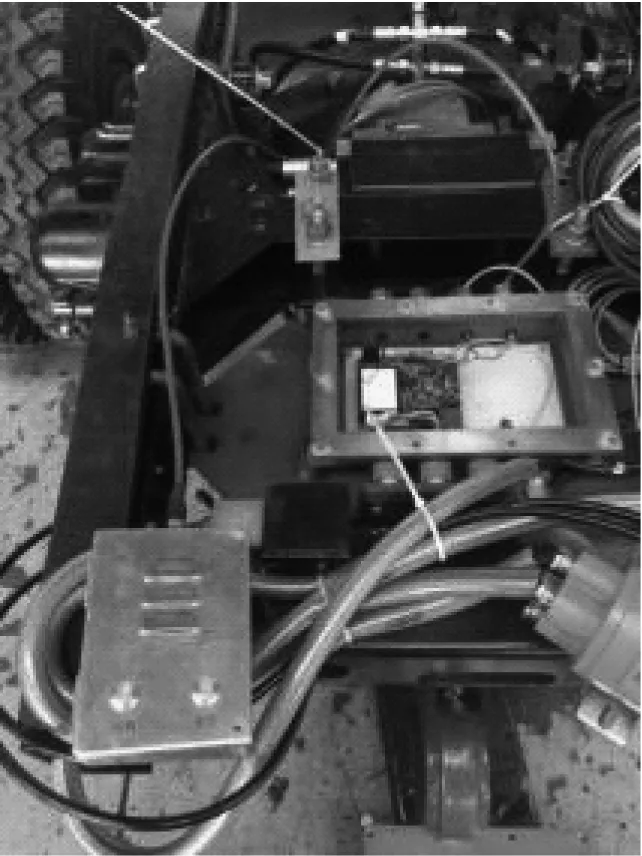
(a)
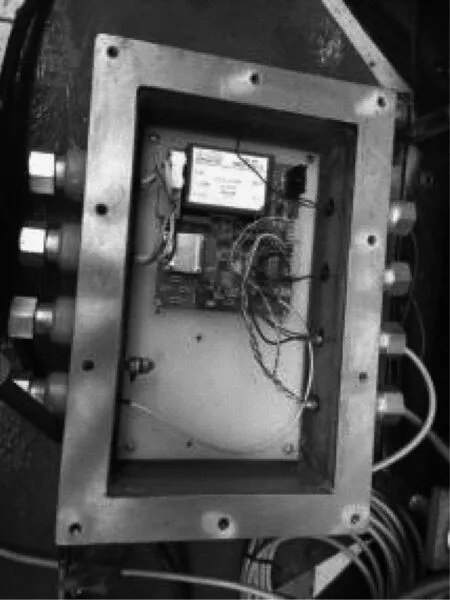
(b)
2) 尾部拖钩机构。如图2所示,拖钩机构固定于车架后方,其主要作用是钩住阻拦装置钢丝绳,当车辆速度失去控制时,可自动或手动释放,释放后尾钩紧贴地面随车辆前行,当与阻拦索相遇时被阻拦索钩住,连接阻拦索的吸能装置对车辆产生一个与运动方向相反的阻拦阻力,使车辆减速制动,缓冲一定的距离后,车辆平稳停止[6]。整个制动过程,被牵引车辆受到向后的制动力,并不会有侧向力产生,车辆无侧翻的危险[7]。

(a)

(c)
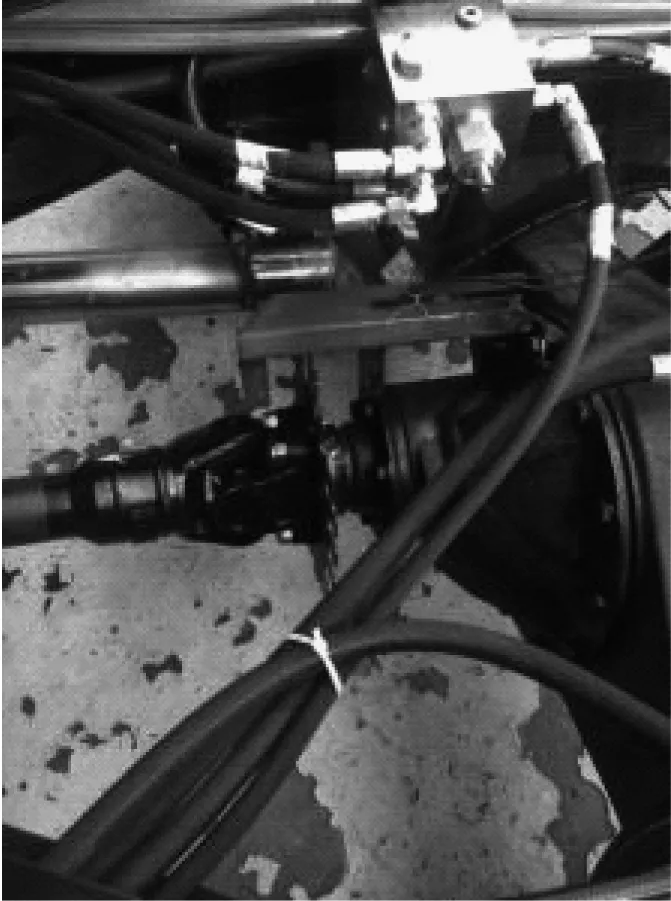
3) 测速传感器。如图3所示,传感器通过固定支架固定于桥壳上,测速齿圈通过螺栓固定于传动轴上,当传动轴转动时,带动测速齿圈一起旋转,测速传感器接收测速齿圈的转动速度,自动转变为车辆的行驶速度[8]。
4) 矿用本质安全型位置传感器。主要用于检测尾钩机构是否完成释放,可将尾钩机构的实时位置传送到车载无线基站[9],脱钩检测传感器见图4。

(a)
(b)

图4 脱钩检测传感器
5) 报警器。当车辆发生速度失控制动失效的现象时,用来反映尾钩机构的位置,当尾钩机构释放时,报警器发生报警,提示驾驶员尾钩已释放,报警器装置见图5。
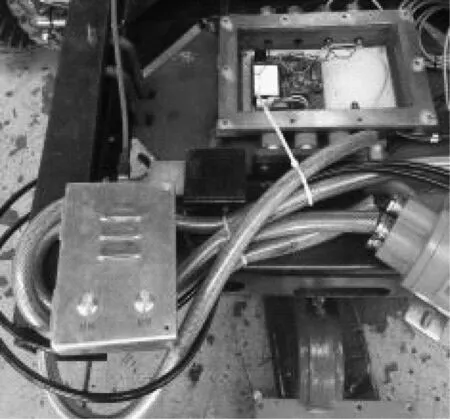
图5 报警器装置
1.2 巷道设备
巷道设备包括吸能器、阻拦索、超速检测控制器。
1) 吸能器。如图6所示,吸能器主要通过阻拦索输出阻力,阻拦索与尾钩完全钩住时,车辆的动能被吸能器吸收,使车辆发生减速制动,最终完全停车。整个缓冲制动过程为柔性缓冲,制动过程始终在人体可承受范围内。

图6 吸能装置
2) 阻拦索。阻拦索与吸能器连接,阻拦索横跨井下巷道,在被尾钩机构钩住后后,由于受到吸能器的作用,使车辆制动停止[10],阻拦索见图7。

图7 阻拦索
2 现场试验
为验证整套速度失控保护装置的使用功能,在生产基地对该系统进行了现场试验。现场试验见图8。

图8 速度失控保护装置现场试验
2.1 试验设备及场地
1) 试验车辆。采用WC20R(D)平头运人车,该车辆是目前各大矿井使用广泛的运人车辆,故在该车上试验具有一定的参考价值。WC20R(D)平头运人车的主要技术参数: 适用巷道最大坡度14°,车辆总质量4 500 kg。
2) 试验场地。图9为试验现场布置图,在整个试验过程中,综合考虑各个路口及每个路段的实际路况,确定试验现场布置方案。试验过程中,试验车辆从出发位置开始,通过加速区域109 000 mm进行车辆加速,当达到试验车速时,尾钩即自动脱落,尾钩脱落需在加速区域内完成。吸能器分别布置于厂房门口和另外一侧,此处布置有跳绳机构,在车辆速度失控超速时(见图10),发出跳绳信号,跳绳机构将使钢丝绳自动弹起,使尾钩在此处钩住钢丝绳,通过减速区域105 000 mm,吸能装置开始作用,车辆开始减速,减速距离远远大于钢丝绳的最大伸出距离,最终车辆在减速区域内停车。
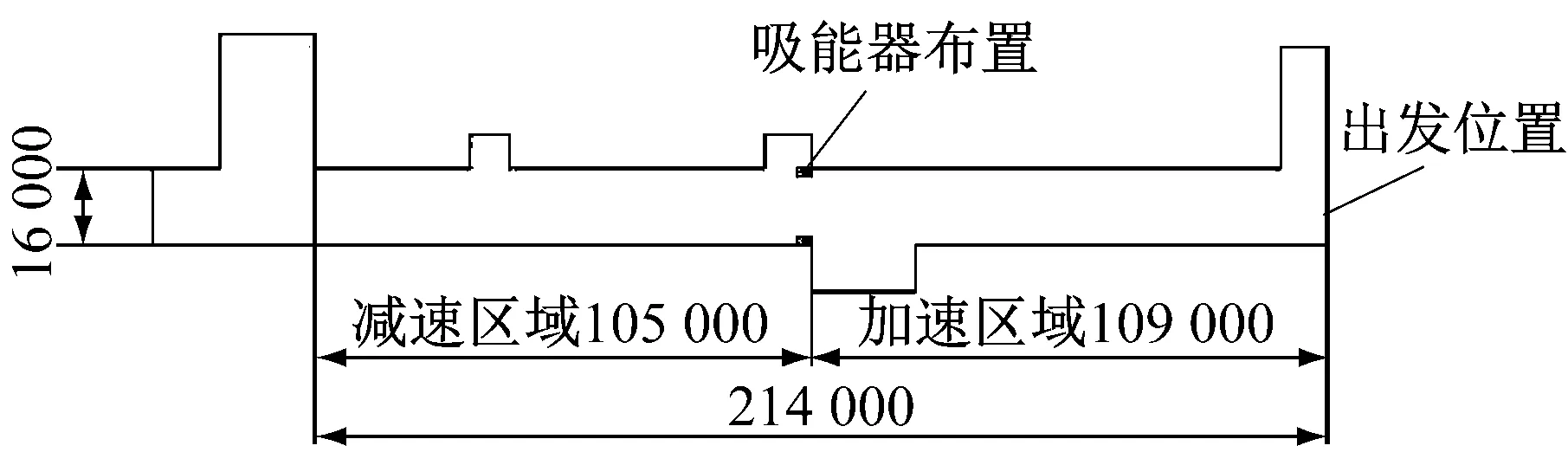
图9 试验场地及装置分布

图10 速度失控保护装置现场试验
3) 尾钩机构布置。尾钩机构是整套系统最关键的部分,该机构能否正常的脱钩或者进行其他动作,将直接影响着整套系统的使用性能,本项目试验尾钩机构采用U型螺栓,将尾钩机构固定于车架大梁上,保证尾钩机构的机构稳定性及可靠性,同时合理的布置U型螺栓的位置,保证车架大梁可承受相对较大的弯矩及扭矩,如图11所示。

图11 尾钩机构在整车上的装配
4) 吸能装置布置。在厂区内采用车间已有两个5 t试验块将吸能装置固定座压紧,将吸能装置通过螺栓固定于吸能装置固定座上,10 t试验块与地面之间的静摩擦力足以提供试验车辆的最大制动力,因此采用此种固定方式,见图12。

图12 吸能器现场固定
2.2 试验结果分析
试验表明,车辆速度失控保护系统采用吸能器吸能制动,柔性缓冲效果明显,车辆在时速20~30 km/h,4.5 t空载车辆时速20 km时,制动距离在10 m以上,4.5 t重载车辆时速30 km时,制动距离在65 m以内,制动减速度始终在技术要求0.5g~2.5g的范围内,完全在人体所能承受的制动减速度范围内(人体能够承受5g的制动减速度),司机及乘员无不良生理反应,详见表1。
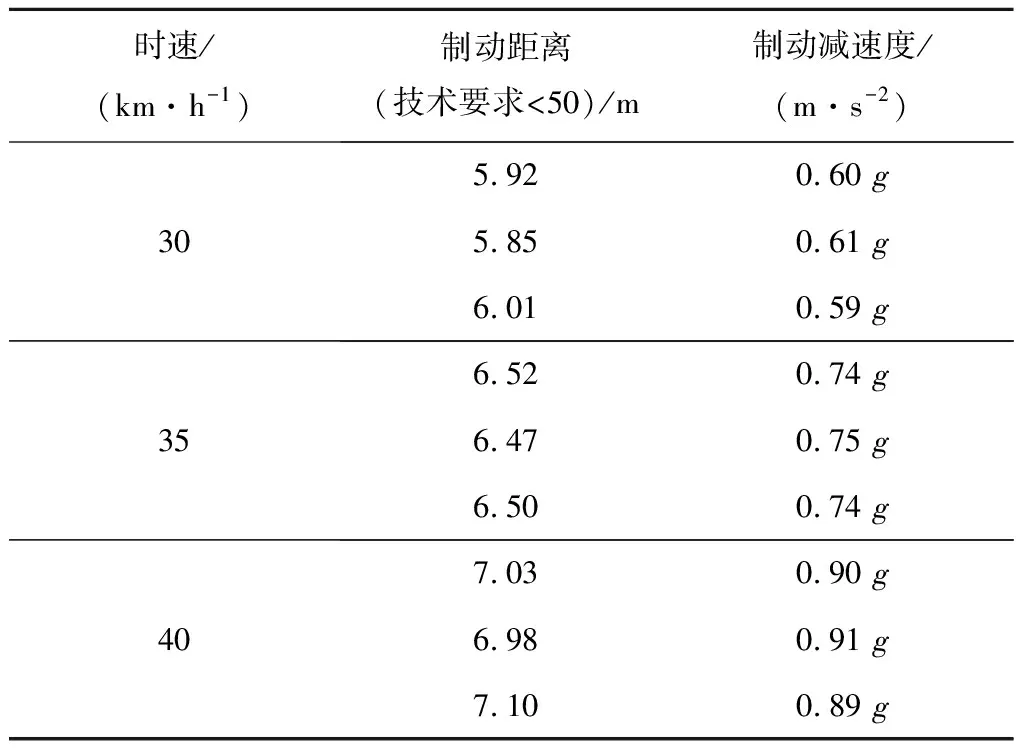
表1 试验数据记录
3 井下工业性试验
工业性试验以无轨胶轮运人车为载体平台,主要验证:
1) 在煤矿井下车辆以一定速度行驶(为保证人员安全,速度控制在25 km/h以下),驾驶员未进行制动操作,模拟车辆速度失控状态。在该状态下,速度失控智能保护系统的工作机构可正常动作,并有效完成车辆的阻拦。
2) 在15 km/h、20 km/h、25 km/h 3个不同的速度段,车辆最大制动距离均小于30 m,制动减速度均位于0.5g~2.5g,司机及乘员在保护系统制动过程中无不良生理反应。
工业性试验数据见表2。在试验时,驾驶员不进行制动操作,待车速达到预设报警车速时,失速智能保护装置开始正常动作,对车辆进行阻拦制动,最终使车辆安全平稳的停靠,整个试验过程中最大制动距离始终满足要求,司机及乘员在制动过程中未出现不良身体反应,试验表明该装置可在无轨运输矿井中进行使用,可有效防治制动失效造成的跑车现象,保障井下作业人员的安全。
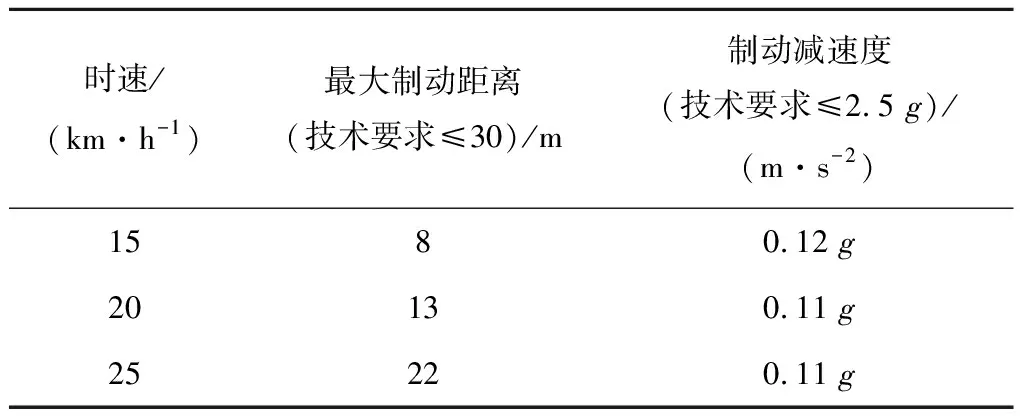
表2 工业性试验数据记录
4 结论
无轨胶轮车因制动系统性能不稳定,容易出现速度失控的安全隐患事故,故设计的无轨胶轮车制动失效阻拦系统必须通过井下工业性试验,由试验数据表明,该系统具有较强的阻拦稳定性与可靠性。
