垂直起降矢量串列翼无人机的设计与制作
2020-05-26刘昭李德宝
刘昭 李德宝
摘 要:民用无人机发展多年,充分应用于物流,植保等领域。根据应用特色和优缺点,主要分为固定翼和多旋翼式。本文旨在设计一种混合翼无人机。解决城市起降空间狭窄,空中稳定性要求高;旋翼机飞行效率低,巡航速度慢等问题,通过双桨差速及舵面提高机动能力,调整飞控PID增强自稳能力;各个系统模块独立,便于安装维修。设计制作均采用计算机辅助进行,便于验证和修改。
关键词:垂直起降;串列翼;模块化安装
0引言
无人机,英文全称为Unmanned Aerial Vehicle,即无人驾驶空中飞行器,通过无线电遥控设备或自带的飞行控制装置操控的无人飞机。一般由三部分组成,包括无人机主体、控制装置及负载。若从机体结构方向分类,可以把无人机分为固定翼无人机和旋翼无人机。固定翼无人机需要机翼提供充足的升力,因此一般机体宽度长度较大,机械结构相对复杂,同样也提高了对无人机操作者的要求。在旋翼无人机中 ,可以大致分为单旋翼无 人机和多旋翼无人机。单旋翼无人机就是我们平时所说的直升机 ,而多旋翼无人机则包括四旋翼、六旋翼、八旋翼甚至更多旋翼的飞机。其中,四旋翼无人机因其结构简单,飞行稳定二被广泛应用于民用的各个领域。对比来看,相比于固定翼无人机,多旋翼无人机具有起飞所需场地小,可低空飞行,工作稳定,特别是可悬停的优点。但仍存在不足,如能量效率低导致活动半径小。
随着工业产业升级,各行各业尤其是需要短途快速运输或空中作业的岗位,
如城市中交通不便导致原先点对点的快递外卖效率低下,电力巡检时,既需要快速巡航,查找问题,又需要对故障处拍摄等操作。因此迫切需要一种能具有固定翼飞行速度快工作半径大的特点,兼顾多旋翼机起降简单可悬停优点的复合型无人机
1 特点分析
该垂直起降无人机具备以下优点:
(1)将旋翼机与固定翼的特点相结合,起飞和降落时的起降方式与旋翼机相同,垂直进行,占地空间小,无需跑道,在飞行途中采用固定翼水平飞行,巡航速度与固定翼接近,同时能量效率相比旋翼机大大提升。
(2)转弯采用电机矢量控制,通过改变两个电机的轴线指向操纵方向
(3)旋翼机模式与固定翼模式的切换,通过悬停时两电机差速产生转矩,完成切换。
(4)安装飞行控制模块,可通过主动调节来减少飞行过程中的晃动,保证飞行平稳。
(5)杆件之间采用扎带交叉捆扎,成本低,整体调节方便,易于灵活修改。
2 飞机整体结构设计
2.1 主机身
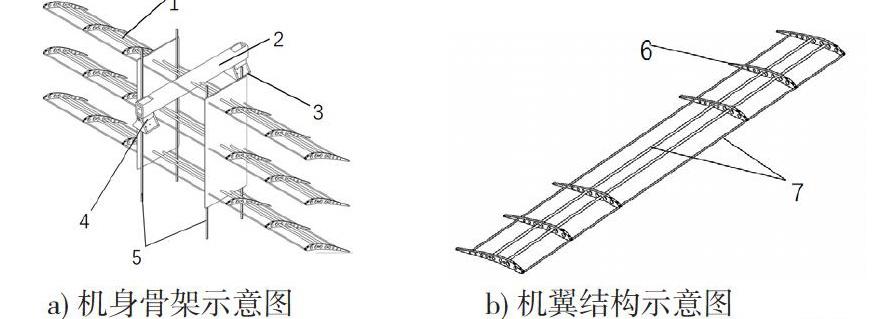
如图所示,该无人机采用凹凸翼2032cjc,,翼型相对厚度较小。纵向骨架为3mm和5mm碳纤维杆交替使用,提高抗弯扭强度。采用5mm厚度的巴尔沙木制作翼肋,减轻重量,同时给蒙皮提供较大的蒙皮附着面积。
2.2 动力装置
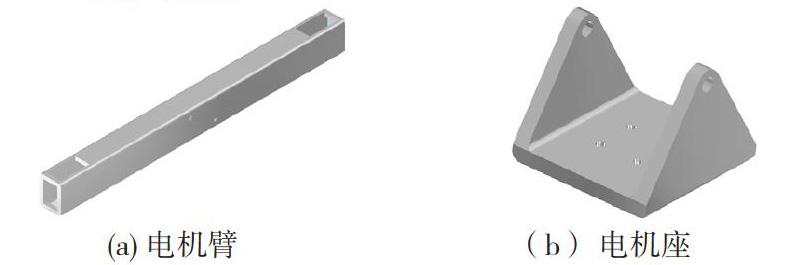
电机臂为方型碳管,中部侧向钻孔保证机翼碳管穿过固定,两端竖向切出方孔,固定倾转舵机。舵机上装有U形电机座摇臂,摇臂上设置四个电机安装孔,以固定无刷电机。舵机行程为-45°~+45°
3 三维模型的制作
3.1部分零部件
3.2各个机体部件
(1)机翼
机翼凹凸翼2032cjc,平飞性能好1)机翼采用较大翼展,产生升力大,提高运载量;2)光滑蒙皮,减小摩擦阻力,提高飞行速度和航程。
(2)电机座
因该型无人机采用半矢量控制,故电机固定于舵机摇臂上。机动灵活,反应迅速。
(3)起落支撑结构
起落架由数根斜置弹性纤维棒,可充分吸收降落时对机身造成的冲击。同时,整体呈梯形的起落架,一定程度上防止飞机在起飞前因迎面方向的风翻倒。
4 飞行控制原理:
4.1 动力系统的矢量偏航控制:该无人机采用双螺旋桨反推提供升力平飞时,通过控制倾转舵机使电机绕机体坐标系的Z轴旋转产生偏航的力矩,减少了舵面的使用,降低机翼结构复杂度。
4.2旋翼机模式与固定翼模式切换:在垂直起飞至一定高度后,通过遥控器差速控制,使机翼上方螺旋桨转速大于下方螺旋桨转速。从而产生绕Y轴旋转的俯仰力矩,降低迎角。
5 结语
本项目根据生产环境需要及市场需求,制作出结合旋翼机和固定翼两方特点的垂起固定翼无人机,同时采取串列翼布局,提高气动效率,利用CAD技术实现无纸化设计制作,且便于装配过程发现问题时及时修改。
参考文献
[1]王冠林,武暂.垂直起降无人机总体方案分析及控制策略 综合研究[J].飞机设计,2006(03):25—30.
[2]全权.解密多旋翼发展进程[J].机器人产业,2015(2):72-83.
[3] 张啸迟,万志强,章异嬴,杨超. 旋翼固定翼复合式垂直起降飞行器概念设计研究 [J]. 航空学报,2016,v.37(01):179-192.
[4]赵长辉,杨五兵,李波,等.固定翼四旋翼复合飞行器[C]//2014(第五届)中国无人机大会论文集.北京:中国无人机协会,2014:6.
[5]陈滔,孟琳,李楠,叶永强.飞机垂直,短距起降技术的研究 [J].现代电子技術,2014(23).1l0一114.
[6]杨军,吴希明,凡永华等.倾转旋翼机飞行控制[M].北京:航空工业出版社,2006.
[7]凌和生.新型垂直起降飞机 V-22“鱼鹰”偏转旋翼机.江苏航空,2007(1)
