路面沥青摊铺3D测量控制技术应用分析
2020-05-25梁家心
梁家心


文章总结了3D测量控制技术在高速公路沥青路面摊铺中应用的原理和控制要点,提出采用路面沥青摊铺3D测量控制技术可以提高沥青路面的摊铺速度并控制路面平整度,从而提高施工效率和降低施工成本,为类似工程施工提供参考。
沥青路面;3D测量控制技术;摊铺
U415.6-A-09-027-3
0 引言
近年来随着我国交通事业的投入加大,高速公路建设取得了很大的发展,对高速公路路面平整度的要求也越来越高,以保证行车的安全性和舒适性。沥青路面摊铺是一个高度动态的过程,施工过程和施工管理极为复杂,如何应用先进的技术手段提高施工质量、效率是所有建设者们共同追求的目标。数字化的施工与管理是大型建设工程现代化的需要,也是数字化时代的必然趋势,数字化施工受到越来越多国内外施工单位的青睐。徕卡3D摊铺控制系统无须放样、打桩、挂线等复杂繁重的操作,可以实现完全自动的摊铺高度、坡度和摊铺方向的控制,达到简单、快速、精准地完成摊铺施工的目的。
1 工程概况
柳州至南宁高速公路改扩建工程№8合同段路面施工起点桩号为K1324+500,终点桩号为K1379+500,路段全长55 km。沥青路面结构为:8 cmAC25沥青混凝土下面层+6 cmAC20沥青混凝土中面层+4 cmSMA改性沥青混凝土表面层。阳朔至鹿寨高速公路工程№.TJ2标段,起点里程桩号为K30+000,终点桩号为K94+167.382,主线全长56.567 km。主线沥青路面结构为:8 cm粗粒式沥青混凝土下面层+8 cm粗粒式改性沥青混凝土中面层+4 cm细粒式改性沥青混凝土表面层。这两个项目均采用徕卡3D摊铺控制系统测量放样,取得了良好的效果。
2 徕卡3D摊铺控制系统
使用徕卡测量机器人可以实时获取机器所处的位置、高度和坡度等信息,并将这些信息和设计的摊铺数据进行对比,然后将对比差值传送给机器的液压系统,从而实现完全自动的摊铺高度、坡度和摊铺方向的控制。Leica PaveSmart 3D数字化摊铺自动控制系统主要由Robot61全站仪基准站和摊铺自动控制系统组成。系统工作时,架设在控制点上的机械控制全站仪将捕获安装在摊铺机桅杆上的360°棱镜的三维坐标数据,通过摊铺机系统上的数据传输电台实时将棱镜坐标数据传送到摊铺自动控制系统的MPC1310控制箱中,控制箱将获得的当前坐标信息与设计卡中的三维数据进行对比,生成相应的高程修正信息并传递至摊铺机左右两侧边控箱,再由边控箱对应生成相应的比例驱动信号,通过液压阀驱动摊铺机牵引臂液压油缸使熨平板进行相应方向的调整和修正,从而使摊铺道面产生坡度和高程变化,弥补路面波动,实现所要求的路面平整度。在具体施工过程中为实现道面摊铺的精确控制要求,另一台测量全站仪一直处于监测道面摊铺状况,真正实现过程监控施工,满足摊铺设计要求。
每套Leica PaveSmart 3D摊铺机控制系统建议配置三台Robot61全站仪,其中两台机械控制全站仪主要用于引导PaveSmart 3D摊铺自动控制系统现场施工,另外一台测量全站仪用于实时检测已摊铺面与设计面偏移量和摊铺过程中的“蛙跳”。3D摊铺自动控制系统主要由三维位置定位系统、车载控制系统和3D摊铺辅助软件等三部分组成。摊铺自动控制系统车载设备主要包括1台主控制器、2台控制手柄、两个360°棱镜、1个横坡传感器、2台车载电台、两个接线盒以及连接线缆等(见图1)。
2.1 摊铺数据准备
内业数据准备工作主要是将传统的工程设计部门提供的施工设计数据和图纸进行三维数字模型建立,即利用3D摊铺系统配套的软件将原有的工程二维设计蓝图转化成机械设备、测量设备能够自动识别的三维电子设计图。Leica iCON Office Software软件很好地解决了二维设计图转换成三维数字模型这一难题。
2.2 施工现场准备
具体施工前正确连接PaveSmart 3D控制系统各个元部件,设置施工表面相对于设计表面的正确偏移量,作为引导基准的全站仪追踪到360°棱镜后系统即可在手动状态下进行施工。由于系统采用高程+坡度控制,所以当摊铺机在填筑表面左右高程满足设计要求并稳定后需要对系统的高程和横坡传感器进行校准。校准完成后系统开始在自动模式的状态下进行摊铺工作,在施工过程中通过微调控制器左右两侧上升下降按钮的偏移量来满足摊铺表面左右高程要求。
3 徕卡3D摊铺施工控制要点
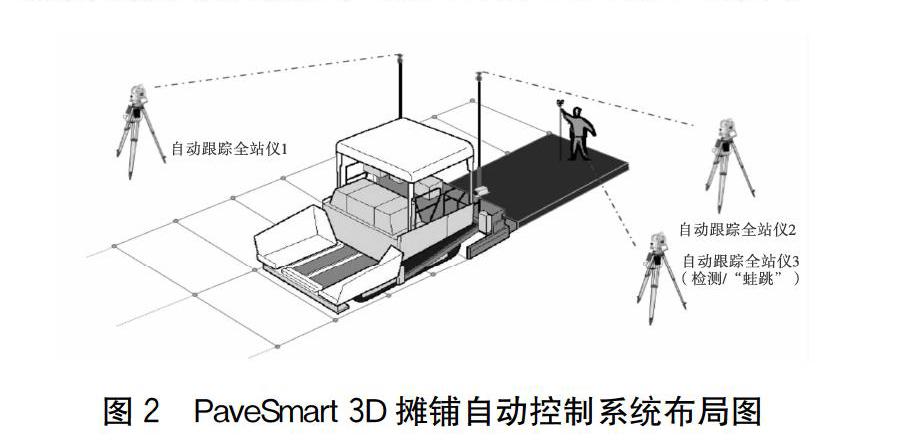
具体施工时选择合适位置架设好左右两台全站仪,最好采取一前一后的布局,这样可以避免两台全站仪同时搬站,而且第三台全站仪可以交替搬站。由于每台全站仪在自动跟踪模式下精度会有所降低,所以推荐在半径150 m范围内作业,精度满足要求,这样每台全站仪控制300 m距离后需要进行搬站作业。如果有备用全站仪,在搬站过程中需要先将备用全站仪自动跟踪到需要换站一侧的棱镜上,在车载电脑上点击切换按钮,系统会自动将新站作为控制站进行不间断作业。若没有备用全站仪,在搬站过程中摊铺机需要停下等待搬站完成并且数据传输无误的情况下才能继续作业。如图2所示。
3.1 摊铺控制
在沥青摊铺前要检查摊铺机各仪器和部件是否工作正常,提前预热熨平板。摊铺机在正常攤铺过程中行走速度控制在2~2.5 m/min,速度要保持匀速,遇到下雨或者料车囤积较多的时候才可以适当增加速度。调高速度的时候要注意同时调高夯锤和震动的频率,但最大行走速度不能超过3.5 m/min。摊铺机摊铺过程中,不能随意待机,要保证摊铺的连续性,特殊情况除外。摊铺过程中,70#沥青不收料斗,改性沥青5~6车料收一次斗,以减少离析。
3.2 平整度控制
(1)测量数据要准确,感应器要注意观察不能误操作,摊铺机尽量不停机,料车不能冲撞摊铺机,摊铺机过桥梁隧道时要放慢速度。
(2)压路机的速度要保持匀速一致,起步剎车时速度要慢,碾压段落要长距离,每次停机的位置不能同在一个地方。
(3)结构物过渡段无论是哪个结构层都要拉导线或者垫找平仪探头,如果结构物高差比较大或者路面起伏比较大可以提前铺一层调平层。
(4)桥面中面层摊铺前用沥青铺筑临时伸缩缝,保证伸缩缝位置的沥青面层平整度。
(5)现场管理人员必须要熟悉每台设备的性能,每台摊铺机起步时是偏高还是偏低,以确定垫板的厚度。
(6)熨平板的温度必须≥100 ℃,摊铺机铺出2 m后要蹲下身子观察接头位置是高是低,然后采用“高修低补”的原则进行处理。
(7)接头处用钯和细料补完之后让压路机以45°角静压一遍,小振一到两遍,速度要慢。
(8)在碾压过程中要用3 m尺跟踪测控平整度,如果45°碾压还是高的,可以用90°横压。
阳朔至鹿寨高速公路工程№.TJ2标段施工设备及参数如表1所示。
4 徕卡3D摊铺控制系统应用效益
利用Leica 3D摊铺控制系统摊铺,采用全站仪引导进行精准数字化施工作业,将设计数据直接转化为施工数据,无需放样、载桩、挂线等工作,简化施工流程,节省人力成本,在确保摊铺标高的同时兼顾了摊铺面的平顺性和平整度。同时,有效控制层厚,可以节省材料,减少不必要的材料浪费,实现了传统施工中无法实现的自动变坡施工等技术问题,使复杂的摊铺施工简单化。系统施工不受光线影响,可以24 h全天候施工作业。
5 结语
本文结合徕卡3D摊铺控制系统技术在柳州至南宁高速公路改扩建工程和阳朔至鹿寨高速公路工程沥青路面摊铺的应用,总结3D摊铺控制系统在山区高速公路施工中的控制要点,从而达到提高高等级沥青路面平整度,提高行车安全和舒适性的目的,同时提高了施工效率,大大降低了施工成本,可为其他高速公路沥青路面摊铺施工控制提供参考。
[1]JTG F40-2017,公路沥青路面施工技术规范[S].
[2]JTG D50-2017,公路沥青路面设计规范[S].
[3]JTG F80-2017,公路工程质量检验评定标准(第一册 土建工程)[S].
