TS60测量机器人在竖井联系测量中的自动化应用
2020-05-25王葳岭
王葳岭
摘要:本文主要简述一种提高地铁竖井联系测量效率的基于TS60测量机器人的自动化应用方法。
Abstract: This article mainly outlines an automated application method based on TS60 measurement robot to improve the efficiency of metro shaft contact measurement.
关键词:TS60测量机器人;竖井联系测量;自动化应用
0 引言
随着近年来城市交通压力的不断增大,地铁作为一种城市高效便捷的交通手段,正在城市成为居民首要出行手段,受到越来越多的关注。地铁出行大大提高了城市居民的出行效率,还有效减小地面机动车的出勤率,间接缓解城市拥堵。一个城市轨道建设的成熟度一定程度成为其发展程度的标志。我国主要城市同国外发达城市在地铁密度方面还存在较大差距,可以预见从现在开始至未来很长一段时间我国主要城市都将是地铁大发展大建设时期。近几年我国各大城市的也确实都处在地铁项目施工的热潮中。本文主要是通过介绍一种运用TS60测量机器人及内置多测回测角软件的施测方法来探究竖井联系测量作业的自动化应用及数据处理。
1 联系测量自动化应用的意义
竖井联系测量是地铁测量工作中一个尤为重要的又需要付出很大时间和精力的关键环节。为了控制地铁盾构区间施工精度,基本每掘进一定距离就要进行一次控制网联测,地铁控制网的联测包含地面控制测量、联系测量以及地下控制测量三部分。相较而言地面控制测量以及地下控制测量属于传统导线测量,自动化技术比较成熟,施做效率相对高效,而联系测量方面自动化技术一直存在不足,虽然激光垂准仪应用相对传统吊丝法效率也有较大提升,但是不适用于许多埋深较深的地铁项目,一些埋深较深的地铁项目仍然依赖传统的吊钢丝法竖井联系测量。吊钢丝法对测量环境要求较高,项目不停工基本无法进行,现场往往要停工施测并且耗费时间也较长,同时现场涉及大量手算记录资料,后期处理也比较繁琐,费时费力,施测人员整个流程下来也很辛苦。本文介绍的方法相比较传统测量方法,无需手算记录,同平差后处理软件无缝衔接,施测速度效率大大提高。
2 联系测量形式及传统测量方法
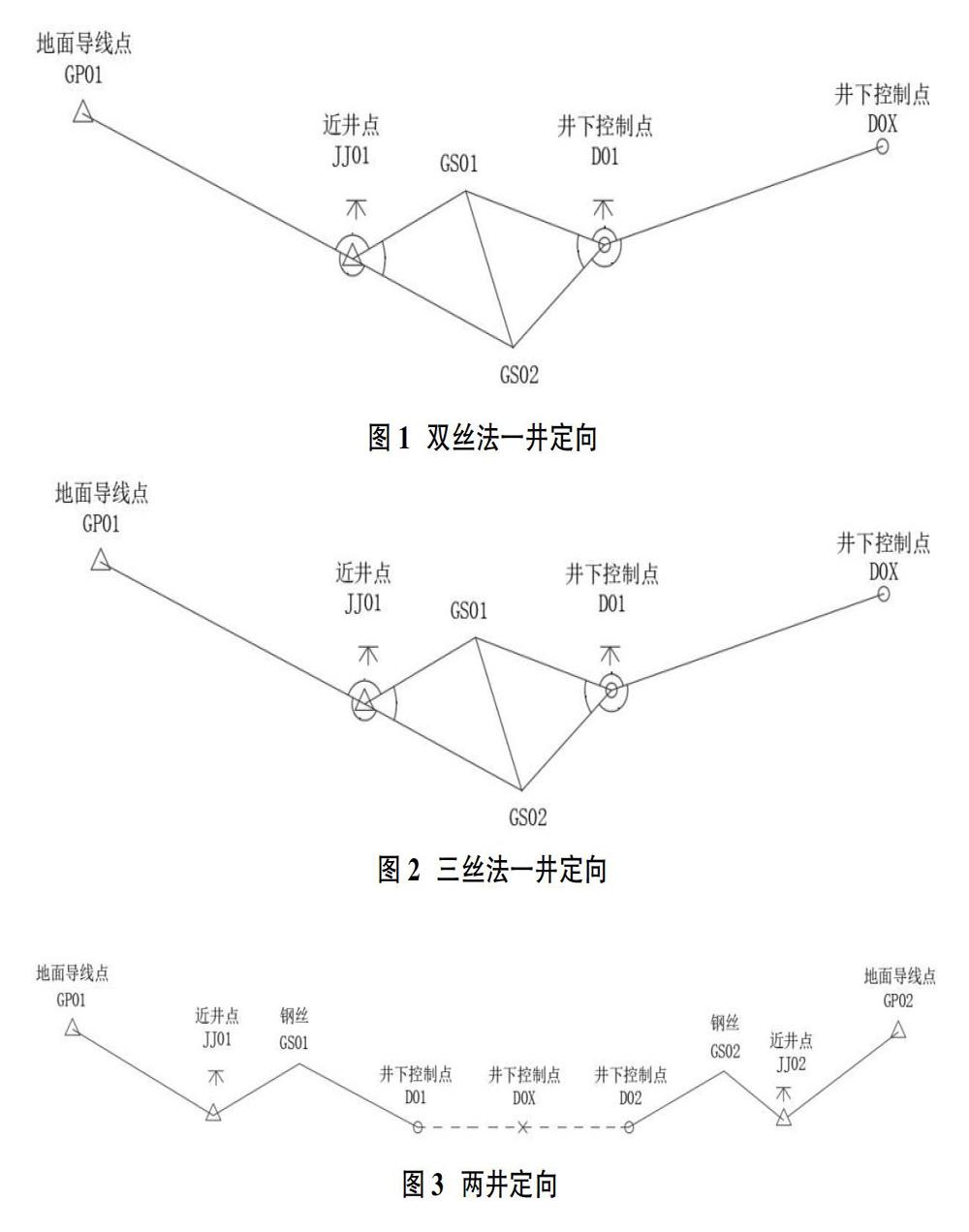
竖井联系测量的形式主要有一井定向和两井定向。一井定向主要是施工环境只有一个竖井的条件下通过双丝法或三丝法将近井点及井下控制点与钢丝之间形成单联系三角或双联系三角,从而进行坐标和方向的传递。两井定向通过两个竖井里悬吊的两根钢丝与钢丝之间的地下导线点形成的无定向导线传递坐标和方向。(图1-图3)
竖井联系测量施测时要求同时在近井点和井下控制点架设全站仪,用方向观测法观测地面后视导线点(GP01)与钢丝(GS01、GS02),及远竖井段的导线点(D0X)与钢丝(GS01、GS02)的角度距离。传统方法测量时通常采用人工读数、手簿记录的方式进行,需要人工外业手算检核,效率比较低。随着带自动马达全站仪的越来越普遍,在测量后视导线点棱镜时,可以采用ATR自动搜索技术自动追踪对准棱镜测量距离和角度,只需要粗瞄镜头即可,免去了人工瞄准,一定程度上也减少了照准误差。但是这种方法仍然需要现场手簿记录和人工外业检核计算,现场施测的数据同后期平差软件处理仍然无法连贯进行,还需要人工整合数据形成平差文件数据,不仅费时,中间环节还可能出差错。
3 联系测量自动化应用方法的介绍
基于测量机器人的导线自动施测在传统导线测量中应用较普遍,内置、外置的导线量测软件都已经很成熟。竖井联测测量不同于传统导线量测的地方在于竖井中传递作用的的钢丝不是传统的棱镜,而自动施测软件通过测量机器人无法追踪钢丝上的反光贴。由于没有联测反光贴的设计需求,当利用自动施测软件进行测量时,碰到反光贴因追踪不到目标无法记录数据发生宕机,有些软件设计则使用中无法更换目标镜头类型。经过长时间的反复试验各种仪器、软件,实践出一种基于TS60测量机器人及内置多测回测角测距软件的自动施测方法。该方法流程同传统导线量测方法相似,首先需要机器预先学习各观测目标,在学习钢丝反光贴时仪器会自动默认有棱镜模式自动搜索,自动化搜索失败后,TS60仪器可以手动切换目标镜头为反光片模式,测量并记录钢丝反光贴的角度距离。在学习地面后视点(GP01、GP02)或远竖井端导线点棱镜(D0X)时常规学习即可。学习完成,仪器会自动化施测,当仪器自动追踪钢丝反光片时,需要人为遮挡镜头避免追踪记录到其它目标镜头。待搜索停止后手动切换目标类型为反光片模式,人工瞄准反光片仪器测量并记录,仪器自动追踪下一个目标,依次进行。仪器施测棱镜目标时不需人工干预,测到反光片时人工提前遮挡切换人工读数记录即可。施测过程中不必人员现场检核计算,软件自动检测半测回归零差、一测回2C较差、方向值各测回较差等检核值,施测效率大大提高。施测完成后仪器导出的观测数据文件(SUC)可以通过平差软件直接处理计算,不需要人工整合数据。
该方法施测前需要认真校核仪器的軸系差和ATR,确保ATR锁定精度和人工瞄准相符。施测时各方向顺时针依次学习,保证仪器测量时上、下半测回可以一个方向转动减少转动隙差;在测量钢丝时务必确保始终测量一个反光片,传统施测时可以中途更换反光片目标手簿记录平距即可,而软件记录时会默认用一个目标点计算,如果中途更换反光片目标会导致观测的竖直角超限,影响距离计算;有些平差软件在处理软件记录的混合反光贴数据和棱镜数据的观测数据文件(SUC),无法正确算出导线点到反光贴的实际距离,经实际测试铁四院平差软件可以正确归算,铁二院平差软件计算时会出错,选用平差软件时应注意反光片平距归算是否正确,现场施测时可在常规测量模式下测量记录几个设站点到钢丝的平距供后期检核。
4 应用实例
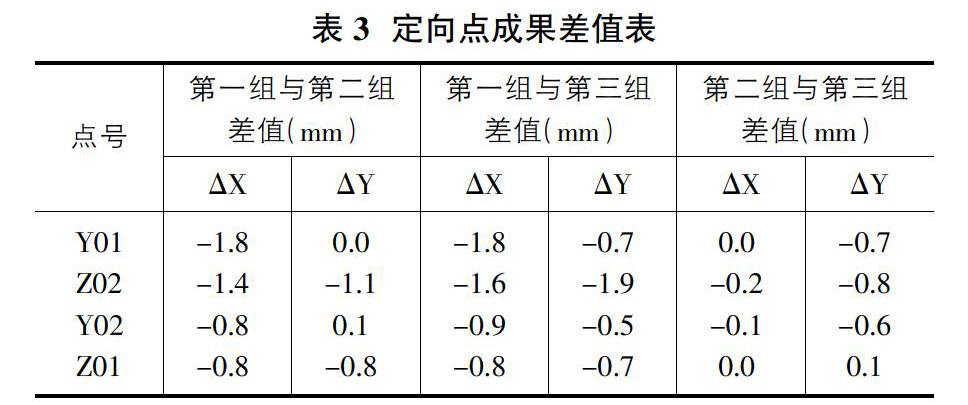
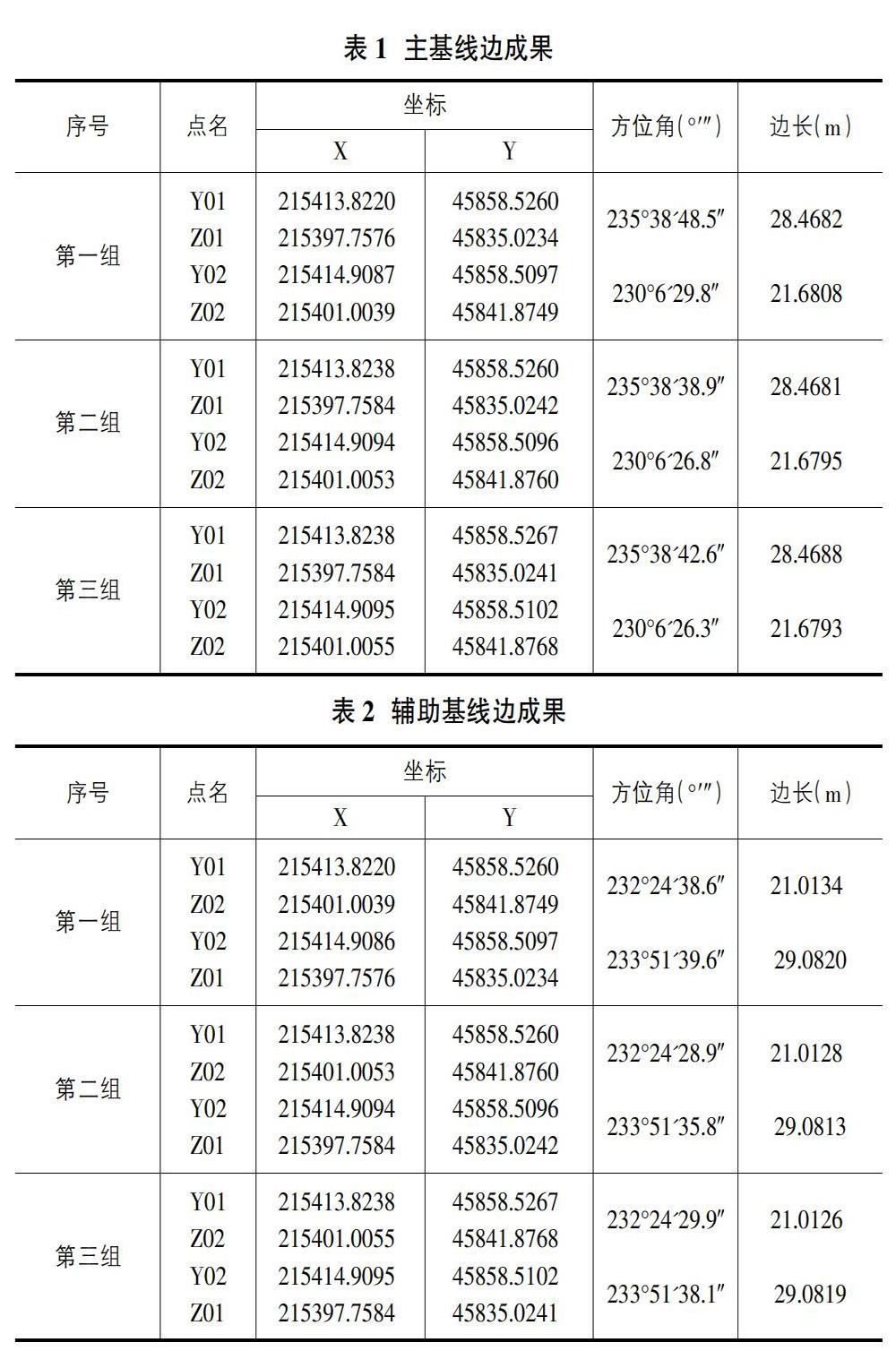
本次应用实例为广州地铁18号线的南村万博站~番南2#盾构井间的一个暗挖竖井联系测量,该暗挖竖井到大里程南村万博站为278m的矿山法暗挖段,小里程是至番南2#盾构井的2400m盾构区间段,本竖井井深40m左右。竖井的近井点与地面后视方向点均设置为强制对中装置,可以有效减小对中差。本次竖井联系测量采用双丝法施测,用0.3mm钢丝分别悬挂10kg重锤,置于竖井相对角位置,阻尼液采用的废机油。通过变换钢丝进行三次独立测量,每次变换钢丝施测4个测回数据,每次变换钢丝位置待钢丝稳定后,均对井上下钢丝进行对边观测,已检核井上下钢丝间距,确保满足钢丝间距较差小于1mm才进行施测。仪器设备采用角度精度0.5″距离精度0.6mm+1ppm的TS60,结合仪器内置多测回测角测距软件进行施测。本次所测成果数据如表1-表3。
本次实测成果表中主基线边定向边最大方位角差值9.6″,辅助基线边定向边最大方位角差值9.7″均小于规范要求的12″,各组定向点坐标分量差值最大为1.9mm满足施工精度要求。
5 结论
本文讨论的基于TS60测量机器人的自动化应用方法在广州地铁竖井项目中的实际应用表明,该方法能够满足规范施工精度要求。虽然在程序进行到钢丝时也需要人工去瞄准,但人工瞄准已经附属于自动化程序中,不需要人工记录,不需要人工计算检核。相比传统施测方法,能大大缩短现场联系测量施测时间,数据处理方面也不需要人工整合干预,简便高效。
参考文献:
[1]刘肇仁,李旺民.地铁隧道施工中平面联系测量方法实践与结果分析[J].城市勘察,2019(2).
[2]曹先革,贾思水,赵文更.一井定向在地铁隧道竖井联系测量中的应用[J].测绘与空间地理信息,2018(1).
[3]赵鹏飞,黄于保,陈功亮,雷婉南.超深竖井联系测量的分析与研究[J].城市勘察,2019(5).
[4]GBT 50308-2017,城市轨道交通工程测量规范[S].
