一种防水材料喷涂车控制系统研究
2020-05-25纪博林
纪博林


摘要:为实现在平面自动化喷涂,保证涂膜厚度均匀性、一致性,提高喷涂效率,研发了一种防水涂料喷涂车。喷涂车包括四组走行机构和转向系统,通过控制系统实现走行速度0-7.5m/min无极调速。根据走行速度实现喷涂厚度的设置,转向机构根据喷涂位置的变化进行0-180度转向,这样可以实现快速换向,提高喷涂效率。卷筒可以根据喷涂的环境进行收放电缆和喷涂液压管道,减少人工辅助作业,实现自动化作业。喷涂系统根据喷涂的工况进行设置喷涂宽度和喷涂往复运行速度,同时框架结构采用2A14铝合金,整车自重较轻,方便装车和运输。实际应用表明,喷涂车能够有效地保证喷涂质量,提高喷涂效率,节省喷涂涂料,减少对操作人员的人身伤害。
Abstract: In order to realize automatic spraying on the plane, ensure the uniformity and consistency of film thickness, and improve the spraying efficiency, a waterproof coating spraying car is developed. The spraying car consists of four groups of running mechanism and steering system, and the running speed is 0-7.5m/min stepless speed regulation through the control system. According to the travel speed to achieve the setting of spraying thickness, the steering mechanism according to the change of spraying position to turn 0-180 degrees, which can achieve fast reversing and improve spraying efficiency. The drum can retract and release the cable and spray the hydraulic pipeline according to the spraying environment, reduce the manual auxiliary operation and realize the automatic operation. The spraying system sets the spraying width and spraying reciprocating speed according to the spraying working conditions. Meanwhile, the frame structure adopts 2A14 aluminum alloy, the weight of the whole vehicle is light, which is convenient for loading and transportation. The practical application shows that the spraying car can effectively guarantee the spraying quality, improve the spraying efficiency, save the spraying coating and reduce the personal injury to the operators.
關键词:喷涂车;控制系统;走行机构;转向系统
0 引言
目前,防水涂料喷涂车在铁路、公路施工中已经成熟使用。现有技术中的防水涂料喷涂车,通过操作人员手动调整后端调整轮的方向,进行控制喷涂台车的喷涂直线度,并且喷涂的直线度和喷涂速度由操作人员的熟练程度决定,最不利的是操作防水涂料喷涂车需要操作人员需要一直跟随喷涂车进行喷涂,这样对操作人员伤害最大[1-3]。上述现有技术存在以下缺点:由于防水涂料喷涂车的走行直线度需要操作人员去手动控制,不能利用本身的自动控制系统进行控制直线度;喷涂速度慢,由于是操作人员控制喷涂速度,速度不能太快,这样操作人员很难控制喷涂质量和直线度;操作防水涂料喷涂车需要操作人员一直手动调节直线度,喷涂的防水涂料对操作人员身体有伤害。
1 喷涂车控制系统设计
1.1 设计目标
①在平面,坡度<15°能满足喷涂要求的基面上自动行走;②单次行走喷涂宽度约0-1.5m,往复喷涂运行速度最大为2m/s;③喷涂厚度可自由设定0.5-3.0mm;④行走速度根据设定速度而定,最大行走速度7.5m/min;⑤电动驱动;⑥人工遥控器操控,转弯及搭接宽度可人工操控。
1.2 参数计算
为实现自动喷涂,设计采用往复喷涂方式加匀速行走来控制涂膜均匀性,而涂膜厚度与喷涂机喷涂流量Q、小车行走速度V、往复宽度M、干膜密度ρ、固体含量X有关,其中流量、干膜密度、固体含量可视为定量输入,宽度设计最大为1.5m,所以涂膜厚度只与行走速度有关,往复喷涂速度最大为1m/s。
①往复行程设为1.5m,但由于在两端存在加速和减速会导致两端涂膜厚度增加,通过在两端给予一定角度的摆枪角度α来解决这个问题。
摆枪角度和行走速度与加减速的加速度有关系,行走速度为V和加速度为Δ,加减速段距离为s=V2/2Δ,例如,V=1m/s,Δ=5m/s2,这要求往复滑台的加速度要达到5m/s2,加速度越大加减速距离越短越有利保证涂膜均匀。
②喷涂厚度与行走速度关系。
假设在①中加速段距离为0.1m,最终喷涂宽度计算结果为1.7m,减速时间为,根据计算,偏转机构转动加速度为2.258π/s。
喷枪摆动距离与均匀性有关,而涂膜厚度与小车行走速度有关,根据上面计算摆动宽度1.5m,成膜宽度为1.614,输入变量涂膜厚度h、固含量X、干膜密度ρ、喷枪流量Q,喷涂过程满足如下公式:
这样可以根据要喷不同厚度的涂膜即输入不同厚度参数即可自动算出小车行走速度,因为流量、固含、干膜密度都会根据料和设备不同有不同变化,所以都要成为变量,但主要追求的是厚度所以厚度也为变量这样在操作机器时需输入Q、X、H、ρ,即可自动算出小车要自动控制的行走速度。
1.3 喷涂控制系统设计
①喷涂模式选择。
选择喷涂模式时,电磁阀接收信号开始喷涂,往复机往复运动,开枪坐标、关枪坐标可根据喷涂距离进行任意设定(0-2m),往返点缓冲可选关油或开油;适合连续传送的工件;往复次数可设定,喷涂启动信号可人为控制,喷完设定次数后可停止,等候下一信号,适合间断生产类型工件;每种模式开关枪位置可以单独控制;往复速度最高设置为1m/s。
②小车控制方案。
为保证小车的直线运动,小车行走系统可带转向,与参照物(拉线)保持一定的距离。小车的行走速度为0-7.5m/min,在此范围内速度可调,为使用方便,小车底盘加入回转系统。
③喷枪往复控制方案。
该往复运动采用单轴控制,硬件设备有伺服电机和PLC,一般的往复运动的控制过程为先加速再匀速最后减速,在加减速的过程中由于速度较慢,容易导致喷涂厚度不均,在这个过程中为保证喷涂的均匀,枪头可摆动,在加减速的过程中枪头要向内侧摆动。往复运动的速度为1m/s,根据实际的喷涂厚度,调节合适的速度及喷枪流量。
2 喷涂车关键技术
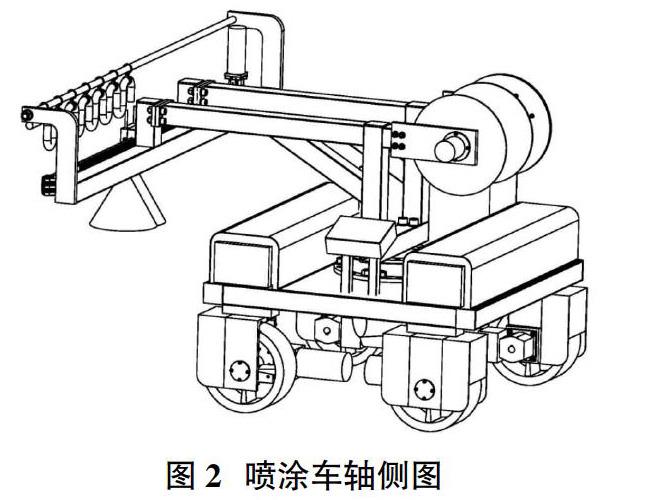
防水涂料喷涂车由车架、走行系统、转向系统及喷涂机构组成。采用内齿轮回转支撑(013.25.315),需要转向时,控制器控制转向电机减速机带动进行90度转向[4]。防水涂料喷涂车关键技术包括以下5个方面:
①喷涂机构采用伺服电机驱动控制实现往复运动速度范围宽,调速方便;
②喷涂机构的转向机构采用调速电机及减速机驱动喷涂机构转向,其转向范围为0-180°,为了保证转向的精度加设限位器进行控制;
③走形系统采用四个同等型号的变频电机及减速机驱动,并加设纠偏装置可以保证走形机构走形直线度,并且采用变频电机可以实现调速范围宽,调速灵敏;
④卷筒采用调速电机及减速机驱动,并根据走形系统的速度进行调速,实现电缆和涂料供给管路长短控制,减少喷涂人员的配置;
⑤控制系统采用全自动控制并加设无线装置,可以实现远距离操作,减轻对操作人员的伤害。
3 结论
喷涂车采用四台相同型号的调频电机和转向调速电机进行控制走形速度和直线度,在喷涂过程中,根据设置的喷涂界限进行喷涂,当发生偏离界限时,系统根据反馈的位置偏差进行修正走形速度,保证喷涂的直线度。再喷涂过程中,当喷涂距离超过放置的电缆和喷涂液压管时,卷筒进行转动,释放电缆和喷涂液压管,根据需要也可以收拢电缆和喷涂液压管。现场应用表明:喷涂车能够有效地保证喷涂质量,提高喷涂速度且实现自动化喷涂,保证涂膜厚度均匀性、一致性提高喷涂效率[5]。自动化涂车可作为同类工程施工提供相關参考,具有一定的推广意义。
参考文献:
[1]任骏锋.基于PLC和组态软件的非晶涂层喷涂装置控制系统的研究[D].北京化工大学,2016.
[2]郑元国,徐剑芸.基于PLC及步进电机控制的自动喷涂机[J].机械工程与自动化,2011(06):119-120.
[3]苏敏.新型下涂剂喷涂车的研制[J].工程机械,2006(10):11,26,82.
[4]严生贵,白书亚,沈承金.机械化电弧喷涂装置及应用[J].腐蚀与防护,2002(09):395-396.
[5]卢红旗.智能数码迷彩喷涂技术及装备研制[D].西安理工大学,2018.
