基于蚁群算法的无人机航迹规划研究
2020-05-25王辉胡晓阳
王辉 胡晓阳

摘 要:现如今,无人机应用的关键技术无外于乎航迹规划算法。基于这个现状,该文将针对无人机航迹规划进行系统研究,构建了无人机航迹规划的空间模型,在此之中结合蚁群算法,保证规划的真实可靠性。考虑到现在无人机应用的复杂以及不能完全利用有效空间的问题,提出以蚁群算法为基础的一种新型的航迹规划方法,并在其中考虑到地形,约束条件等外部因素,因此保证了航迹可以在现实中应用。最后,阐述了无人机航迹规划面临的关键问题及未来发展趋势。
关键词:无人机 蚁群算法 航迹规划
中图分类号:V249 文献标识码:A 文章编号:1672-3791(2020)04(a)-0029-02
Abstract: Nowadays, the key technology of UAV application is nothing more than the track planning algorithm. Based on this status, this paper will systematically study the UAV path planning, and construct a space model of UAV flight path planning. In this case, the ant colony algorithm is combined to ensure the true reliability of the planning. Considering the complexity of UAV applications and the inability to fully utilize the effective space, a new type of path planning method based on ant colony algorithm is proposed, and external factors such as terrain and constraints are taken into account. The track can be applied in reality. Finally, the key issues and future development trends of UAV flight path planning are expounded.
Key Words: UAV; Ant Colony Algorithm; Track planning
现如今,无人机多数作用于军事战争中的战场侦查、空中巡逻、威胁避障、监视目标以及精准打击等关键作用,因为诸多限制因素,一旦失败,可能会对战争整个局势造成不小的影响。由于无人机本身需要地面工作站进行预编程序进行飞行操作实现目标任务,因此航迹规划极为重要。
航迹规划是无人机自主飞行控制阶段需要进行的重要研究内容,处于人们研究的热点之一。航迹规划实现方式是在一定的约束条件下[1],满足无人机自身飞行高度、最大转弯角以及实战环境因素,由出发点到目标点的最优飞行航行路径。航迹规划的目的生成一条可控可飞的有效路线,引导无人机去完成既定目标任务,在飞行阶段,无人机可以接收到来自地面的任务指令。按照航迹规划实用性分,可分为离线航迹规划和在线航迹规划[2]。传统离线航迹规划由于更新慢、时效性差等原因已不能满足复杂度较高的战场环境,因此为提高无人机战场存活和及时精准打击,对在线实时航迹规划的深入研究尤为重要。
近年来,算法一直处于前沿领域研究,蚁群算法作为一种仿生算法,目前已经应用于各种不同的离散优化问题,这些方面的研究涵盖了路径规划,该文基于蚁群算法应用于无人机的航迹路径规划。蚁群算法具有良好的鲁棒性、抗干扰性以及全局计算能力而被应用于诸多的领域。
1 航迹规划威胁模型
在解决航迹规划问题时,首先根据已知的地形信息和敌方威胁构建数字地图。地形信息包括基础地貌以及特征地形,由于无人机在一定高度飞行,在该高度下的基础地貌不影响航迹规划,所以该文将基础地貌设定为平原,以山峰为代表的特征地形参与构建数字地图。
1.1 建立数字模型
公式如下:
将飞行区域的火力威胁等效成山峰加载到数字地图,采用模型如下:
将原始随机地形和山峰等效融合从成飞行区域中的数字地形图,融合算法如下:
水平坐标点的地形高度为别为Z1(X,Y)和Z2(X,Y),山峰的个数记为n,第i威胁的高度记为zi,xoi、yoi为山峰最高点的横纵坐标,xsi、ysi山峰坡度量。
1.2 建立最小威胁曲面
将火力威胁等效成为山峰威胁,数字地图逐渐升高伴随着威胁加深,因此威胁曲面是地形高程升高hc所構成的曲面。无人机在该曲面飞行所受威胁可以达到最小,所以无人机的飞行航迹必须在这个曲面上。最小威胁曲面为:
1.3 到达目标约束
同时到达目标是许多无人机航迹规划需要解决的主要问题。当多架无人机飞行抵达敌方上空时,敌方防空火力在短时间内无法立即发现全部并将其一一摧毁,因此,未被摧毁的无人机可以对其进行实时目标打击,从而增加了目标摧毁概率。
1.4 航迹代价函数
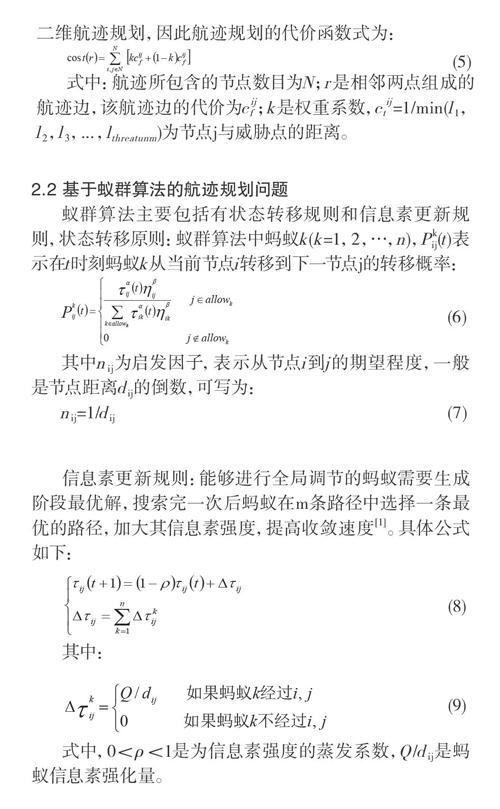
将最小威胁曲面进行投影,三维航迹规划可以简化成二维航迹规划,因此航迹规划的代价函数式为:
式中:航迹所包含的节点数目为N;r是相邻两点组成的航迹边,该航迹边的代价为cfij;k是权重系数,ctij=1/min(l1,l2,l3,...,lthreatunm)为节点j与威胁点的距离。
2 基于蚁群算法的航迹规划
2.1 算法原理
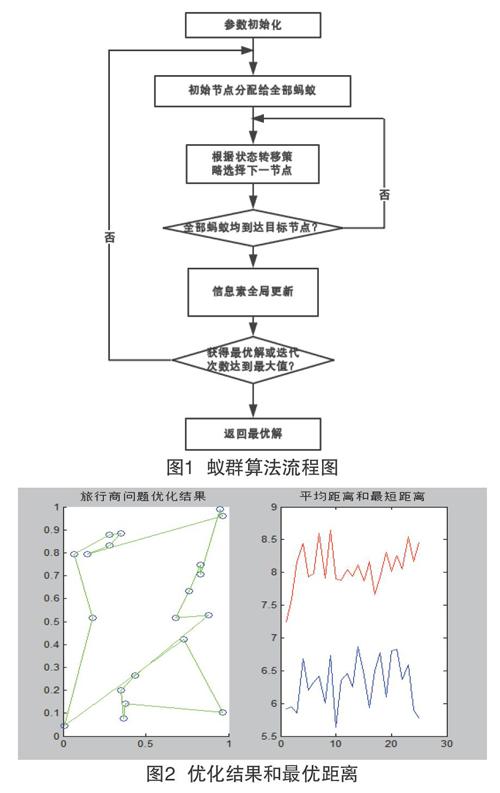
蚁群算法原理[3]是蚂蚁由于个体之间存在信息共享功能,能够在没有任何可见性条件下找到食物后沿原路返回到蚁穴,随着环境变化蚂蚁对所走过的地方释放信息激素,蚂蚁走过的路径越短,释放的信息激素浓度就会越高,其他蚂蚁选择路径时对该路径选择的概率就越大,从而实现从蚁穴到食物的最短路径,随着环境变化,信息素浓度变化,动态更新所有的路径选择。算法的流程图如图1所示。
2.2 基于蚁群算法的航迹规划问题
蚁群算法主要包括有状态转移规则和信息素更新规则,状态转移原则:蚁群算法中蚂蚁k(k=1,2,…,n),Pkij(t)表示在t时刻蚂蚁k从当前节点i转移到下一节点j的转移概率:
其中nij为启发因子,表示从节点i到j的期望程度,一般是节点距离dij的倒数,可写为:
信息素更新规则:能够进行全局调节的蚂蚁需要生成阶段最优解,搜索完一次后蚂蚁在m条路径中选择一条最优的路径,加大其信息素强度,提高收敛速度[1]。具体公式如下:
其中:
式中,0<ρ<1是为信息素强度的蒸发系数,Q/dij是蚂蚁信息素强化量。
3 实验仿真
通过MATLAB软件仿真,给定蚂蚁为20×2随机矩阵,蚂蚁个数为20,迭代次数为100,信息素重要程度的参数为0.7,启发式因子重要程度的参数为1.5,信息素蒸发系数为3,信息素增加强度系数为2.7。
(1)蚁群算法[5]涉及的参数需要提前设定。
(2)如果这一次迭代的次数值小于NC_max,進入第六步,佛则进入下一步。
(3)将其中一个城市定为Ni,命令其中一只蚂蚁从Ni开始游历所有的城市,当然,蚂蚁会在游历过的城市留下信息激素,当这只蚂蚁游历完以后,再让另外一只蚂蚁进行游历,同样,该蚂蚁也会在路上留下信息激素,同样的过程,命令所有蚂蚁都对所有城市进行一次游历,接着进入下一步。
(4)当蚂蚁对所有城市都进行游历一遍,如果起点的城市没有出现的话,跳回上一步,当作为起点的所有城市都游历完毕,进入下一步。
(5)得到游历的路径值,且获取新的信息激素值,迭代次数累计起来,返回第二步。
(6)得到预期的结果,中止执行算法。
4 结语
传统的蚁群算法采用全局搜索方式,已经走过的节点除外,将其他相邻的节点还会走一遍,该搜索方式的时间过大并且容易陷入局部最优,有时候还不能避开所谓的危险区,规划出来的航迹不符合实际可飞条件。该文改进算法减少搜索临近所有节点的次数,减少计算时间,可以得到航迹代价较小的无人机航迹。
参考文献
[1] 丁明跃,郑昌文,周成平,等.无人飞行器航迹规划[M].北京:电子工业出版社,2009:1-2.
[2] 胡中华,赵敏.无人飞行器在线航迹规划技术研究[J].航天电子对抗,2010,26(4):11-15.
[3] 胡中华,赵敏,刘世豪,等.基于自适应蚁群算法的无人飞行器航迹规划[J].计算机集成制造系统,2012,18(3):560-565.
[4] 孙勇,李妮,龚光红,等.基于知识库的动态蚁群算法[J].北京工业大学学报,2012,38(3):374-379.
