刚柔协作3CD/2RPU-SPR搅拌摩擦焊机器人研究
2020-05-25张俊宝侯红娟孙丁丁解磊磊
张俊宝,侯红娟,刘 健,孙丁丁,解磊磊
(1.河北工程大学机械与装备工程学院,河北邯郸056038;2.复旦大学工程与应用技术研究院,上海200433)
搅拌摩擦焊(friction stir welding,FSW)是一种具有焊接柔性好、焊接稳定、焊接质量高、自动化程度高、方便实用等优点的焊接方式,广泛应用于汽车制造、军工制造、精密器件制造等行业[1-2]。由于并联机器人具有刚度大、承载能力强、焊接稳定的优点,它正逐步取代串联机器人成为实现搅拌摩擦焊技术的主要工具,但并联机器人因自身条件限制,存在灵活性较低等缺点,限制了搅拌摩擦焊技术的发展。为使并联机器人更加适用于搅拌摩擦焊技术,燕山大学的邹成设计了基于2UPR-RPS并联机构的搅拌摩擦焊机器人,并对该机构进行了运动学性能分析[3];浙江理工大学的张宁斌等把2-SPR-RPS并联机构用于搅拌摩擦焊机器人,进行了机构静力学分析,得到了其完整的静力学图谱[4];上海交通大学的Shi 等将3-PRS机构用作搅拌摩擦焊机器人的主进给机构,并对它进行了运动学分析[5];同济大学的陈淼等提出将2UPRRRU 机构用于焊接装备,基于粒子群算法找到了驱动输入的精确解,并找到了驱动奇异的条件[6]。为解决搅拌摩擦焊机器人在顶锻力承受以及焊接灵活性方面存在的不足,笔者在三自由度2RPU-SPR搅拌摩擦焊机器人基础上增加3根绳索,设计了一种刚柔协作3CD/2RPU-SPR搅拌摩擦焊机器人,对该机器人进行运动学分析,求得无量刚速度雅克比矩阵,进而计算该机器人的各项运动性能指标,并对比2RPUSPR、3CD/2RPU-SPR搅拌摩擦焊机器人的运动学性能,最后根据性能指标对3CD/2RPU-SPR搅拌摩擦焊机器人进行结构参数优化。
1 刚柔协作3CD/2RPU-SPR 搅拌摩擦焊机器人运动学分析
1.1 3CD/2RPU-SPR搅拌摩擦焊机器人建模
3CD/2RPU-SPR搅拌摩擦焊机器人由并联刚性部分和并联绳索部分构成,刚性部分定平台、绳索部分定平台、动平台与支链的3个铰点均呈等腰直角三角形分布,其三维模型如图1(a)所示。如图1(b)所示,刚性部分定平台的坐标系B-xyz坐标原点位于△B1B2B3斜边中点,动平台的动坐标系A-uvw坐标原点位于△A1A2A3斜边中点,绳索部分定平台的坐标系C-x'y'z'坐标原点位于△C1C2C3斜边中点。搅拌摩擦焊搅拌头设置在动平台坐标原点A,将点A作为参考点。
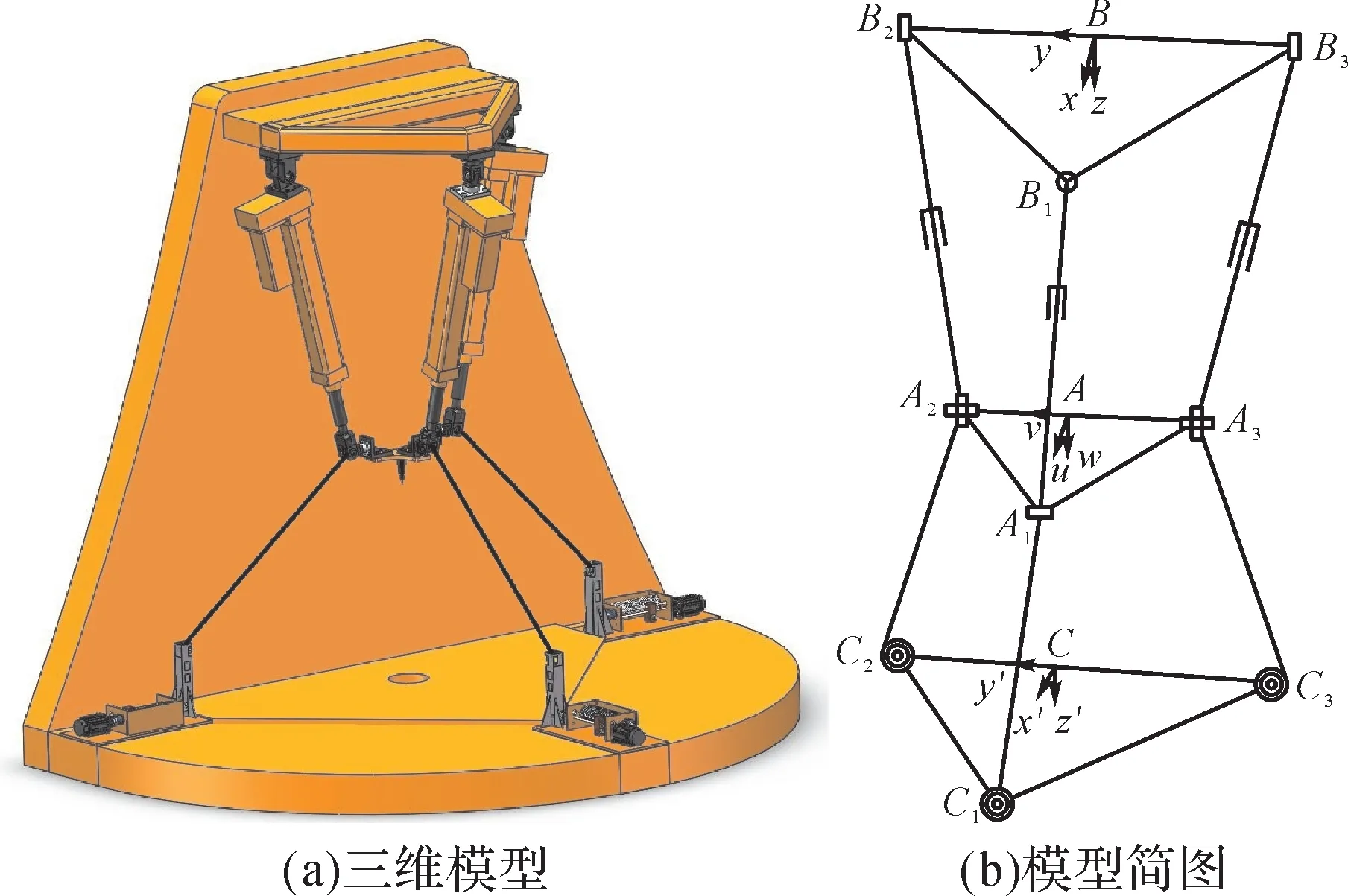
图1 3CD/2RPU-SPR搅拌摩擦焊机器人模型Fig.1 Model of 3CD/2RPU-SPR friction stir welding robot
1.2 刚性部分位置逆解
设△B1B2B3和△A1A2A3外接圆的半径分别为b和a,则点Ai(i=1,2,3)在动坐标系A-uvw下的位置矢量为:

点Bi在定坐标系B-xyz下的位置矢量为:

设点A在定坐标系B-xyz下的位置矢量rA=[xA yA zA]T,动坐标系A-uvw相对于定坐标系B-xyz的旋转变换可通过z-x-y欧拉角进行描述:动坐标系先绕w轴旋转0 rad,再绕生成的u′轴旋转α,再绕生成的v″轴旋转β,则旋转矩阵BRA为:

式中:s表示sin,c表示cos。
由式(1)和式(3)可得Ai在定坐标系B-xyz下的位置矢量为:

基于封闭矢量法,建立机器人刚性部分的位置矢量方程:

式中:Li=lili,其中li为刚性部分支链的长度,li为支链的方向单位向量。
则机器人刚性部分的位置逆解为:

1.3 绳索部分位置逆解
△C1C2C3外接圆的半径为c,点Ci在坐标系Cx'y'z'下的位置矢量为:

点A在坐标系C-x'y'z'下的位置矢量为:

基于封闭矢量法,建立机器人绳索部分的矢量方程:

式中:Hi=hihi,其中hi为绳索的长度,hi为绳索的方向单位向量。
则机器人绳索部分的位置逆解为:

1.4 基于求导法的速度雅克比矩阵求解
1.4.1 刚性部分速度雅克比矩阵求解
对式(5)进行求导得:

式中:w为动平台角速度矢量;v为点A的线速度矢量;wli为刚性部分支链的角速度矢量;l˙i为刚性部分支链移动副的移动速度。
由于lTi(wli×li) =0,对式(13)两端点乘lTi可得:

将式(14)写成矩阵形式,则:

令gl、sl、jl分别为Jll第3、第4、第5 列的列元素组成的集合,则:

1.4.2 绳索部分速度雅克比矩阵求解
对式(10)进行求导得:

式中:whi为绳索的角速度矢量;h˙i为绳索的拉伸速度。
由 于hTi(whi×hi) =0,对 式(18)两 端 点 乘hTi可得:

将式(19)写成矩阵形式,则:


令gh、sh、jh分别为Jh1第3、第4、第5列的列元素组成的集合,则:

Jh=Jh2TT,T为三阶单位矩阵。
3CD/2SPR-RPU 搅拌摩擦焊机器人简化后速度雅克比矩阵为:

1.5 基于特征长度法的无量纲速度雅克比矩阵构造
由以上分析可知:

式(24)左右两边乘以特征长度Q[7-8],可得:

式中:J为无量纲速度雅克比矩阵。
由此可得:

式中:I1×1、I2×2为单位矩阵;01×2、02×1为零矩阵。
由机器人机构各向同性[9]得:

式中:I6为6×6的单位矩阵;σ为不等于0的常数。
将J分块后代入式(27),可得:

联立式(27)和(28)可得:

对式(30)分别求迹,则可得特征长度Q为:

将Q代入式(26),即可得3CD/2RPU-SPR 搅拌摩擦焊机器人的无量纲速度雅克比矩阵。
2 搅拌摩擦焊机器人性能分析
利用MATLAB软件对2RPU-SPR搅拌摩擦焊机器人与3CD/2RPU-SPR搅拌摩擦焊机器人的工作空间、承载力、灵巧性、全域灵巧性、考虑灵巧性的工作空间、刚度、全域刚度、考虑刚度的工作空间及优质工作空间等性能指标进行求解分析与比较。
2.1 工作空间
3CD/2RPU-SPR搅拌摩擦焊机器人结构参数如表1 所示,其工作空间[10-13]受杆长和运动副转角的约束。

表1 3CD/2RPU-SPR搅拌摩擦焊机器人结构参数Table 1 Structural parameters of 3CD/2RPU-SPR friction stir welding robot
以搅拌摩擦焊搅拌头放置点A为参考点,设定其搜索范围为-400≤x≤400 mm,-400≤y≤400 mm,700≤z≤1200 mm,当搜索点数为2×106个时,3CD/2RPU-SPR 搅拌摩擦焊机器人工作空间的可行点数为57 225个,其工作空间如图2所示。

图2 3CD/2RPU-SPR搅拌摩擦焊机器人工作空间Fig.2 Workspace of 3CD/ 2RPU-SPR friction stir welding robot
由图2可看出,3CD/2RPU-SPR搅拌摩擦焊机器人的工作空间关于y轴对称,与其运动特点一致,说明所设计的3CD/2RPU-SPR搅拌摩擦焊机器人的焊接运动具有连续性。
2.2 承载力
搅拌摩擦焊机器人的承载力与力雅克比矩阵的最大和最小奇异值有关[13],机器人承载力越大,说明其工作负载能力越强。机器人的承载力是指在‖f‖=1时,F的极值大小。
式中:f为驱动力矢量;F为点A所受外力;G为力雅可比矩阵;λ(GTG)为矩阵GTG的特征值;δ(G)为力雅克比矩阵G的奇异值。
力雅克比矩阵与速度雅克比矩阵的转化关系为:

通过计算可知在不同高度下2RPU-SPR 搅拌摩擦焊机器人和3CD/2RPU-SPR搅拌摩擦焊机器人的承载力如图3和图4所示。

图3 不同高度下2种搅拌摩擦焊机器人最大承载力对比Fig.3 Comparison of maximum bearing capacity of two friction stir welding robots under different heights

图4 不同高度下2种搅拌摩擦焊机器人最小承载力对比Fig.4 Comparison of minimum bearing capacity of two friction stir welding robots under different heights
从图3可以看出:在一定范围内,随着高度增加,2种机器人的最大承载力均不断增大;对2RPU-SPR搅拌摩擦焊机器人添加绳索,在不同高度下,其最大承载力均得到大幅度提升;不同高度下,当A点处于α∈( -0.2,0.2 )rad,β∈(0,0.4) rad 位置时,通过增加绳索,该位置处的承载力显著加大。从图4 可以看出:在一定范围内,随着高度增加,2种机器人的最小承载力均不断减小;对2RPU-SPR搅拌摩擦焊机器人添加绳索,在不同高度下,其最小承载力均得到大幅度提升。
通过机器人最大承载力和最小承载力图谱可以看出,添加绳索能显著提高机器人的承载力,说明3CD/2RPU-SPR搅拌摩擦焊机器人能够承受更大的载荷。
2.3 灵巧性
搅拌摩擦焊机器人的灵巧性对其轨迹规划、控制和焊接运动灵活性有重要意义,用速度雅克比矩阵条件数的倒数作为灵巧性的度量[14-16],可表示为:

式中:k(J)为速度雅克比矩阵条件数。
当条件数的倒数值越接近1时,机器人的运动传递性能越佳。不同高度下,2RPU-SPR搅拌摩擦焊机器人和3CD/2RPU-SPR搅拌摩擦焊机器人的速度雅克比矩阵条件数如图5 所示。由图可以看出,3CD/2RPU-SPR 搅拌摩擦焊机器人的速度雅克比矩阵条件数较小。

图5 不同高度下2种搅拌摩擦焊机器人速度雅克比矩阵条件数对比Fig.5 Comparison of speed Jacobian matrix condition numbers of two friction stir welding robots under different heights
不同高度下2RPU-SPR 搅拌摩擦焊机器人和3CD/2RPU-SPR 搅拌摩擦焊机器人的灵巧度如图6所示。由图可知,添加绳索后,不同高度下搅拌摩擦焊机器人的灵巧性有所提升,即3CD/2RPU-SPR 搅拌摩擦焊机器人焊接时运动更加灵活。

图6 不同高度下2种搅拌摩擦焊机器人灵巧度对比Fig.6 Comparison of dexterity of two friction stir welding robots under different heights
2.4 全域灵巧性及考虑灵巧性的工作空间
搅拌摩擦焊机器人的全域灵巧性[17]可用全域灵巧度表示为:

式中:W为工作空间。
工作空间内灵巧度大于GCI的点的集合为考虑灵巧性的工作空间。
由计算知2RPU-SPR 搅拌摩擦焊机器人的全域灵巧度GCI1=0.408 7,3CD/2RPU-SPR搅拌摩擦焊机器人的全域灵巧度GCI2=0.412 5,说明添加绳索后,机器人的灵巧性明显增强。在搜索点数为2×106个条件下,3CD/2RPU-SPR搅拌摩擦焊机器人考虑灵巧性的工作空间的可行点数为14 612 个,其工作空间如图7所示。

图7 3CD/2RPU-SPR 搅拌摩擦焊机器人考虑灵巧性的工作空间Fig.7 Workspace of 3CD/2RPU-SPR friction stir welding robot considering dexterity
当3CD/2RPU-SPR 搅拌摩擦焊机器人在图7 所示区域内进行焊接运动时,具有较大灵活性。
2.5 刚 度
刚度是指焊接机器人抵抗顶锻力引起的变形的能力,可以通过刚度矩阵来表征:

式中:KJ=diag[q1,q2,…,qn],qn为第n个驱动副的关节刚度。
以刚度矩阵对角线元素之和LSI作为机构的刚度评价指标,LSI值越大,说明机器人焊接时抵抗变形的能力越强,焊接精度越高。设机器人刚性部分刚度Gl=830 N/mm,绳索刚度Gh=100 N/mm,则不同高度下2RPU-SPR 搅拌摩擦焊机器人和3CD/2RPUSPR搅拌摩擦焊机器人的刚度如图8所示。

图8 不同高度下2种搅拌摩擦焊机器人刚度对比Fig.8 Comparison of stiffness of two friction stir welding robots under different heights
由图8可以看出,添加绳索后,不同高度下搅拌摩擦焊机器人的刚度均有较大提升,抵抗顶锻力引起的变形的能力更强。
2.6 全域刚度及考虑刚度的工作空间
搅拌摩擦焊机器人的全域刚度[18]可表示为:
工作空间内刚度大于GSI的点的集合为考虑刚度的工作空间。
由计算知2RPU-SPR 搅拌摩擦焊机器人的全域刚度GSI1=4 544.3,3CD/2RPU-SPR 搅拌摩擦焊机器人的全域刚度GSI2=4 905.9,由此可知添加绳索后,机器人的刚度显著提升。在搜索点数为2×106个条件下,3CD/2RPU-SPR搅拌摩擦焊机器人考虑刚度的工作空间的可行点数为35 618个,其工作空间如图9所示。
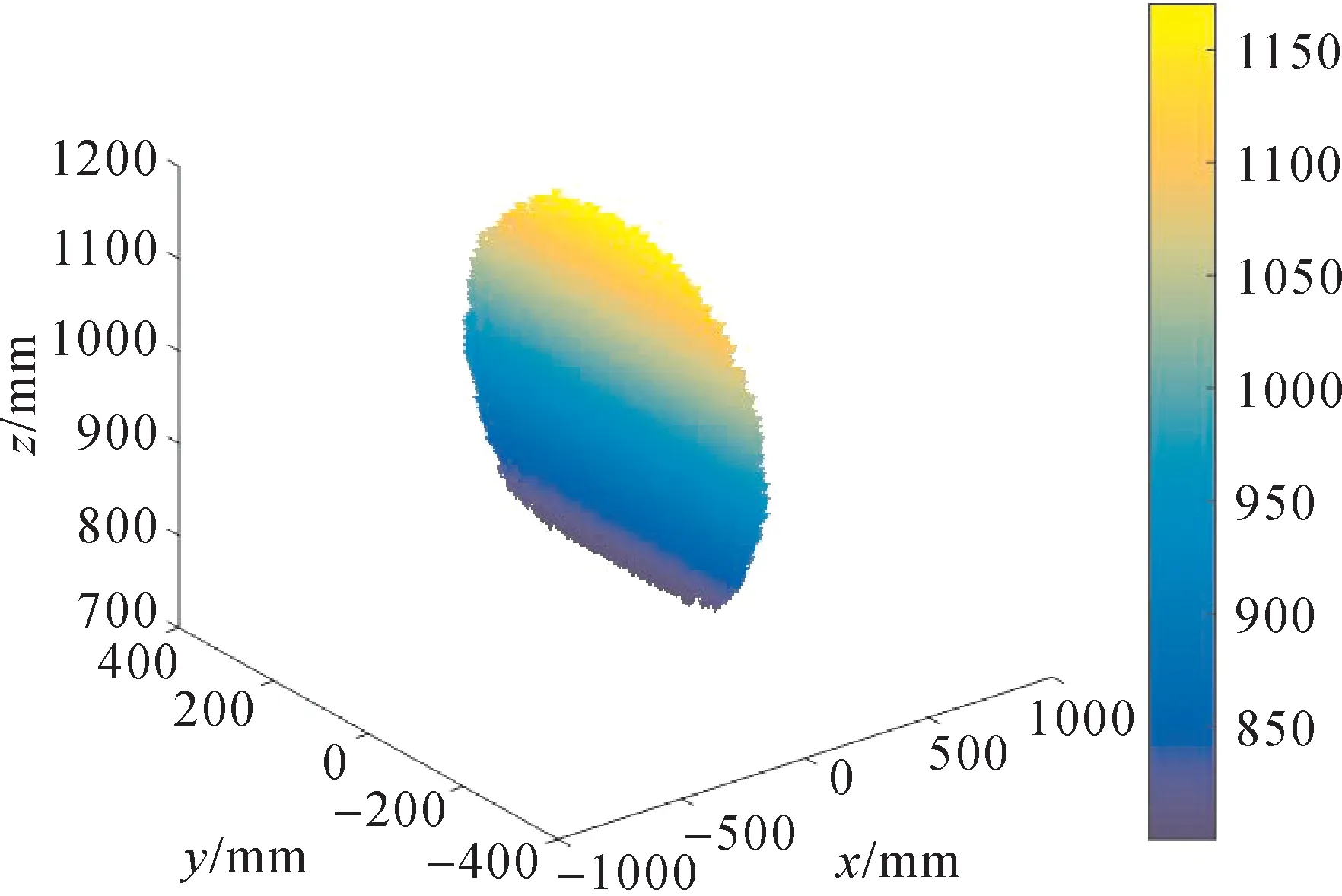
图9 3CD/2RPU-SPR 搅拌摩擦焊机器人考虑刚度的工作空间Fig.9 Workspace of 3CD/2RPU-SPR friction stir welding robot considering stiffness
当3CD/2RPU-SPR 搅拌摩擦焊机器人在图9 所示区域内进行焊接运动时,其刚度较大,焊接性能较好。
2.7 考虑灵巧性和刚度的优质工作空间
工作空间内所有灵巧度大于GCI、刚度大于GSI的点的集合为该机器人的优质工作空间。
通过编程可得,在搜索点数为2×106个条件下,3CD/2RPU-SPR搅拌摩擦焊机器人考虑灵巧性和刚度的优质工作空间的可行点数为1 921个,其优质工作空间如图10所示。在此空间内工作,机器人能承受较大顶锻力,焊接灵活性也较好。

图10 3CD/2RPU-SPR 搅拌摩擦焊机器人考虑灵巧性和刚度的优质工作空间Fig.10 High-quality workspace of 3CD/2RPU-SPR friction stir welding robot considering dexterity and stiffness
3 3CD/2RPU-SPR 搅拌摩擦焊机器人运动性能优化
机器人各项运动性能取决于其结构参数,基于遗传算法[19-20]对3CD/2RPU-SPR 搅拌摩擦焊机器人进行多目标优化,以使该机器人更适用于搅拌摩擦焊接工作。
建立多目标模型如下:

以全域灵巧性指标f1(X)和全域刚度指标f2(X)最大为优化目标,取最优个体系数为0.1,种群数目为100个,遗传进化次数为50次,对机器人结构参数进行优化,结果如表2所示。
综合考虑焊接机器人工作时能够达到的工作空间、承载力、灵巧性和刚度等条件,取优化后第9组结构参数,优化前后3CD/2RPU-SPR 搅拌摩擦焊机器人运动性能对比如表3所示。

表2 3CD/2RPU-SPR 搅拌摩擦焊机器人结构参数优化结果Table 2 Optimization results of structure parameters of 3CD/2RPU-SPR friction stir welding robot

表3 优化前后3CD/2RPU-SPR 搅拌摩擦焊机器人运动性能对比Table 3 Comparison of motion performance of 3CD/2RPU-SPR friction stir welding robot before and after optimization
由表3 优化结果可以看出优化后3CD/2RPUSPR搅拌摩擦焊机器人的全域灵巧度和全域刚度均有所提高,优化后机器人各结构参数更能满足搅拌摩擦焊接工况。
4 结 论
搅拌摩擦焊技术广泛应用于制造业,但是搅拌摩擦焊机器人存在难以承受较大顶锻力以及焊接时灵活性较差等缺点,对此,将绳索与原有搅拌摩擦焊机器人结合,设计了一种刚柔协作3CD/2RPU-SPR搅拌摩擦焊机器人,并作了如下工作:
1)对3CD/2RPU-SPR搅拌摩擦焊机器人进行了运动学建模,运用封闭矢量法计算其刚性部分和绳索部分的位置逆解,运用求导法求得其速度雅克比矩阵,进而利用特征长度法求出了搅拌摩擦焊机器人无量纲速度雅克比矩阵。
2)以无量纲速度雅克比矩阵为基础,利用MATLAB软件对添加绳索前后的搅拌摩擦焊机器人的运动学性能进行分析对比,得出3CD/2RPU-SPR 搅拌摩擦焊机器人的承载力、灵巧性、全域灵巧性、刚度及全域刚度等性能相对于2RPU-SPR搅拌摩擦焊机器人均有所提升,3CD/2RPU-SPR搅拌摩擦焊机器人的工作空间、考虑灵巧性的工作空间、考虑刚度的工作空间及优质工作空间均左右对称,边缘过渡平缓,内部没有空洞。综合各项性能指标可知3CD/2RPUSPR搅拌摩擦焊机器人能够承受更大的顶锻力,运动灵活性较好。
3)对3CD/2RPU-SPR搅拌摩擦焊机器人进行了结构优化,结果表明当机器人刚性部分定平台外接圆半径为389.0 mm、绳索部分定平台外接圆半径为638.9 mm、动平台外接圆半径为208.2 mm、刚性部分定平台与绳索部分定平台间距为1 373.4 mm、驱动电缸最小长度为850.9 mm、电缸最大与最小长度比为1.6时,该机器人性能最佳,其各项性能均有所提升,更适用于搅拌摩擦焊接工作。
