永磁同步电机常见故障建模与仿真研究
2020-05-25王小强苏建徽
王小强,苏建徽
(合肥工业大学 电气与自动化工程学院,合肥 230009)
0 引 言
永磁同步电机(以下简称PMSM)运行可靠、控制灵活、效率高惯性低、输出转矩高,结构也简单,在电动汽车、航天等领域应用广泛。
近年来,出现了电机模拟器[1]的概念,专门用于模拟电机及其负载特性,它能够模拟与电机相同的端口电气特性,等效电机驱动器功率负载。其中,为测试电机驱动器在故障状态下的性能指标,需要获得能够模拟出PMSM常见故障的电机模型。
PMSM的数学模型在三种坐标系下各有优缺点。自然(a,b,c)坐标系下的模型适用性广泛;而同步旋转(d,q)坐标系下的模型完成了解耦,从而较自然坐标系下的模型容易不少[2];静止(α,β)坐标系下,电机模型也实现了一定程度的解耦,且变换过程不需要坐标变换角,这在实际运用中也能节省一些DSP资源[1]。本文将分别在三种坐标系下进行了PMSM故障数学模型的推导及对比研究,以适应不同场合应用。
研究PMSM故障一般的模拟方法主要有两种[3]:一种是用有限元分析法(FEA)建立故障模型,另一种则是在PMSM数学模型基础上借助MATLAB/Simulink仿真平台研究。文献[4]对三相对称短路稳态特性进行了数学理论推导,通过二维有限元法和实验分析了永磁磁链、极对数、直流电感等电机本体参数对三相短路特性的交叉影响,但尚未从第二种方法来研究三相对称短路故障。PMSM定子匝间短路故障也可以采用有限元分析法建立模型,但通过采用有限元建模对PMSM故障进行仿真,虽然精度高,但效率太低,计算速度慢,难以施加控制策略和工况[4]。为克服上述缺陷,采用集中参数的数学模型在MATLAB/Simulink上仿真是一种有效的方法。在对自然(a,b,c)坐标系下定子匝间短路故障建模时:文献[5]对内置式PMSM进行了建模分析,由于表贴式PMSM电感较内置式PMSM简单,其模型可以进一步简化;文献[4]研究表贴式PMSM,寻求将模型建得十分精确,在计算电机电感时引入泄露因子δbf而使得模型变得较为复杂,需要进一步改进。在对同步旋转(d,q)坐标系下定子匝间短路故障建模时:文献[6]研究了五相PMSM,三相PMSM需进一步推导;文献[7]在对三相PMSM数学模型推导时未包含故障特征变量-短路电流if;文献[7]在计算if时需同时获得正常电机和故障电机的三相电压,使得电机模块翻倍而变得庞杂,需要进一步改进。文献[8]对自然(a,b,c)坐标系下三相PMSM开路故障进行了数学建模,但未进行有限元或者Simulink建模仿真以验证模型的正确性。在静止(α,β)坐标系下对PMSM的匝间短路故障和开路故障的数学模型研究较少,还需要进行进一步的理论推导。
为弥补上述研究的不足,本文重新推导了在自然坐标系、旋转坐标系和静止坐标系下三种故障状态下PMSM的数学模型,并在MATLAB/Simulink环境下进行了建模和对比仿真研究。
1 PMSM数学模型
三相PMSM由三相绕组及铁心构成,电枢绕组常以Y型连接,在转子结构上,PMSM用永磁体取代电励磁,省去了励磁线圈、滑环和电枢。
为便于分析,作以下假设:
(1) 忽略电机铁心的饱和影响;
(2) 永磁材料的电导率为零;
(3) 电机的电流为对称的三相正弦波电流;
(4) 不计电机的涡流和磁滞损耗。
在自然(a,b,c)坐标系下PMSM定子电压方程:
(1)
电磁转矩方程[9]:
(2)
式中:Uabc,Rabc,Iabc分别为三相绕组的相电压、相电阻和相电流;ψabc为三相绕组的磁链;Te为电磁转矩,p为极对数。在下面矩阵变量中,Ra=Rb=Rc=Rs为定子绕组电阻,ψf为永磁体磁链的值,L为电机自感,M为电机互感。
利用经典Park变换,可得在同步旋转(d,q)坐标系下的数学模型,定子电压方程:
(3)
电磁转矩方程:
(4)
式中:ud,uq为定子电压;R为定子绕组电阻;id,iq为定子电流;p表示微分算子;Ld,Lq为d,q轴等效电感;Te为电磁转矩;p为极对数;ψf为永磁体磁链。
利用Clarke变换,可得PMSM静止(α,β)坐标系下定子电压方程如下:
[(Ld-Lq)(ωeid-piq)+ωeψf]·
(5)
电磁转矩方程:
(6)
其中磁链方程:
式中:Uα,Uβ分别是PMSM在静止坐标系下定子电压;iα,iβ为定子电流;p表示微分算子;Rs为定子绕组电阻;Te为电磁转矩;p为极对数;ωe为电角速度;ψα,ψβ为永磁体磁链。
另外,PMSM运动方程:
(7)
转速、机械角速度、电角速度、角度公式:
(8)
ωe=pωm
(9)
(10)
式中:n为电机转速;ωm为电机的机械角速度;TL为负载转矩;ωe为电角速度;θ为转子位置角;J为转动惯量;B为阻尼系数。
2 PMSM三相短路故障下建模仿真
2.1 三相短路下数学模型
当PMSM莫明地发生三相对称短路时,产生的暂态冲击电流可能导致转轴与绕组端部的严重机械应力损伤,还有永磁体的不可逆去磁。但三相短路也可主动作为保护动作来应用,比如运行过程中其它故障原因导致电机失控,可以主动采取三相对称短路措施,隔离供电源保护电机,并且三相短路产生的制动转矩也将迫使电机减速至稳定。图1为PMSM三相短路示意图。

图1 PMSM三相短路示意图
三相对称短路稳态时,约束条件为定子三相电压突降为零,故在自然(a,b,c)坐标系下定子电压方程:
(11)
在同步旋转(d,q)坐标系下定子电压方程:
(12)
在静止(α,β)坐标系下定子电压方程:

[(Ld-Lq)(ωeid-piq)+ωeψf]·
(13)
2.2 仿真验证
借助MATLAB/Simulink仿真平台搭建PMSM在故障状态下仿真模型,以验证以上参数模型的有效性和正确性,将之代入基于闭环速度和电流控制的简单三相PMSM矢量控制系统中,其中转速环是由PI调节器构成,电流环由电流滞环控制器构成,如图2所示。
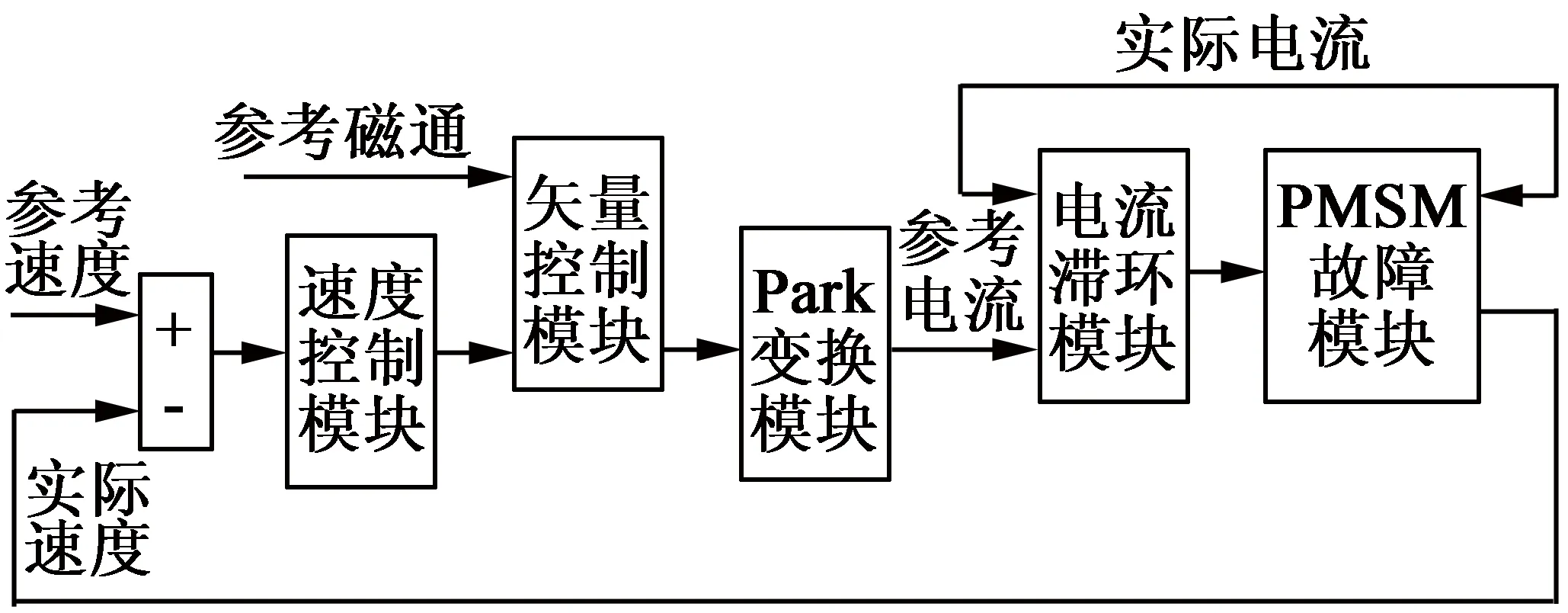
图2 PMSM矢量控制框图
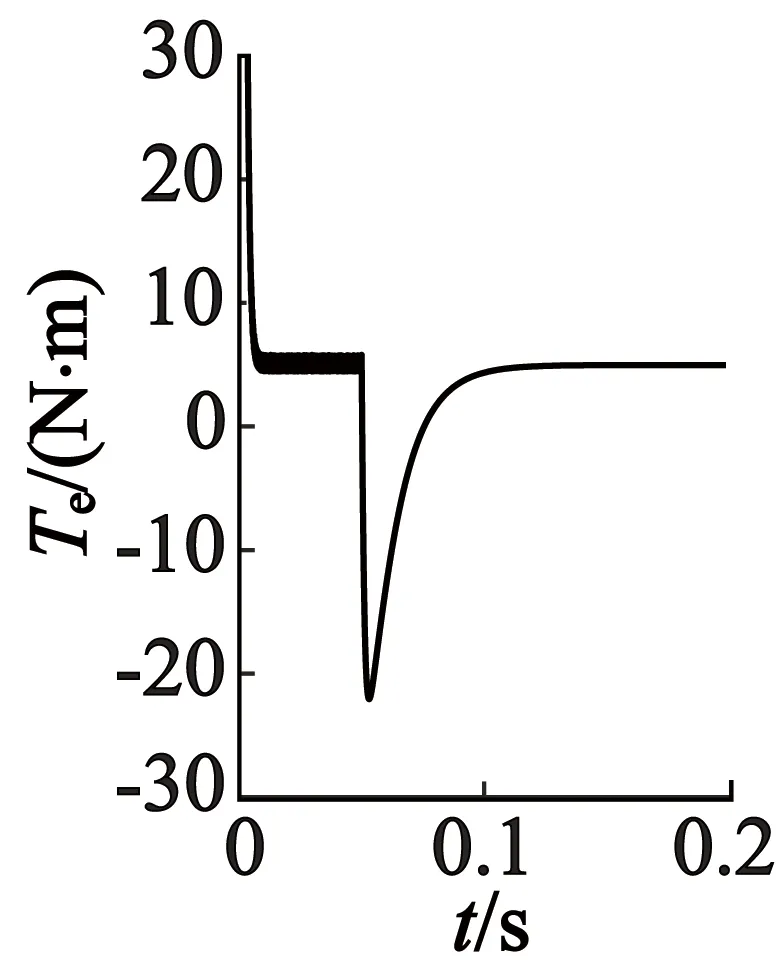
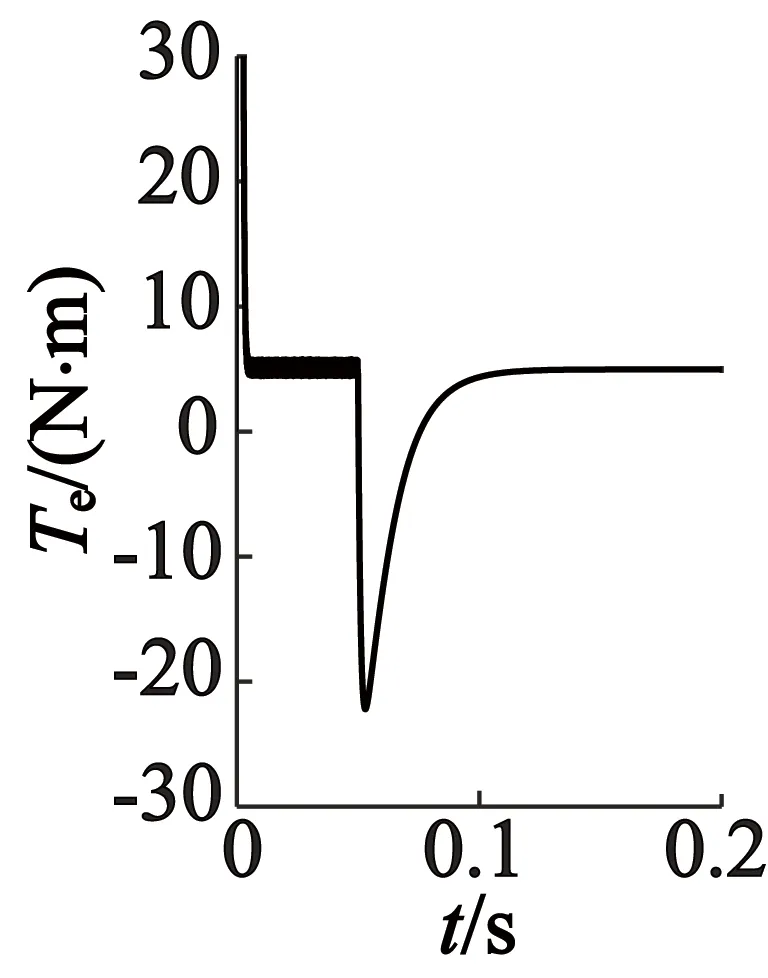
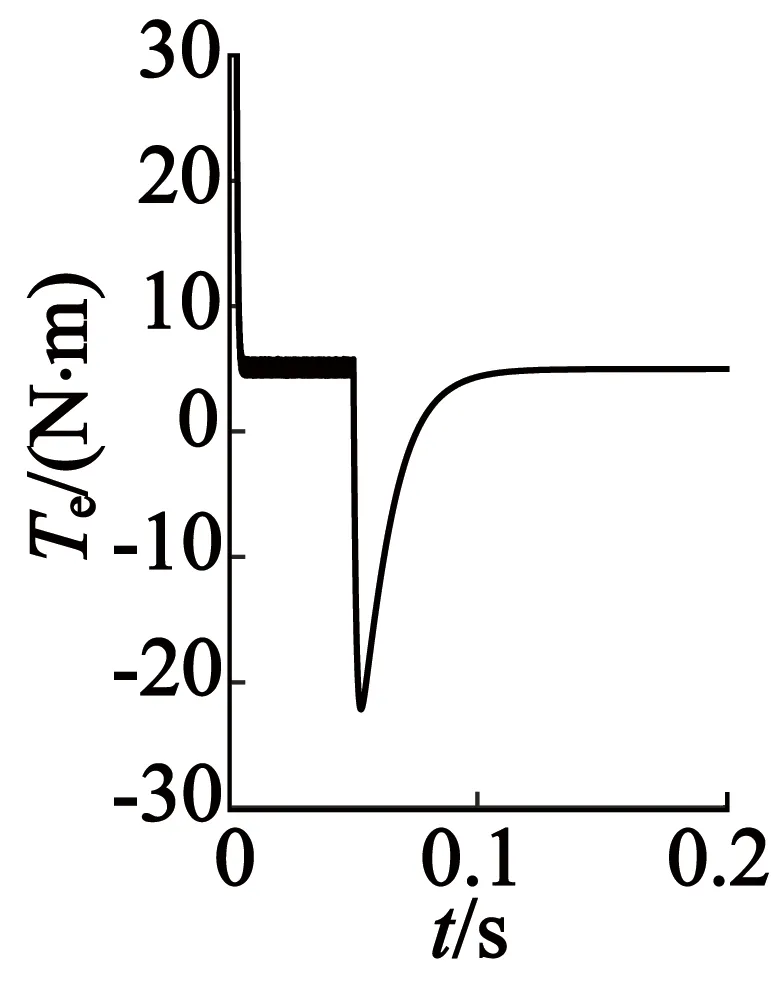
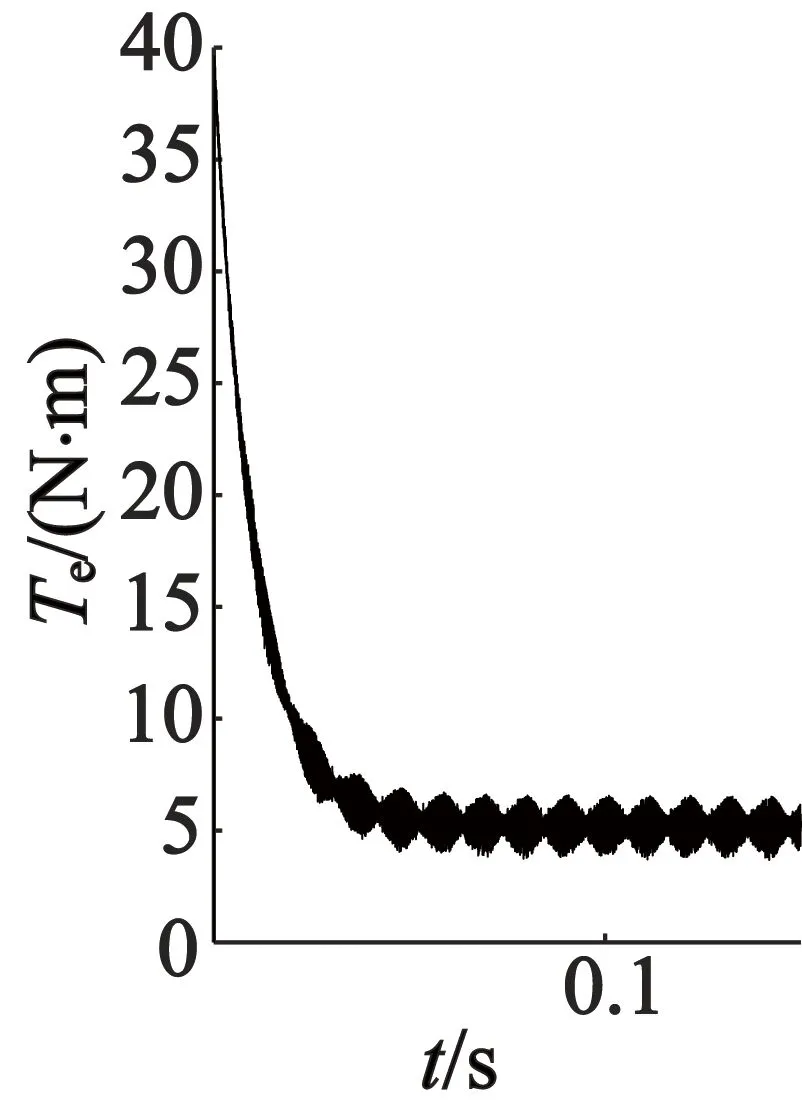
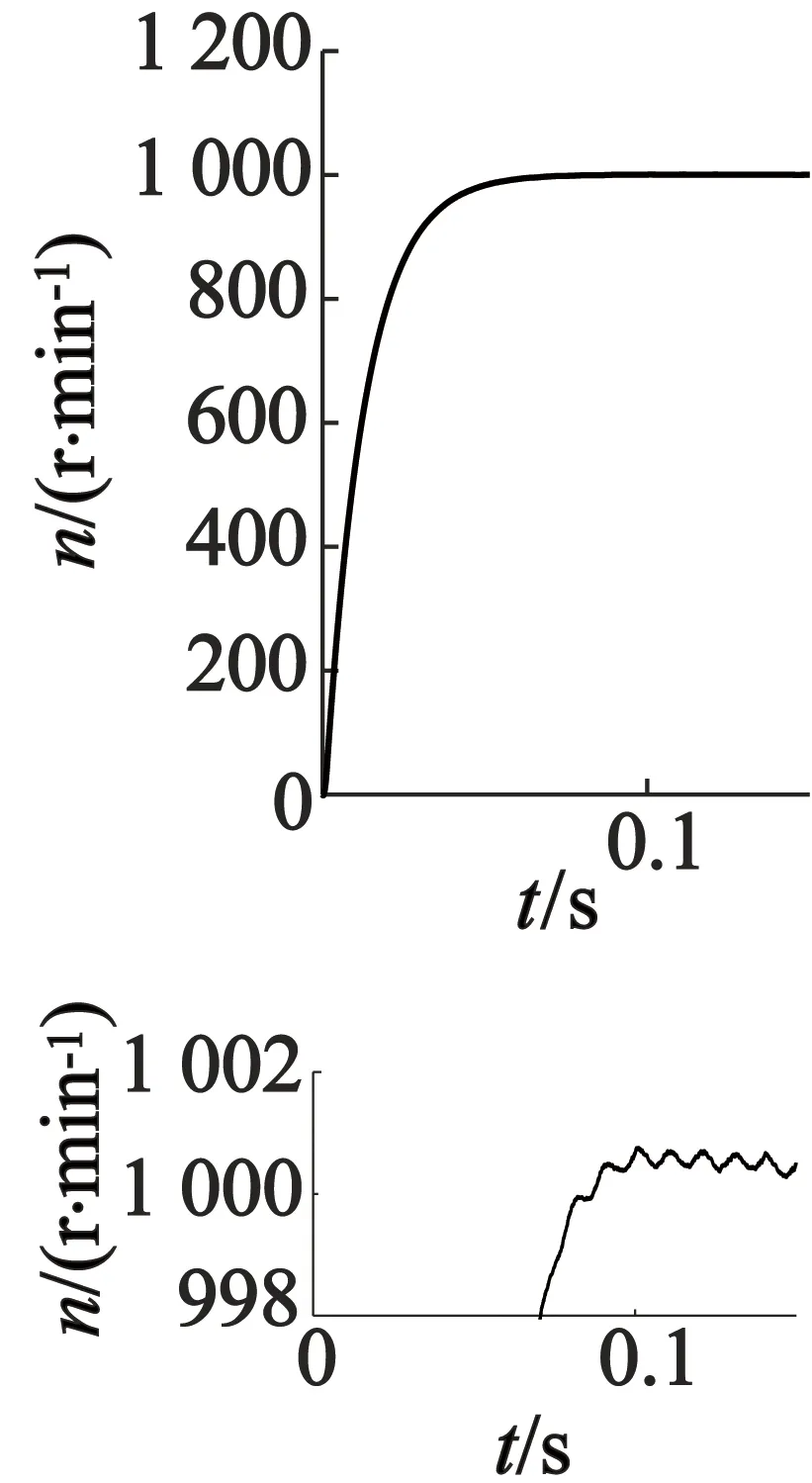
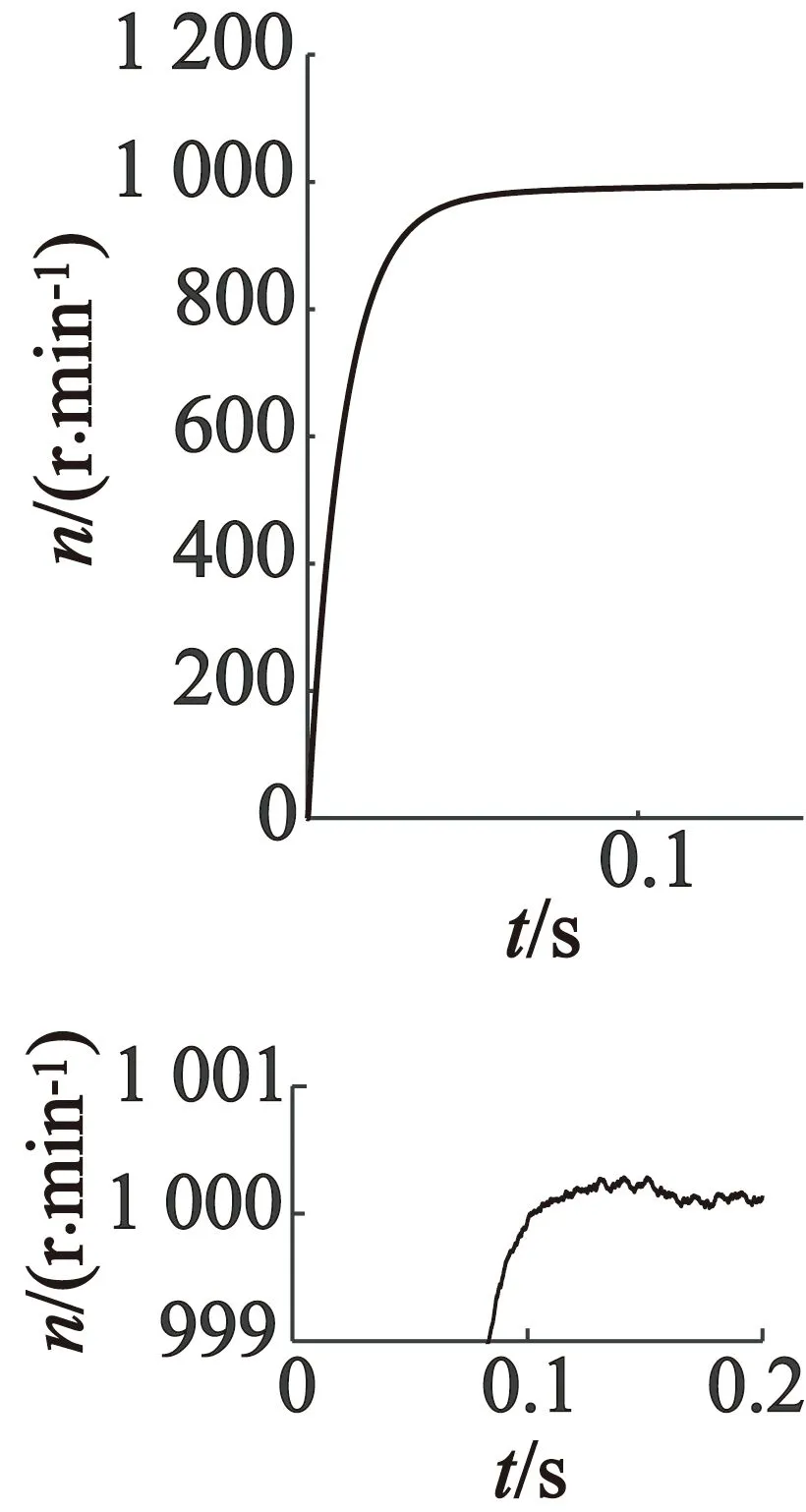
用于仿真的电机主要参数如下:运行速度1 000 r/min,母线直流电压Udc=300 V,参考转速n=1 000 r/ min,极对数p=3,定子电阻Rs=1.5Ω,相自感L=1.725 mH,相互感M=0.028 mH,转动惯量J=0. 003 6 kg·m2,阻尼系数B=0.001 N·m·s。仿真条件设置:初始时刻负载转矩TL=5 N·m,在t=0.05 s时设置三相对称短路故障,获得的仿真波形如图3~图5所示。
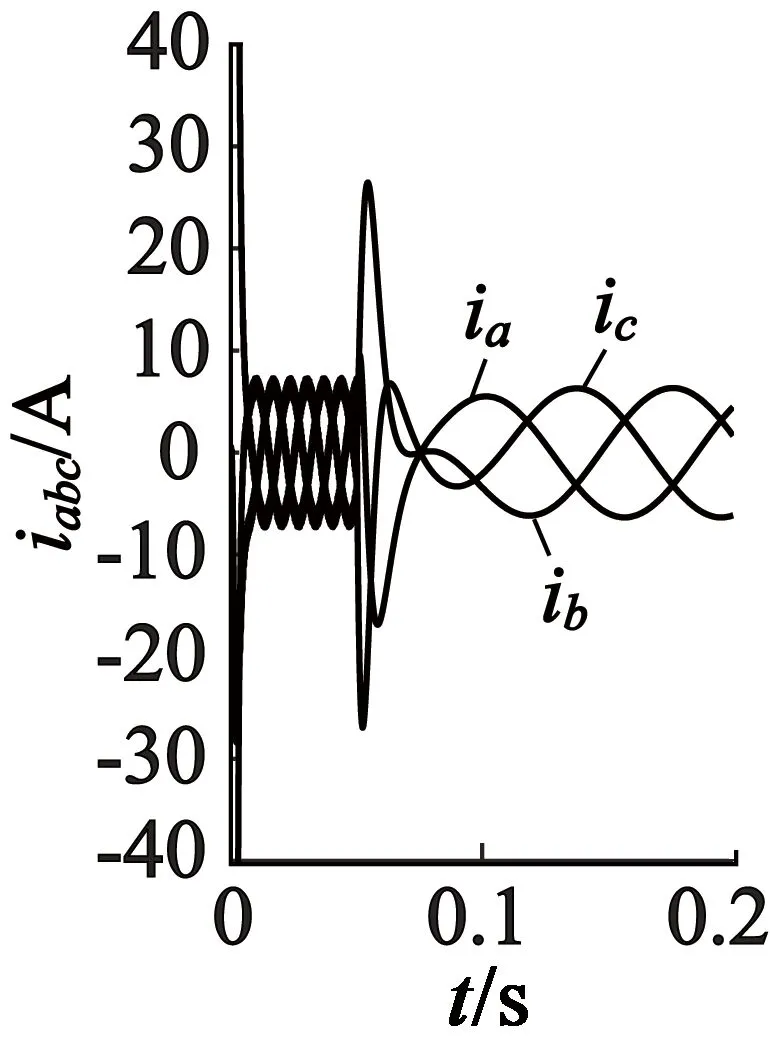
(a) a,b,c坐标系
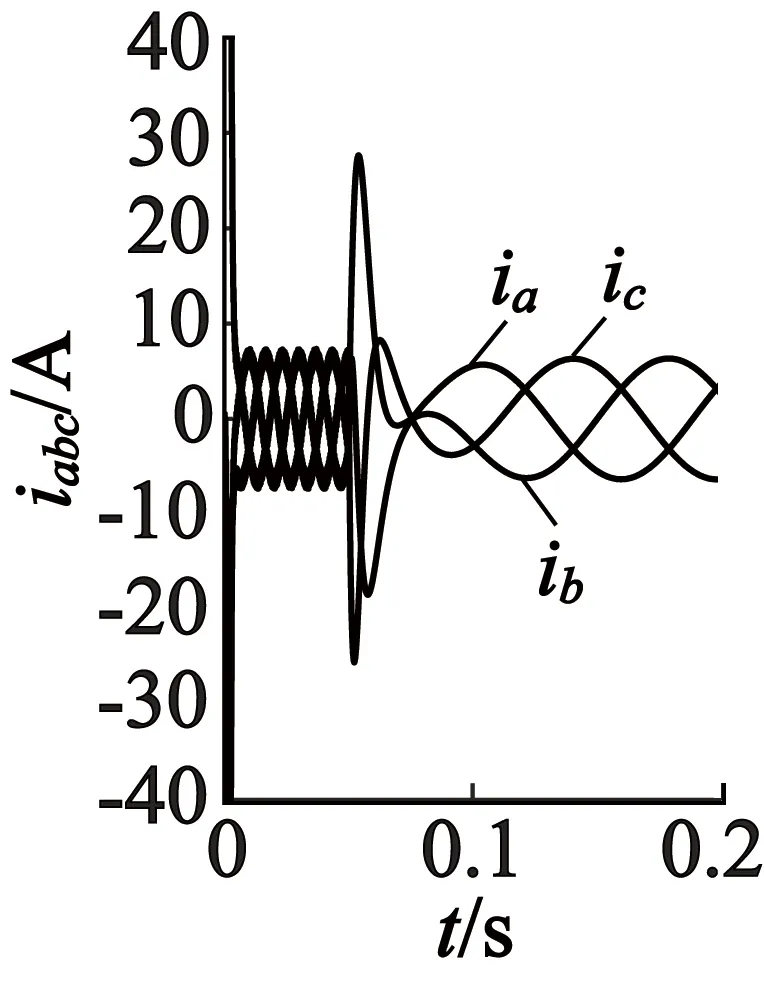
(b) d,q坐标系
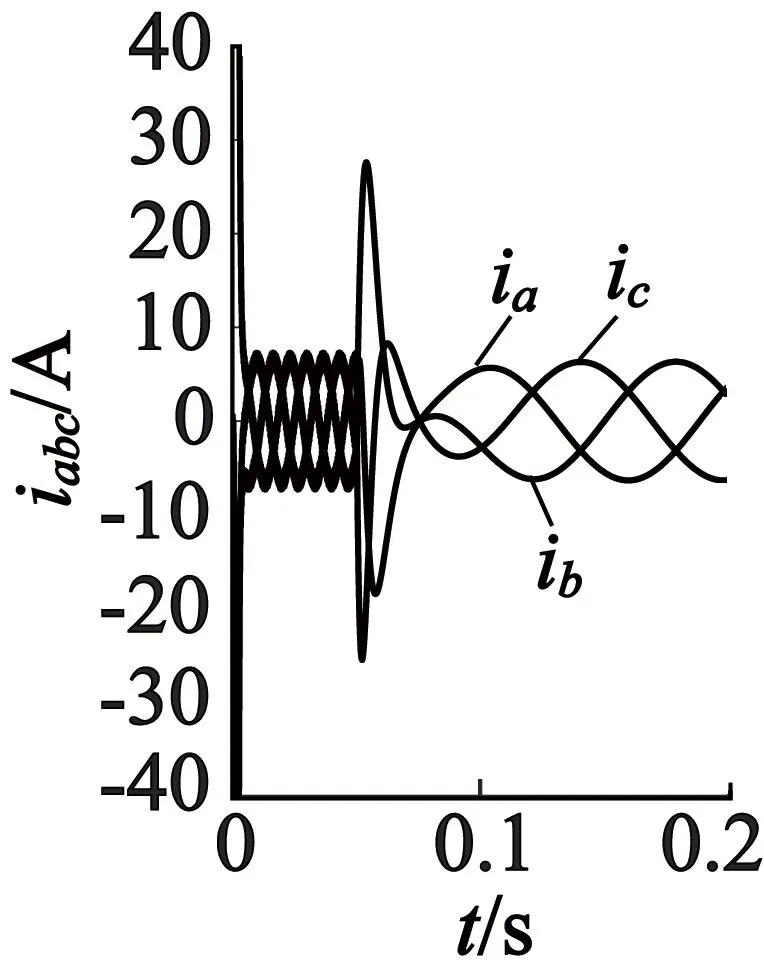
(c) α,β坐标系
(a) a,b,c坐标系
(b) d,q坐标系
(c) α,β坐标系

(a) a,b,c坐标系

(b) d,q坐标系
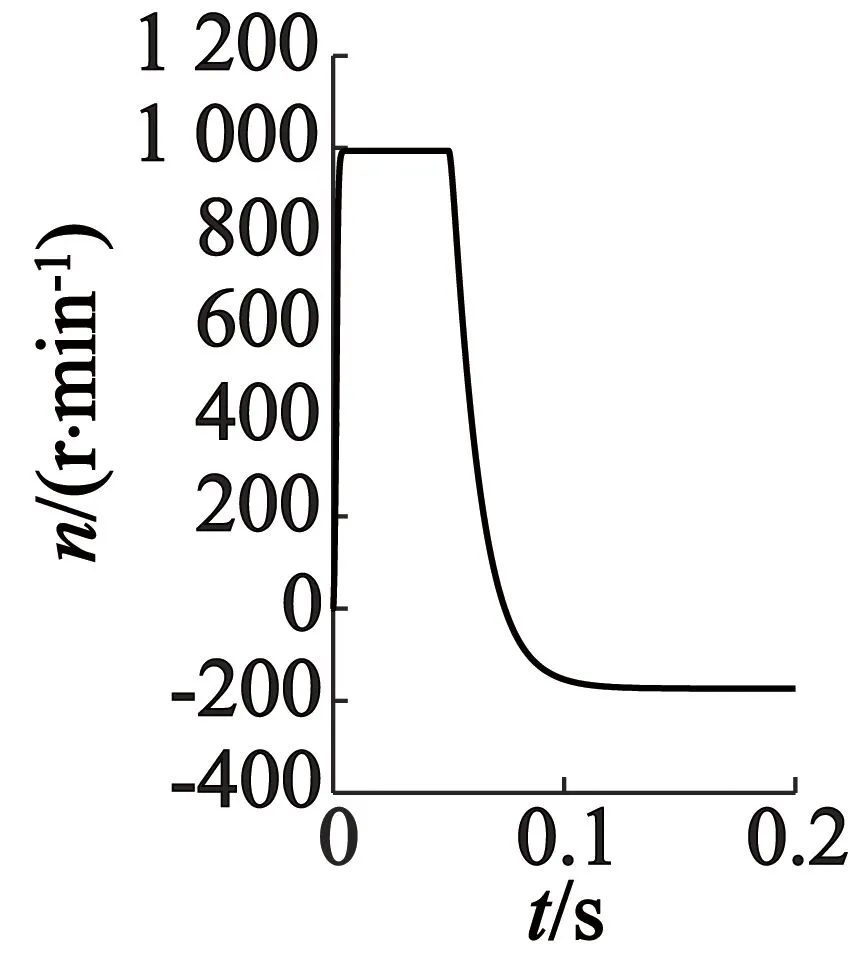
(c) α,β坐标系
由图3~图5可以看出,PMSM正常和故障时三种坐标下的电机三相电流、转矩及转速都十分接近。另外从波形可知,在0.05 s发生故障时,出现的瞬态三相电流及转矩都比稳态时大得多,此时出现的过电流是因为定子电压突降为零,导致定子磁链空间矢量变化率也降为零,因为定子磁链不能突变,在系统中产生定子磁链直流分量,进一步引起电机的过电流,之后电流回归稳态,转速也因三相短路产生的制动转矩在不断下降至稳定。
3 PMSM匝间短路故障下建模仿真
PMSM定子绕组匝间短路故障常常是因为绝缘损坏导致,此后也许还会引起更严重的损坏。假设PMSM发生A相匝间短路故障,n为短路匝数,N为故障相总匝数,rf为短路电阻,Rf为短路匝内电阻,R为相电阻,则故障示意图如图6所示。
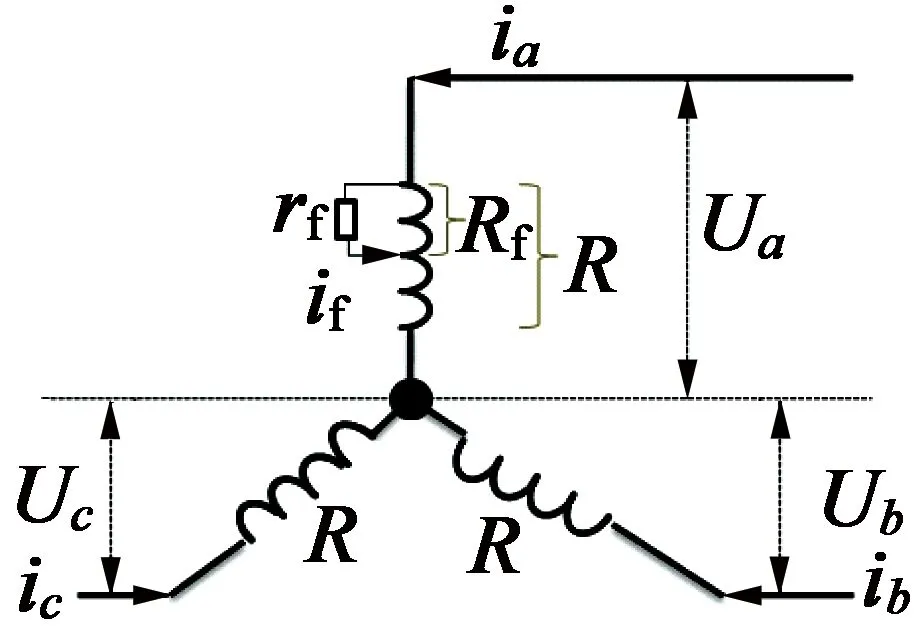
图6 PMSM A相匝间短路示意图
3.1 匝间短路故障在a,b,c坐标系下数学模型
与正常PMSM相比,发生匝间短路故障时电路中增加了故障环,假定用k表征故障的严重程度,通过分析,可得定子电压方程:
(14)
其中各变量的含义分别如下:
Rb=(1-k)Rs
Rf=k(Rs+rf)
ψabcf=LsfIabcf+ψfFabcf(θ)
3.2 匝间短路故障在d,q坐标系下数学模型
不考虑电机磁场饱和,当PMSM发生A相匝间短路故障时,PMSM在匝间短路故障情况下的电压方程式(1)可表示[10]:
(15)
当永磁同步电机A相发生故障时:
自然(a,b,c)坐标系变换到静止(α,β)坐标系的坐标变换为Clarke 变换;Park变换则是将静止(α,β)坐标系转化成同步旋转坐标系的变换。可通过Clarke/Park变换实现电机定子电压方程从自然(a,b,c)坐标系到旋转(d,q)坐标下的坐标变换:
Xdq=T(θ)Xabc
其中变换矩阵T(θ):
定子电压方程(15)经过上述变换后:
(16)

(17)
短路电流部分[11]计算公式:
而由d,q坐标系变换到a,b,c坐标系变换有:
Ua=Udcosθ-Uqsinθ
故可得:
(18)
3.3 匝间短路故障在α,β坐标系下数学模型
可通过Clarke变换实现的电机从自然(a,b,c)坐标系到静止(α,β)坐标下的坐标变换,与在同步旋转坐标下变换相似,当PMSM发生A相匝间短路故障时,可将式(15)由a,b,c坐标系变换为α,β坐标系:
Xαβ=X(θ)Xabc
其变换矩阵X(θ):
(19)
对于表贴式PMSM,Ld=Lq,定子电压方程式(15)经过上述变换后:
(20)
(21)
短路电流部分等式:
而由反Clarke变换有:
Ua=Uα
故可得:
(22)
3.4 仿真验证
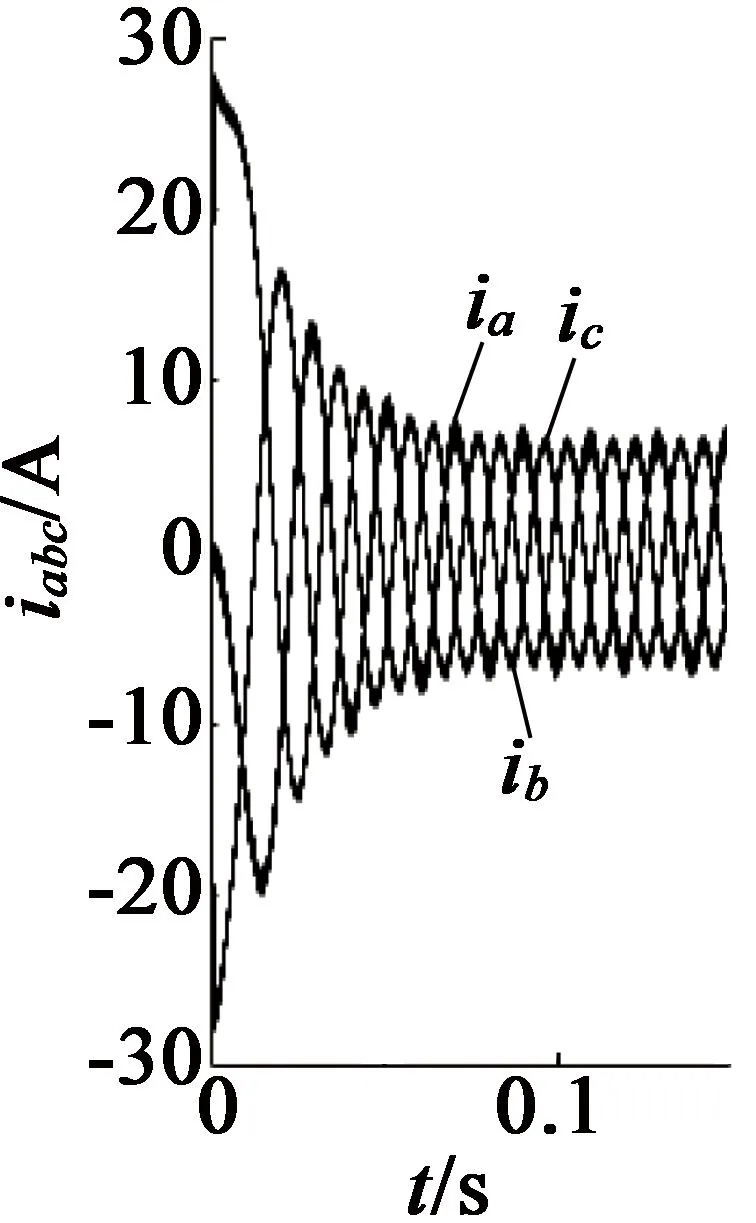
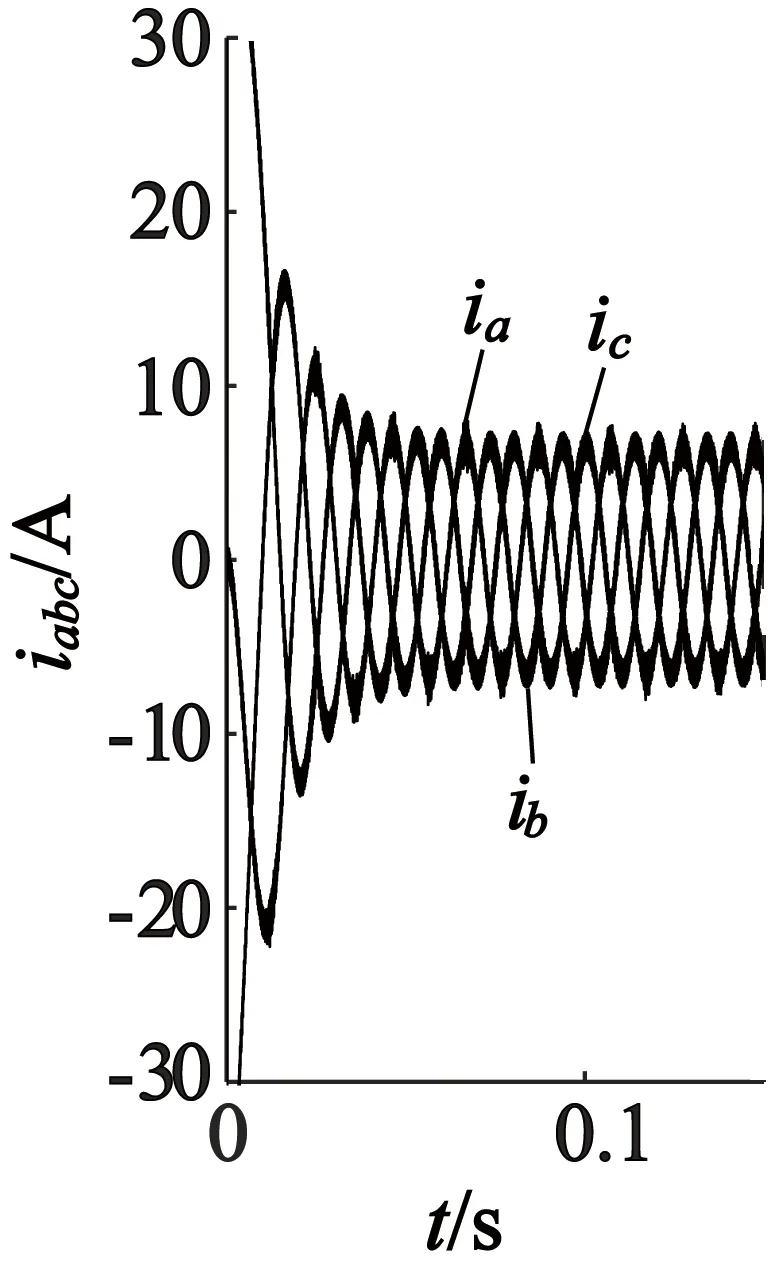
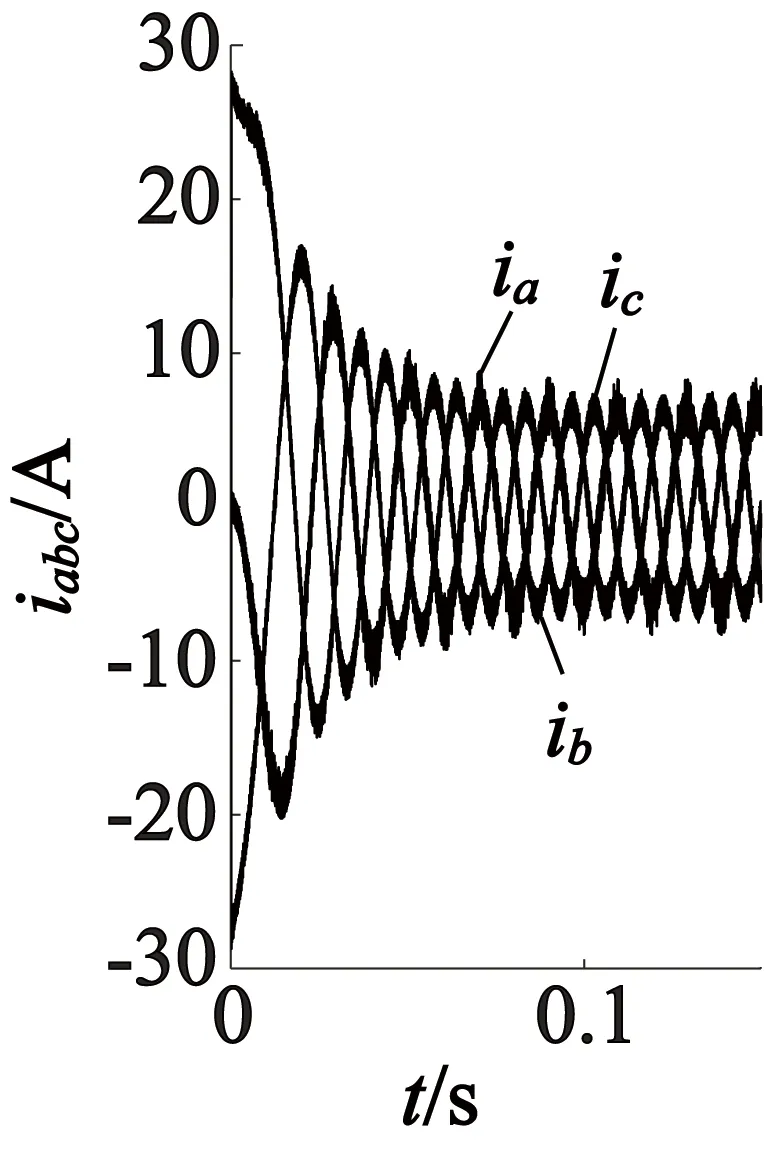
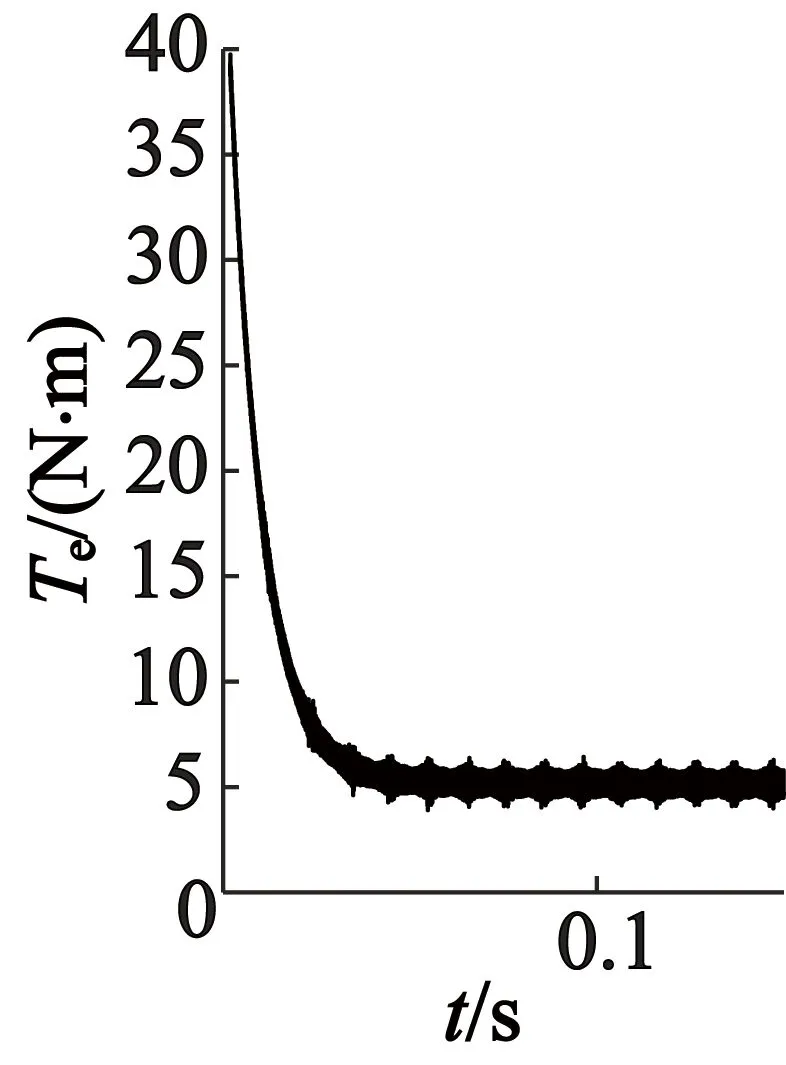
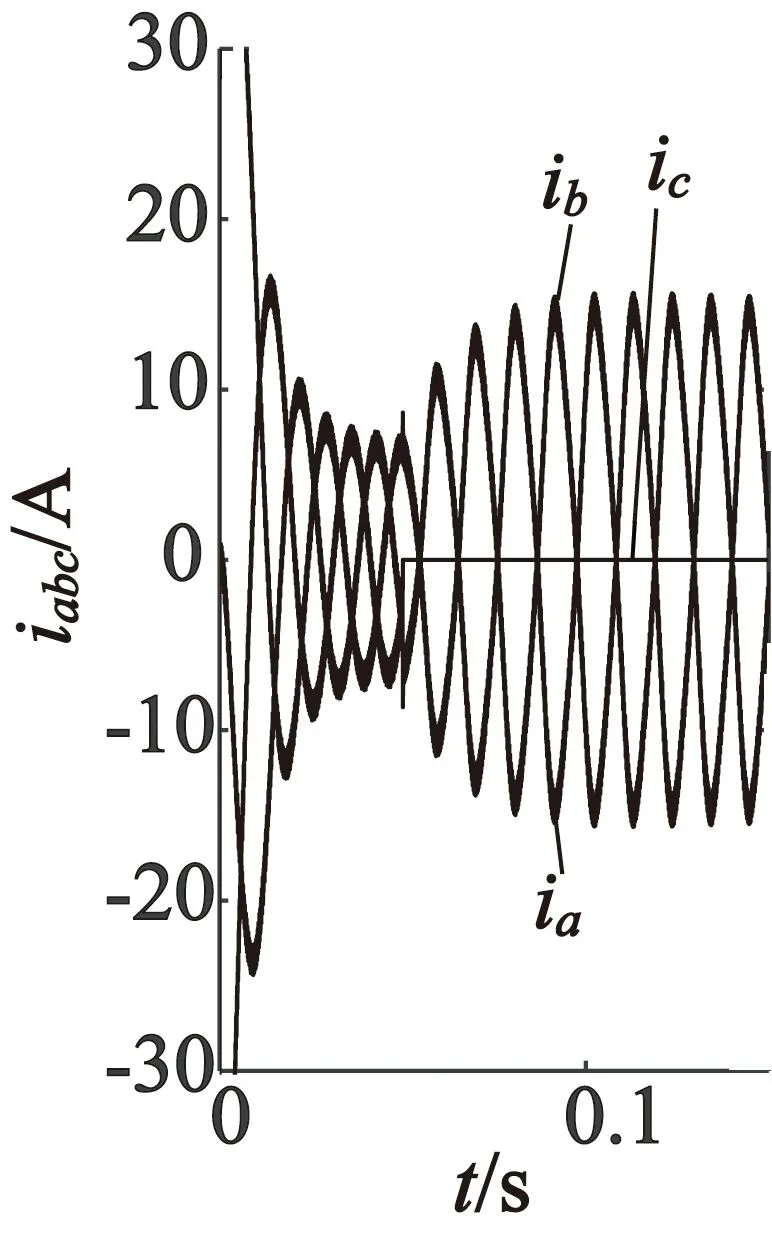
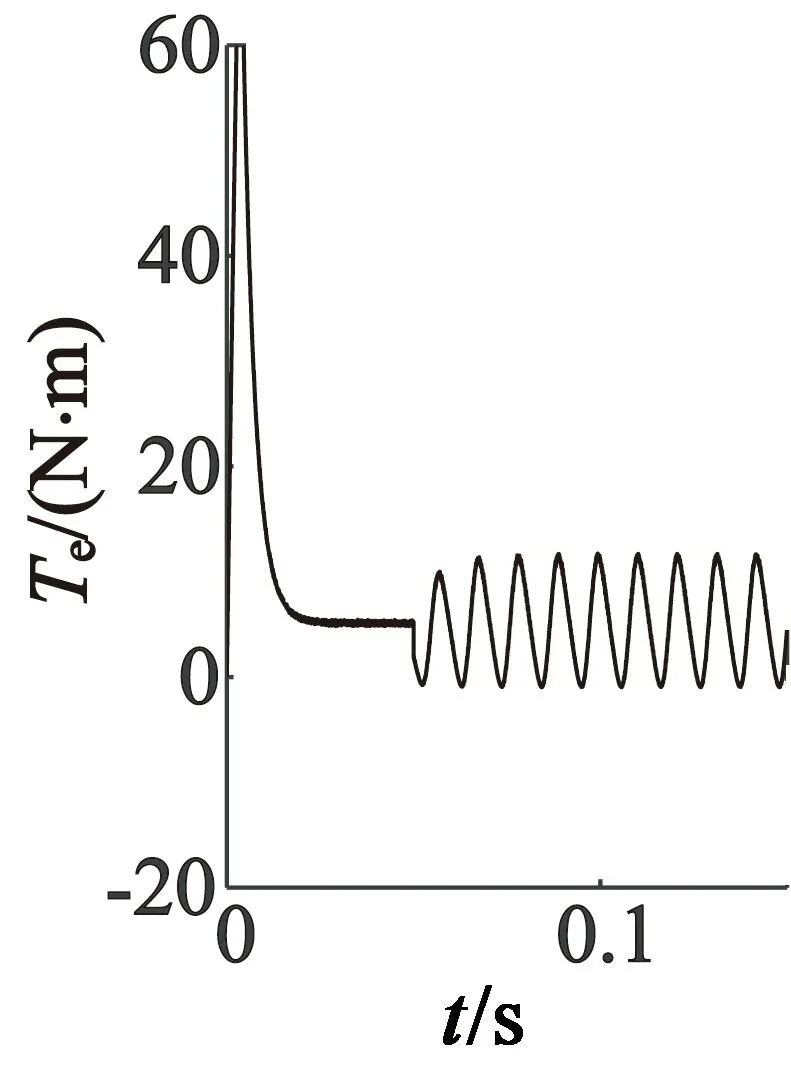
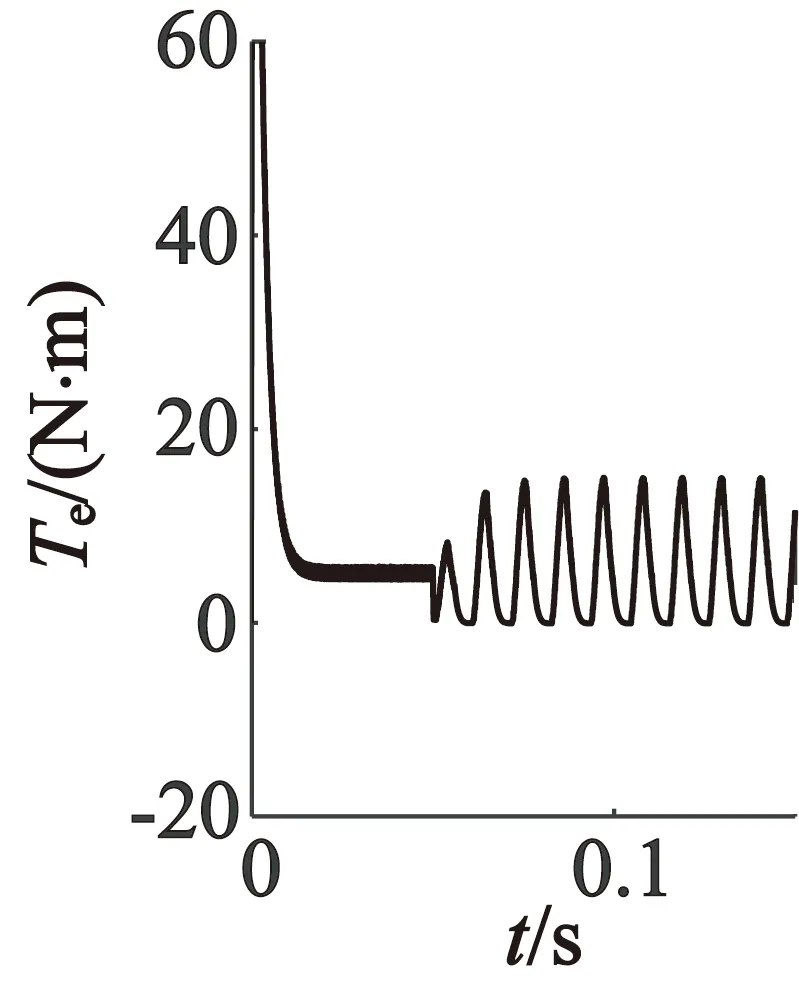
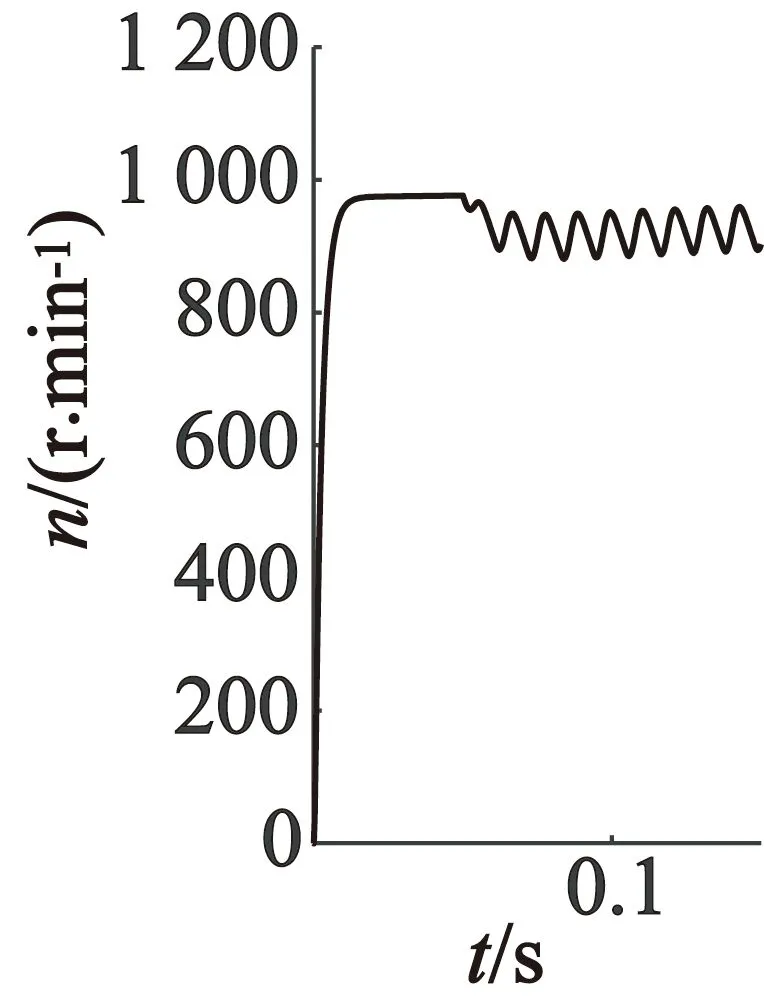
在上述同一PMSM的参数下,仿真条件设置:匝间短路故障系数k=0.3,初始时刻负载转矩TL=5 N·m,获得仿真波形,如图7~图9所示。
(a) a,b,c坐标系
(b) d,q坐标系
(c) α,β坐标系

(a) a,b,c坐标系
(b) d,q坐标系
(c) α,β坐标系
(a) a,b,c坐标系
(b) d,q坐标系

(c) α,β坐标系
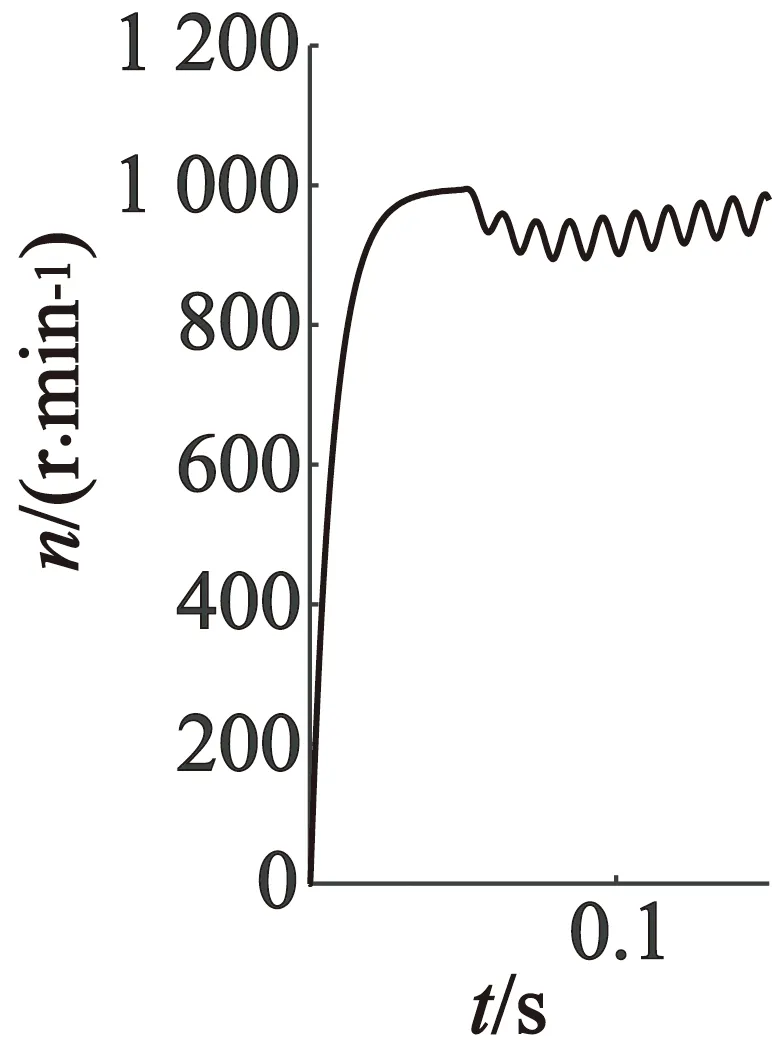
从以上仿真结果可以观察到:发生匝间短路故障时PMSM在三种坐标下的仿真波形很接近,不过通过PI调节器实现的电流闭环跟踪控制,难以消除电流跟踪误差, 因此三种坐标下的波形并不能完全一致[1];在匝间短路故障时,故障A相电流幅值较其它两相更大[12],这是由于绕组不对称,导致A相电流比其它两相电流有更为明显增大的高次谐波成分;电磁转矩和转速也产生了谐波成分,出现了小幅度波动。
4 PMSM开路故障下建模仿真
开路故障也是一种常见的电机故障。焊接不良,绕组短路,接地故障等都可以导致电机绕组开路。电机A相发生开路故障示意图如图10所示。
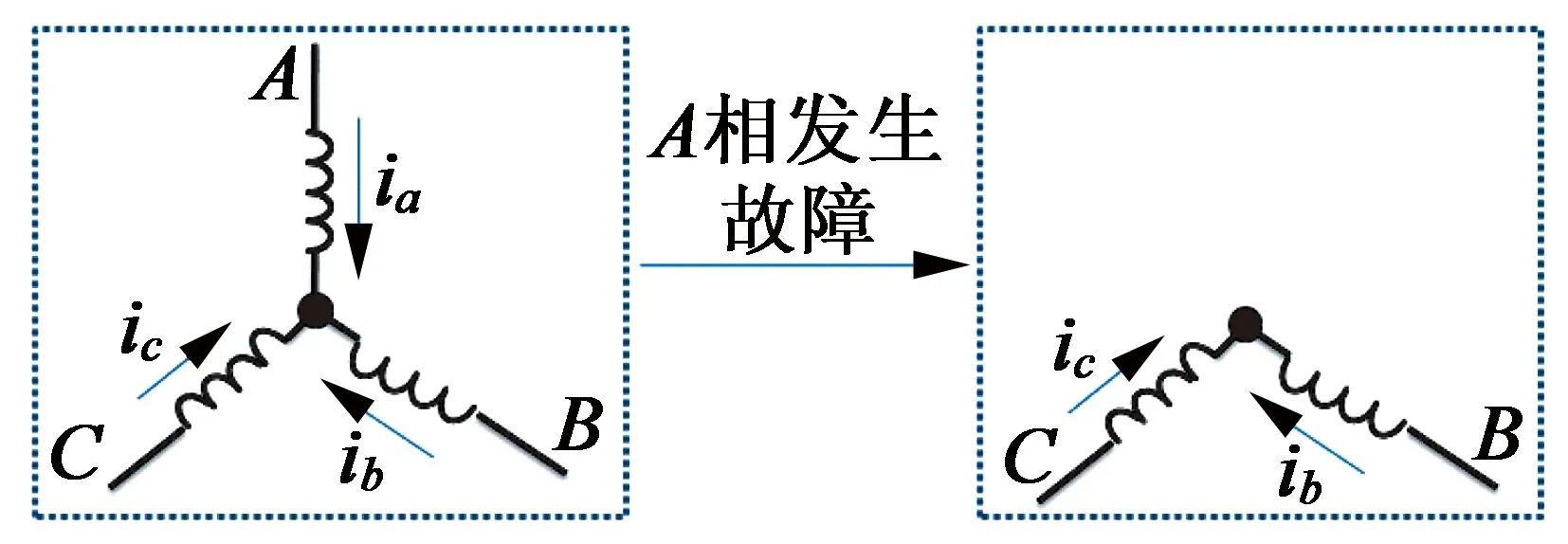
图10 PMSM A相开路故障示意图
4.1 开路故障在a,b,c坐标系下数学模型
假设定子绕组A相发生开路故障,则A相电压Ua=0[13],三相电流不再对称[8,14],A相电流由于电流传感器出现轻微偏差,导致ia=iΔ不为0,但十分接近0,通常认为ia=0,电流方程满足如下表达式:
(23)
故障时可代入定子电压方程:
(24)
式中:Ua,Ub与Uc分别为三相电压;ia,ib与ic为三相电流;Ra=Rb=Rc=Rs为定子绕组电阻;ψf为永磁体磁链值。
4.2 开路故障在d,q坐标系下数学模型
假定定子绕组A相发生开路故障,则通常认为ia=0。根据从同步旋转d,q坐标系到自然a,b,c坐标系的变换:
可得:
ia=0=idcosθ-iqsinθ
(25)
根据Clarke 变换:

得:
Uβ=Udsinθ+Uqcosθ
(26)
将d,q坐标系下的定子电压方程式(3)代入式(26),则有:

(27)
为了消除计算电流id,iq时出现在分母中的sinθ,cosθ引起的奇异点,引入两个辅助变量ρ和ξ,并令:
(28)
(29)
由式(25)可得:ρ=ξ,再将式(28)、式(29)代入式(27),此时Uβ可用ρ变量表示,求解辅助变量ρ得:
(30)
求出ρ后,根据式(28)可得定子电流id,iq有:
(31)
此后即可顺利求出电机中角速度、转矩、转速等其它变量,建立PMSM开路故障的电机模型。
4.3 开路故障在α,β坐标系下数学模型
为不失一般性和利于计算求解,假定PMSM定子绕组C相发生开路故障,其实对于单相开路而言假定C相或A相发生开路故障等效,则C相电压Uc=0,且此时通常认为ic=0。根据反Clarke变换:
可得:
化简得:
(32)
根据Clarke变换:
PMSM静止坐标系下的定子电压方程式如下,对于表贴式PMSM而言,Ld=Lq,可进一步简化:

[(Ld-Lq)(ωeid-piq)+ωeψf]·
简化后代入可得:
(33)
在得到iβ后,利用式(32)可得iα,后可顺利求出电机中其它变量,获得α,β坐标系下电机开路故障时电机模型。
4.4 仿真验证
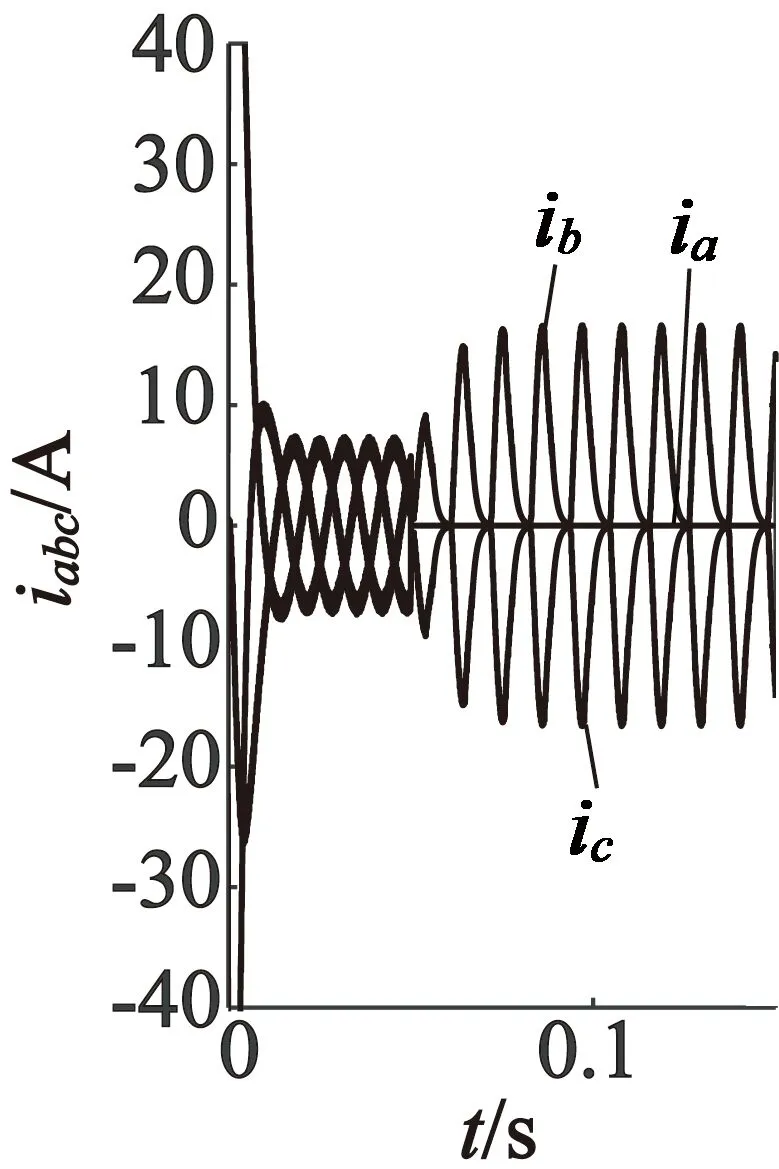
在上述同一PMSM的参数下,仿真条件设置:负载转矩TL=5 N·m,t=0.05 s时设置PMSM单相开路故障,获得仿真波形,如图11~图13所示。

(a) a,b,c坐标系
(b) d,q坐标系
(c) α,β坐标系
(a) a,b,c坐标系
(b) d,q坐标系

(c) α,β坐标系

(a) a,b,c坐标系
(b) d,q坐标系
(c) α,β坐标系
从以上仿真结果可以看出,当PMSM发生单相绕组开路故障时,三种坐标系下的波形很接近。与正常运行时的0~0.05 s时间段相比,故障时三相电流的幅值比正常时幅值要大,并且此时PMSM的电磁转矩和转速都产生了较大脉动。这是由于当某相电流突变为零时,这相磁动势同样是零,而定子电流合成的磁势将会由圆形变成椭圆形,由此生成的椭圆形磁链将会生成接近电机转速频率的转矩脉动。
5 结 语
本文围绕PMSM三种常见故障,在三种坐标系下重新推导了数学参数模型,并采用MATLAB/Simulink建模仿真的方法来验证。仿真结果表明,三种坐标系下的PMSM故障下的波形很接近;同时获得了PMSM在三相对称短路故障,匝间短路故障和开路故障的故障特征信息,可作为故障诊断、故障容错和状态监测的研究基础。
本文在三种坐标系下都建立了PMSM的电机模型,能够满足在不同场合选择合适的数学模型,也为PMSM模拟器系统提供了可供选择的常见故障的电机模型,以此来测试电机驱动器在常见故障状态下的性能指标。
