基于预适应路径追踪的收割机RAC导航系统
2020-05-23张文利陈开臻伟利国苑严伟
张文利,郭 宇,陈开臻,伟利国,苑严伟※
(1.北京工业大学信息学部,北京100124;2.中国农业机械化科学研究院,北京100083)
0 引言
近年来,随着卫星定位数据精度提高,各类路径追踪方法层出不穷,越来越多的高精度农机自动驾驶系统被研发、生产。通过在传统的农用机械上部署自动导航系统,能够实现农机的全自动作业,满足了精准农业的需求[1-2]。
伟利国、李逃昌、Erkan等国内外众多学者提出了使用基于模糊控制理论的农机路径追踪方法[3-9];石翔、唐小涛等提出了一种对纯追踪模型中的前视距离参数使用模糊控制理论进行动态调整的方法[10-11];罗锡文等提出了一种动态切换PID控制和模糊控制的农业机械导航控制方法[12];黄沛琛等通过BP 神经网络确定纯追踪模型中的前视距离参数[13];Han 等使用迭代法实现了车辆模型参数估计,设计并实现了基于纯追踪模型的路径跟踪控制器[14];陈宁等提出了一种改进型纯追踪控制器[15];于万鹏、马志艳、谢忠华等提出了使用基于视觉的路径追踪方法[16-18]。
综合分析已有研究成果可知,模糊纯追踪模型因其简单有效,被广泛应用于路径追踪领域,当采用模糊纯追踪模型作为农机路径追踪方法时,往往将农机简化为Kelly提出的二轮车模型[19-21]。根据纯追踪模型原理可知,前视距离是影响追踪效果的重要因素。引入模糊控制理论的模糊纯追踪模型,通过建立模糊控制规则表,对纯追踪模型的前视距离参数进行动态调整,能够提高模型动态追踪能力。然而模糊纯追踪模型是根据已经产生的位姿偏差对车辆进行校正,即每次前视距离参数的动态调整都是依据上一周期的位姿偏差结果,而不是当前位姿偏差结果,因此导致路径追踪模型误差较大,追踪精度较低。
因此,文章提出了一种预适应路径追踪模型,在模糊纯追踪模型的基础上引入预测控制理论,通过内置收割机运动学模型,对收割机下一周期运动状况进行预测,根据预测的当前周期位姿偏差结果调整前视距离参数,从而提高追踪精度,降低误 差。
1 收割机RAC导航系统
收割机RAC(Realtime Array Calibration)导航系统由卫星接收机、车载终端和电控方向盘组成(图1)。车载终端通过分析卫星接收机传入的收割机位置、航向信息,结合预先设定的轨迹,即可输出收割机前轮转角控制量,驱动电控方向盘控制收割机转向。传统的农机自动导航系统的设计中,为了获得较为精准的卫星定位信息,常采用RTK卫星接收机作为定位装置,然而RTK 设备价格昂贵,部署较为繁琐,采用RTK 设备提高了投入成本和部署难度,然而有些农机作业并不需要精度太高即可正常工作,例如收割机作业时,并不需要cm级路径追踪精度。为了降低自动导航系统的投入成本,该文采用RAC 设备代替RTK 设备进行卫星信号的接收,由于RAC设备仅采用普通民用单频信号GPS L1 或者北斗B1即可实现亚米级别定位,相比于RTK 设备,价格低廉,安装调试简单方便,精度也能满足收割机作业需求。
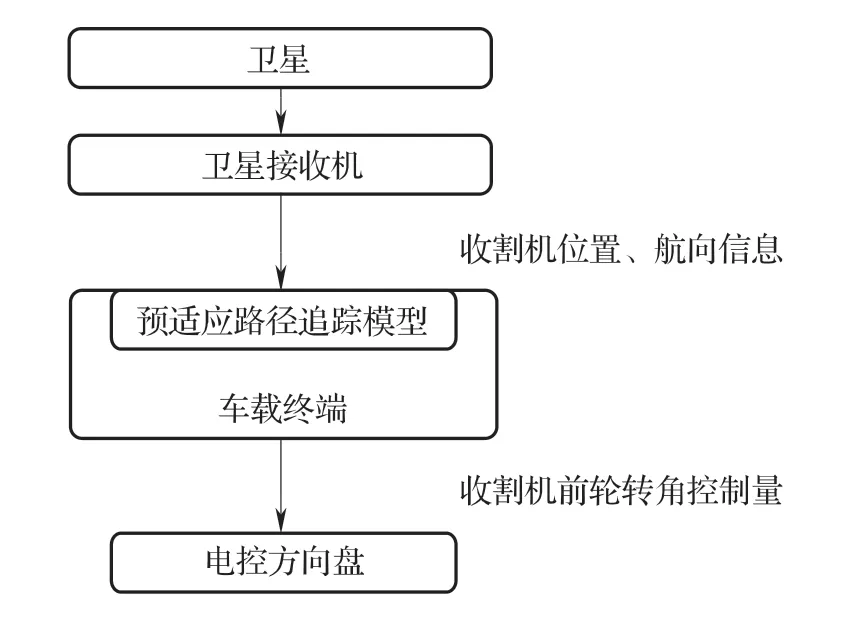
图1收割机RAC 导航系统框图Fig.1 Block diagram of harvester automatic navigation system
2 预适应路径追踪模型的设计
工作流程如图2所示,主要分为以下几步:(1)农机在作业过程中,将本周期的车辆位置、航向信息输入到模糊纯追踪模型中,结合模糊纯追踪模型内置追踪路径信息,实时计算本周期前轮转角控制量。(2)该控制量作为预测模块的输入,结合预测模块中内置的农机运动学模型,预先计算下周期车辆位置、航向信息。(3)同(1),该位置、航向信息作为输入量再次被输入到模糊纯追踪模型中,进而获得预测前轮转角控制量。(4)将获得的本周期前轮转角控制量、预测前轮转角控制量、本周期位置航向信息和预测位置航向信息输入到综合模块,综合模块根据上述农机位姿信息提前一周期判断农机出轨情况,预先对前轮转角控制量做出调整,控制农机进行路径追踪。

图2预适应路径追踪模型流程图Fig.2 Flow chart of pre-adaptive path tracking model
根据纯追踪模型原理,收割机前轮转角控制量满足公式(1):

式(1)中,Cy为收割机前轮转角控制量,m为收割机轴距,Ep为收割机到追踪点的横向误差,Ey为收割机到追踪点的航向误差。
在纯追踪算法中,由于前视距离是固定的,因此在直线追踪和曲线追踪共同存在的场景下,容易发生出轨或者震荡现象。通过引入模糊控制器,实时生成前视距离,解决该问题。根据模糊控制器设计原则,模糊控制器设计分为以下几步。
①确定输入变量
将车辆与追踪点的偏移误差和车辆与追踪点的航向误差作为输入变量,将前视距离作为输出变量。车辆与追踪点的偏移误差为L,车辆与追踪点的航向误差为Y,前视距离为E。
②确定论域、模糊集
L、Y和E的模糊集均为{NB,NM,NS,ZO,PS,PM,PB},其中NB表示负大(Negative Big),NM表示负中(Negative Middle),NS表示负小(Negative Small),PS表示正小(Positive Small),PM表示正中(Positive Middle),PB表示正大(Positive Big),在模糊控制中用来表示隶属关系;论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。
③确定隶属函数
如图3所示,采用三角形隶属函数,其中L、Y 和E均采用该隶属函数。

图3隶属函数Fig.3 Membership function
④建立模糊控制规则表
如表1所示,根据农机在实际作业中的情况,总结经验得到49条规则,建立前视距离的模糊控制规则表。

表1前视距离模糊控制规则表Table1 Fuzzy control rule table of forward looking distance
预测模块可以在农机开始作业之前,将农机运动学模型输入模块中,当模糊纯追踪控制器计算出前轮转角控制量后,预测模块先行将该控制量输入到农机运动学模型中,计算下一个周期农机位置的改变,通过该模块,可以获得“预测航向误差”和“预测位置误差”2个预测量。
如图4所示,当通过模糊纯追踪控制器获得t周期控制量Cy(t)后,将该控制量输入预测模块,根据公式(2)至(4),即可预测收割机t+1 周期运动状态信息和误差信息。
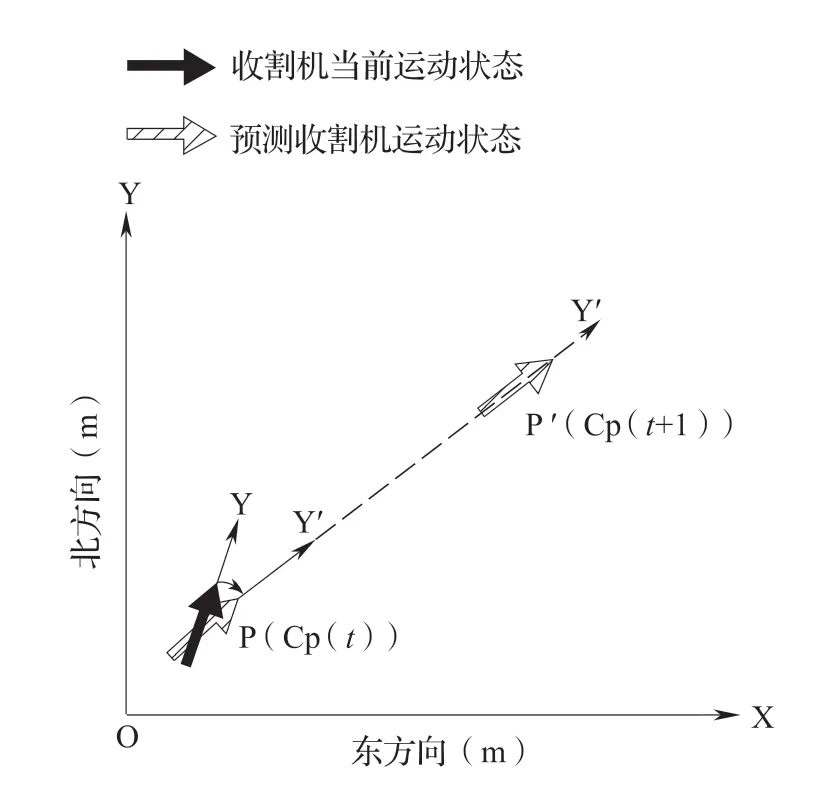
图4预测模块原理示意图Fig.4 Schematic diagram of prediction module

式(2)至(4)中,Y为收割机航向,Cp为收割机位置,Cpx为Cp在X轴上的分量,Cpy为Cp在Y轴上的分量,v为收割机运行速度,Δt为控制周期时间。
将预测的运动状态信息重新输入到模糊纯追踪模型中,即可获得收割机t+1周期预测控制量Cy(t+1)。在已知t周期和t+1周期收割机位置误差Ep(t)和Ep(t+1)的情况下,根据公式(5)可以获得收割机由t周期到t+1周期运动过程中的位置偏离系数K。

若K>0,则说明根据预测结果,收割机在t+1周期没有出轨,最终控制量为t周期控制量Cy(t);反之,若K<0,则说明收割机追踪过程中出轨,需要对控制量进行修正,参照公式(6):

式(6)中,C′y(t)为前轮转向角综合控制量,为比例系数,理想状态下,农机沿直线追踪,且农机位置时刻处于直线上,农机航向与直线延伸方向相同。其中默认取值为0.5。若在实际测试中,出现出轨抑制效果不佳现象,则应该增大,若出现出轨抑制效果过度现象,则应该减少。
3 结果分析
该研究共进行了2 个相关实验:模拟仿真实验和农机应用实验。在模拟仿真实验中,分别对模糊纯追踪模型和预适应路径追踪模型进行模拟仿真,并针对其性能参数进行分析。在农机应用实验中,通过在收割机上安装搭载预适应路径追踪模型的控制器,控制收割机进行路径追踪并对其进行误差分析。
3.1 模拟仿真实验
通过Matlab+Simulink联合平台,分别搭建模糊纯追踪模型和预适应路径追踪模型,并对2种路径追踪模型进行模拟仿真,结果如图5所示。

图5 预适应路径追踪模型和模糊纯追踪模型仿真示意图Fig.5 Pre-adaptive path tracking model and fuzzy pure pursuit model
在仿真结果中,模糊纯追踪模型误差平均值为2.364 5 m,而预适应路径追踪模型的平均误差为0.192 5 m,误差下降了91.9%。
3.2 农机应用实验
在收割机实际工作中,拖拉机行驶过程中会改变土地地形,容易造成多次测试环境不一致。该研究主要解决模糊纯追踪模型误差大问题,测试环境对控制器影响应该适当降低,因此选择在宽阔平整的柏油马路上进行收割机路径追踪测试。将搭载了预适应路径追踪模型的车载终端安装在拖拉机上,部署卫星接收机和电控方向盘。
分别在马路两端选取A点和B点,人工将收割机行驶至A 点,车头方向朝向B点,进行路径自动追踪;当路径追踪到B点时,人工将车辆驶回A 点,并重复以上过程。测试过程中,使用笔记本电脑通过串口接收日志数据(A、B 点信息,当前位置信息,航向角信息,方向盘控制信息),最后通过上位机处理软件进行数据可视化,可视化结果如图6所示。设定追踪路径切线方向为纵向,收割机上卫星接收机位置到该垂线长度为横向误差,该实验共进行了12组测试,对测试结果计算误差,其结果如表2 所示。
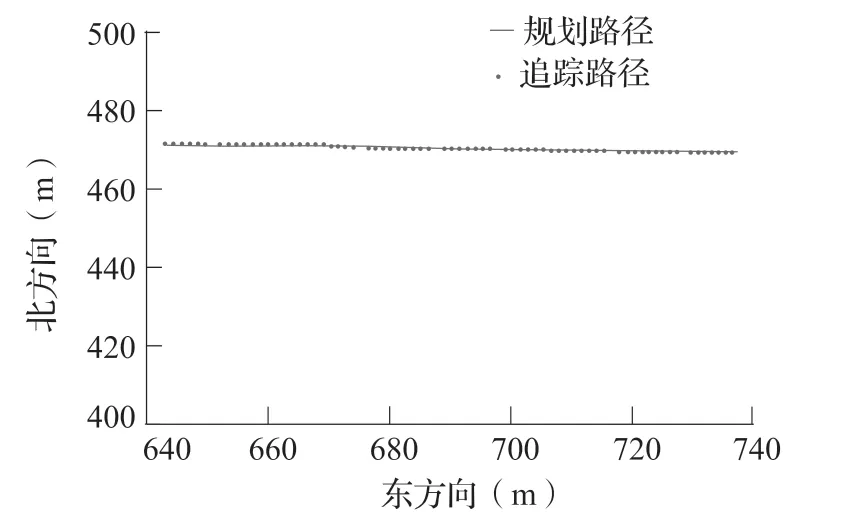
图6预适应路径追踪模型测试数据可视化示意图Fig.6 Visualization schematic diagram of test data for pre-adaptive path tracking model

表2预适应路径追踪模型横向误差统计结果Table 2 Statistical result of lateral error of pre-adaptive path tracking model
经过测试,当收割机以3 km/h的速度行驶时,采用搭载了预适应路径追踪模型的收割机RAC导航系统,路径追踪误差的平均值为0.63 m,考虑到RAC卫星接收机定位精度为亚米级,路径追踪误差符合预期。
4 结论
该文通过引入预测控制理论,对模糊纯追踪模型响应速度慢的缺陷进行改良,构建适应能力较强的预适应路径追踪模型。该模型采用高性价比RAC卫星接收设备,在满足收割机工作精度的前提下,降低了设备部署难度和设备价格。该文通过Matlab+Simulink联合平台对模糊纯追踪模型和预适应路径追踪模型进行仿真分析,发现预适应路径追踪模型追踪效果更好,平均误差得到大幅度降低。通过在收割机上使用RAC导航系统的实际测试发现,预适应路径追踪模型平均误差值为0.63 m,满足设计要求。
预适应路径追踪模型虽然经过了实际农机测试,但仅测试了速度在3 km/h 的低速状态运行情况,而农机速度会对RAC卫星接收设备以及控制器的性能产生较大影响,在今后的研究中,将进一步研究高速条件下的导航系统追踪方法,促使研究成果适应实际农机作业需要。
