机载GNSS反射信号海面测高模型的研究
2020-05-22张云张杨阳孟婉婷杨树瑚韩彦岭
张云,张杨阳,孟婉婷,杨树瑚,韩彦岭
(1.上海海洋大学 信息学院,上海 201306;2.上海航天电子技术研究所,上海 201109)
1 引言
海面高度是物理海洋、地球物理学、大地测量学等领域的基础数据。全球海面高度数据可以用于大洋环流的确定、大洋潮汐模型的建立以及中尺度气候模型的研究等,因此获取高精度海面高度对气象学和海洋学都非常重要[1]。GNSS-R(Global Navigation Satellite Systems Reflectometry)技术是目前海面测高中的新兴遥感技术,属于被动接收技术,通过接收经由反射面反射的反射信号与直射信号之间的差异进行物理量的反演。该技术在1993年,由Martin-Neira教授首次提出[2],并迅速在国内外成为研究热点。GNSS-R技术有众多优点,例如拥有大量信号源、不受天气(云、雾)影响、低成本实时监测等[3-4]。
机载GNSS-R较岸基GNSS-R相比,其优势在于其空间分辨率高、监测范围广,可对大范围的区域进行监测,同时机载测高已经成为了星载测高技术的预研技术,因此GNSS-R机载测高正在被得到广泛的研究。目前GNSS-R机载测高技术主要包括码测高[5-7]、载波相位测高[8-13]、干涉测高[14]、时延多普勒图(Delay-Doppler-Map,DDM)测高[15-16]及信噪比测高[17-18]等。国外团队对机载GNSS-R测高进行了相关研究,取得了一定的研究成果[19-20],而国内大部分测高研究大部分集中基于岸基开展的[17,21],关于机载GNSS-R海面测高方面的研究较少,缺少必要的实验成果及分析。
码测高技术是目前最常用的GNSS-R机载测高技术,相对于其他技术,具有实现方便,抗干扰能力强的特点,因此在GNSS-R移动平台的海面监测领域有着广泛的应用。本文在GNSS-R岸基码测高技术研究[22]的基础上,分析了2011年11月11日,CSICIEEC(Consejo Superior de Investigaciones Científicas(CSIC)—Institut d'Estudis Espacials de Catalunya(IEEC))在芬兰波罗的海进行的机载实验数据,在岸基反演的基础上,针对大气延迟、天线距离、海洋潮汐模型等进行修正,优化了GNSS-R机载海面测高模型,成功地反演了海面高度,证明了机载GNSS-R技术海面测高的可行性,在分析过程中,关于反射仰角的测高精度的影响做了定性的分析,得出了低反射仰角对测高结果精度产生较大影响的结论。
2 机载GNSS-R海面高度反演原理
2.1 GNSS-R码测高技术
码测高技术对直射信号的本地码进行适当延迟和多普勒频移补偿后,再生成反射信号[23],它通过反射信号与直射信号之间的路径延迟进行高度反演。GNSS-R码测高技术基本概念如图1所示,其中延迟距离为Dp。
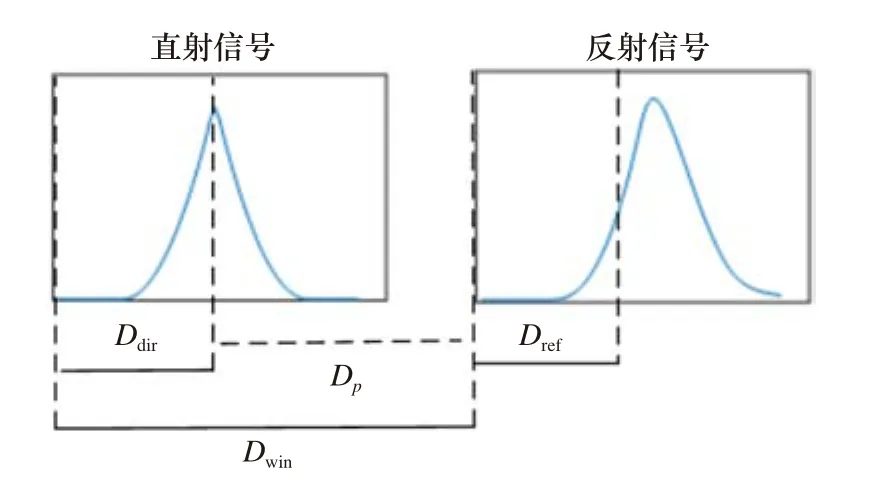
图1 GNSS-R码测高技术基本概念Fig.1 GNSS-R group delay altimetry basic concept
2.2 延迟路径模型
图1中的反射信号相对于直射信号的延迟路径ρ由下式给出,

式中,Dwin为直射信号开始窗口至反射信号开始窗口距离;Ddir为直射信号峰值位置;Dref为反射信号导数最大位置;Datm为大气延迟;Dins为反射天线和直射天线之间的距离。
通过对机载实验中使用反射信号峰值位置及导数最大位置反演出的结果进行对比,结果表明,在机载实验中,采用反射信号导数最大值位置时的误差比采用直射信号峰值位置时的误差小[19]。因此,本文中选用反射信号导数最大位置作为反射信号的延迟位置。
在机载测高模型中,将考虑到大气延迟的干扰。由于本次实验中飞机高度处于大约3 km的高度,所以不对电离层进行考虑,只考虑对流层延迟进行误差修正。本文中,大气层的延迟Datm使用下式计算[24],

式中,e为镜面反射点处仰角;Ha为飞机上方直射接收天线所在的高度。
与岸基GNSS-R反演测高不同的是,由于直射接收天线与反射接收天线分别位于飞机的上方与下方,直射天线与反射天线位置不在同一个水平面上,所以在进行伪距测量时,对两个天线之间的距离(Dins)进行误差修正。由于缺少机载平台的姿态角信息,本文只选取飞机直线飞行时的数据进行分析,删除了飞机转向时的实验数据,在计算过程中,忽略了姿态角对天线距离的影响。
2.3 机载测高模型
结合延迟路径模型,机载测高模型如图2所示。

图2 机载测高模型Fig.2 Airborne altimetry model
本文在岸基GNSS-R测高模型[22]的基础上,优化了机载GNSS-R测高模型,根据机载特点,增加了对大气延迟以及天线之间距离的修正,如图2中的Datm及Dins所示。同时,增加了对低仰角下反演结果的阈值判断。
根据公式(1)计算出延迟路径之后,通过下式得出GNSS-R反演的直射天线到海面的高度H-R,

通过接收机接收到的位置信息,可以得到飞机上方直射接收天线的高度(Ha)。通过计算飞机上方直射接收天线的高度(Ha)与GNSS-R反演的直射天线到海面的高度(H-R)之间的距离差,以及通过潮汐模型HOTM的修正,可以得到海面高度(Hsea),

3 实验介绍
3.1 实验环境介绍
本次实验数据为2011年11月11日,CSIC-IEEC在芬兰波罗的海进行的机载实验数据。本次机载实验采用接收机GOLD-RTR(GPS Open Loop Differential Real-Time Receiver)进行数据收集,它的采样率为1 ms。其中,直射信号接收天线位于飞机上方,反射信号接收天线位于飞机下方,天线增益均为15 -dBi。其中在飞机上方,安装了Novatel接收机用于提供时间、位置等信息。
3.2 实验数据介绍
本文采用了两个时间段的数据进行了分析,同时选取镜面反射点仰角大于75°的时间段作为高仰角,小于60°的时间段作为低仰角进行分析。
第一个实验数据时间段全球定位系统(Global Positioning System,GPS)时间为 452 008~453 350 s,飞机的轨迹图如图3a所示。高仰角数据选取伪随机噪声码(Pseudo Random Noise code,PRN)12 号卫星,镜面反射点仰角为80.51°~84.29°;低仰角数据选取PRN25号卫星,镜面反射点仰角为46.60°~56.78°。为了避免飞机转向所造成的影响,去除了GPS时间452 608~452 750 s的转向时间,只选取飞机沿直线飞行时的数据作为本次实验分析数据,此时间段仰角变化如图4a所示。
第二个实验数据时间段GPS时间为456 700~458 099 s,飞机的轨迹图如图3b所示。高仰角数据选取PRN25号卫星,镜面反射点仰角为76.82°~79.93°;低仰角数据选取PRN12号卫星,镜面反射点仰角为47.30°~58.30°。为了避免飞机转向所造成的影响,去除了GPS时间457 300~457 499 s的转向时间,选取飞机沿直线飞行时的数据作为本次实验分析数据,此时间段仰角变化如图4b所示。
两个实验数据总结如表1所示。
3.3 模型验证数据介绍
在进行机载测高分析时,GNSS-R获取的是瞬时海面高度,因此需要消除波浪影响,进行潮位改正,获得海面高度(Hsea)。本文选取丹麦技术大学(Technical University of Denmark,DTU10)全球海洋潮汐模型(Global Ocean Tide Model)作为本次实验的潮汐模型HOTM[25]。
同时,本文选取DTU10海洋平均海面高度[26-28]作为本次实验的参考值HDTU。公式(4)求得的结果(Hsea)与DTU10海洋平均海面高度HDTU进行对比,可以验证GNSS-R反演的海面高度结果(Hsea)的精度。
4 反演结果分析
4.1 镜面反射点

图3 飞行轨迹图Fig.3 Flight trajectory

图4 PRN12号卫星(红)及PRN25号卫星(蓝)仰角变化Fig.4 Variation of PRN12 satellite (red) and PRN25 satellite (blue) elevation angle
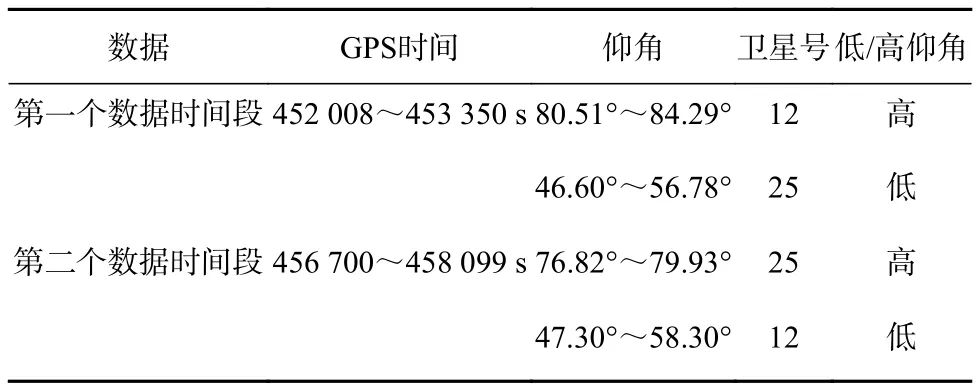
表1 实验数据结果Table 1 Result of experimental data
第一段实验时间期间,PRN12和PRN25的镜面反射点轨迹如图5a所示,第二段实验时间期间,PRN12和PRN25镜面反射点轨迹如图5b所示。从图5可知,所有的反射信号数据都落在海面范围内。
4.2 海面高度反演
以GPS时间452 008 s,PRN12的数据分析为例。首先,获取直射信号与反射信号原始I/Q波形之后,对1 s的数据长度进行筛选。本次实验中数据采样频率为1 kHz,基于大量数据分析所得到的结论,为了考虑数据的完整性,选取1 s数据包含大于800个原始数据进行分析,这个范围可以剔除掉由于波形异常从而导致结果不准确的情况。在选取数据之后,对它们进行1 ms相干累加及1 s非相干累加操作。至此,得出1 s的直射/反射信号功率波形,接着对直射/反射信号波形分别计算直射信号峰值位置Ddir及反射信号导数最大位置Dref。此时通过1 ms相干累加及1 s非相干累加操作以后的直射信号/反射信号图如图1中的直射信号及反射信号所示。
通过了误差模型,以及已知的设置,利用公式(4),得到了该时刻通过反射信号反演的海面高度是18.04 m,该时刻的海面高度值是16.79 m。
4.3 第一段实验结果
第一段实验时间期间,在高仰角情况下,即PRN12号卫星作为观测卫星,通过反射信号反演的海面高度如图6a所示。在低仰角情况下,即PRN25号卫星作为观测卫星,通过反射信号反演的海面高度如图6b所示。得出1 s结果之后,对结果进行20 s平均处理。进行平均操作之后的结果如图7所示,图7a是20 s平均后(PRN12号卫星)反演的高度图,图7b是20 s平均后(PRN25号卫星)反演的高度图。
4.4 第二段实验结果
第二段实验时间期间,发现在低仰角的情况下,GPS时间段456 700~457 299 s(PRN12号卫星)期间,反演的海面高度出现几百米误差的异常值,异常反演海面高度如图8a所示。经过分析,发现在这个时间段PRN12号卫星接收到的直射信号异常,导致所得的波形无法计算出准确的结果。
图9a是直射信号正常功率波形,图9b是GPS时刻456 793 s的直射信号功率波形,通过比较图9a与图9b的波形,发现在图9b时刻的直射功率波形异常,推测在低仰角时,直射天线可能受到了机身的干扰,导致直射信号异常。实验采用的接收机的直射信号采样总共有64个相关器,采样步长为15 m,通常情况下直射信号的相关峰值位置在第34个相关器正负1个步长距离间波动,直射信号的峰值位置范围(Ddir)为480~510 m。所以,本文在低仰角数据反演前,对直射信号的峰值位置范围进行阈值判断(480<Ddir<510),不满足条件的数据将不参与高度反演计算,经过筛选之后的海面高度如图8b所示,与图8a比较后可以发现,经过筛选后,异常值得到了有效的删除,反演的可靠性得到了提高。
在高仰角情况下,即PRN25号卫星作为观测卫星,通过反射信号反演的海面高度如图10a所示。在低仰角情况下,即PRN12号卫星作为观测卫星,经过对异常数据删除之后的反演高度如图10b所示。在得出1 s结果之后,对数据进行20 s平均处理。进行平均操作之后的结果如图11所示。图11a是20 s平均后(PRN25号卫星)反演的高度图,图11b是20 s平均后(PRN12号卫星)反演的高度图。
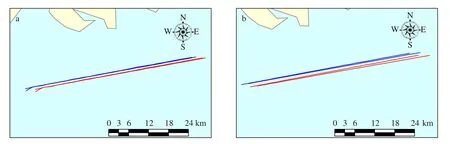
图5 PRN12(红色)和PRN25(蓝色)卫星镜面反射点轨迹Fig.5 PRN12 (red) and PRN25 (blue) satallite specular reflection point trace

图6 第一个数据时间段1 s高度对比Fig.6 The first data period 1 s height comparison
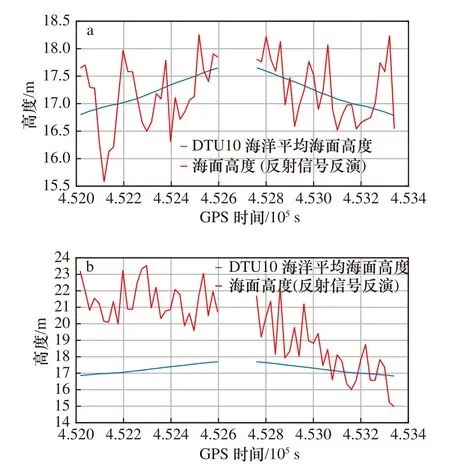
图7 第一个数据时间段20 s平均后高度对比Fig.7 The first data period after 20 s average height comparison
4.5 数据分析总结
本文将以偏差(Bias)、平均绝对误差(Mean Absolute Error, MAE)和平均绝对误差的标准偏差(Standard Deviations, STD)作为实验的评估标准。三者的计算公式如下式所示,

图8 反演高度异常值(a)及筛选过后高度值(b)Fig.8 Inversion of height anomaly values(a)and filtered height values(b)
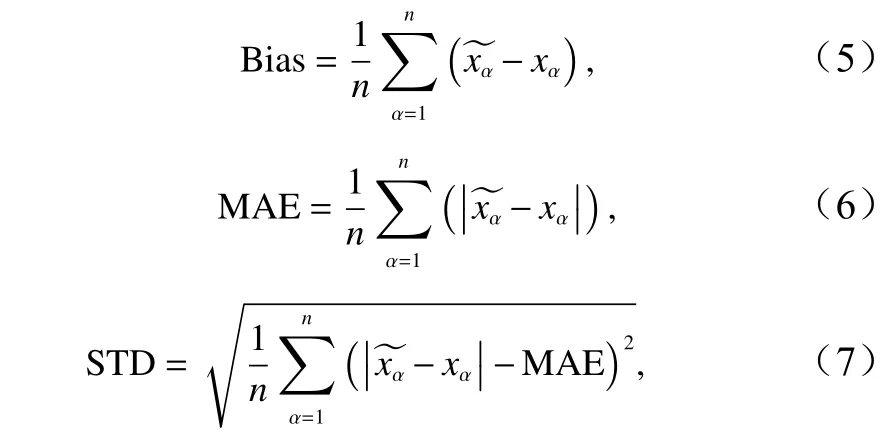
表2为1 s平均,10 s平均,15 s平均和20 s平均的实验结果。通过表2中的结果显示,在低仰角情况下,由于接收到的信号会受到干扰,所以反演的海面高度结果比较不稳定,在经过异常值处理之后,仍然与参考值相比普遍偏大,且离散度高;高仰角下受到的干扰则较小,通过反射信号反演的海面高度与参考值相比误差较小且离散较低,通过一定时间的平均之后可以消除波浪的影响,提高精度,其中20 s平均的结果精度最高,可以达到亚米级的精度,特别是第一阶段的数据,由于高仰角在80°以上,甚至达到了厘米级的精度,证明了GNSS-R机载海面测高的可行性。
5 结论
本文在岸基GNSS-R海面测高基础上,建立了机载测高模型,依据码延迟测高原理,通过分析2011年11月11日的机载数据,分别对两个时间段的试验数据段进行分析,对高仰角(75°以上)和低仰角(60°以下)的结果进行了对比分析。

图9 直射信号正常功率波形(a)及异常功率波形(b)Fig.9 Direct signal normal(a)and abnormal power waveform(b)
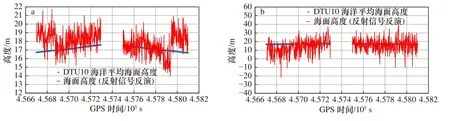
图10 第二个数据时间段1 s高度对比Fig.10 The second data period 1 s height comparison
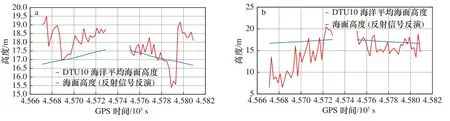
图11 第二个数据时间段20 s平均后高度对比Fig.11 The second data period after 20 s average height comparison
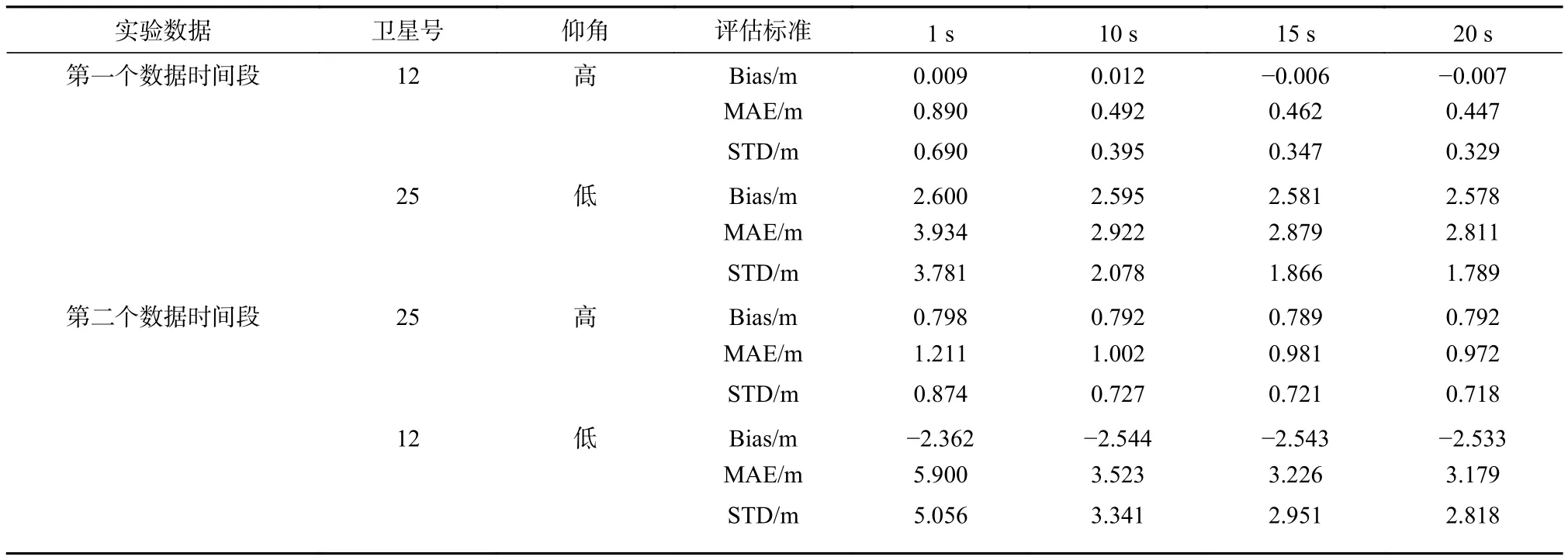
表2 实验数据结果Table 2 Result of experimental data
经过数据分析,证明了GNSS-R机载技术可以实现高时间分辨率以及较大范围的海面高度反演,并且通过采用20 s的数据平均方法以后,可以有效地增加反演精度,达到亚米级精度。
通过分析同一时刻下,不同反射仰角的反射信号反演的海面高度的结果分析,高仰角的反演结果更加稳定、准确。基于实验结果,进行机载测高反演时,选取仰角大于75°的数据可以减少噪声干扰以及机身对直射信号的干扰,得到更高精度的反演结果。同时在低仰角下对直射信号异常现象进行了判断,对直射信号原始数据进行筛选后,提高了低仰角下反演结果的可靠性。本论文中所提出的GNSS-R海面测高模型也可以作为星载测高的理论基础。
致谢:感谢CSIC-IEEC提供本次论文的分析数据,感谢北京航空航天大学杨东凯教授、CSIC-IEEC的李伟强博士、上海航天电子技术研究所周勃高级工程师、秦瑾工程师在GNSS-R机载数据分析方法上提供的建议。
