自定位移动三轮全向机器人的设计开发
2020-05-22昝立宇苟江纯曾晓玉沈发林程渭东徐慧平
昝立宇 苟江纯 曾晓玉 沈发林 程渭东 徐慧平
(1.成都理工大学核技术与自动化工程学院 四川成都 610059;2.成都中医药大学外语学院 四川成都610075;3.四川福祥建设工程有限公司 四川眉山 620360)
一、三轮全向机器人的总体设计思路
机器人作为一个集成化的复杂整体,为便于检修与维护,设计开发采用了模块化的思想。[1]我们采用STM32F407IGT6工控板为主控制器,来进行定位数据分析与解算、无线数据的收发和基于CAN总线的电机驱动控制等操作。定位模块对自身位置信息进行自校准,把相关数据实时送至单片机内部的特定储存区,等待控制器取用。主控制器还通过CAN总线传输方式,驱动控制三个电机。考虑到机器人的人机交互性,定位信息会同步更新于客户端无线路由器下的串口屏上,也可通过串口屏手动设置目标位置。同时,为了控制的稳定可靠,工控板与各模拟量输入端口均有相关屏蔽措施,在各个主要模块上也加有过流保护装置。机器人控制系统总体组成如图1所示:

图1 控制系统组成图
二、三轮全向机器人的硬件设计
(一)机械装置设计
机器人采用等边三角形形状设计,在底部铝板每条边的中心点各安装一个全向轮,使轮子之间互相间隔120°,选用由RoboModule电机驱动调节器控制的1:20减速比无刷电机,构成硬件驱动部分。机器人中间安置定位模块,由模块中的正交码盘进行坐标的校准,并在周围安置三芯屏蔽线以隔断电磁干扰信号。团队采用24V/20AH或15AH磷酸铁锂电池,为机器人提供稳定电能,再由单极式可逆PWM波变换器构成的H桥电路与24V滤波电路等构成驱动电路,组成自定位硬件部分。
(二)运动模型构建
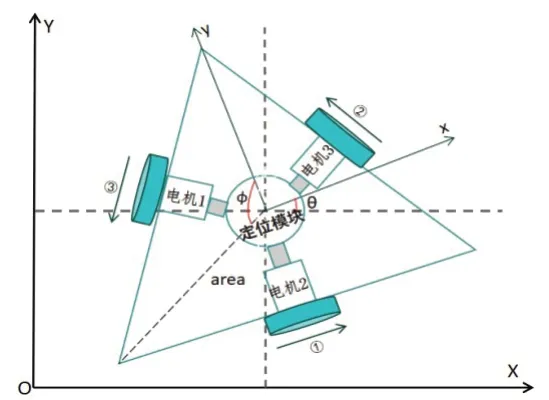
图2 机器人位姿分析图
由此,我们在空间中定义绝对坐标系(即二维垂直坐标系)XOY,设机器人坐标系为xoy,再令机器人在绝对坐标系中的姿态角为θ,即其自身坐标系相对于绝对坐标系的旋转角度,可搭建起机器人的简易模型并置于绝对坐标系中,构建起机器人位姿分析图如图2所示。考虑到高精度无刷电机单线串联或集散式并联供电工作时会产生较大电流负荷与机械抖动,我们便采用了多线屏蔽下的区位化供电方案,φ即为机器人分区控制的区位角,令φ=2/3π,area为分区边缘长度。设Vx、Vy、W 为机器人在绝对坐标系下的速度,W为机器人自转的角速度,vs、vy、w为机器人在自身坐标系中的速度。则可根据位姿分析图得到其两系三相速度的关系表达式,用矩阵排列表示并记作式①。随后,将式①中机器人自身坐标系下的速度分解到轮子方向,规定的轮子正方向如箭头所示,记各轮线速度为v1、v2、v3。此时可得新的矩阵表达式,记作式②。把式②代入式①之中,可近似理解为做矩阵的约项乘法,再进行化解之后可得下式:

此表达式便实现了绝对坐标系下两轴速度分量及自转速度与机器人各轮线速度的转化,根据此思路可将场地坐标系的移动速度转化为相应轮子的移动速度,再通过控制算法的编写即可实现机器人往任意方向的移动控制。[2]
三、三轮全向机器人的软件设计
我们对运动控制系统进行软件编程设计,整个编程和调试工作都是在MDK 5集成开发环境与艾克申导航模块开发公司提供的统一集成开发环境下完成。软件代码主要包括运动控制部分代码及定位解算相关代码。运动控制部分流程图如图3所示,其中系统初始状态包括定位模块参数的初始化,中断指令处理的是定位码盘发布的控制目标位置的解析。定位解算相关代码设计完成后,还可通过EKshen-form软件进行人机界面交互,使得我们可以更加稳定、经济、高效地实现对机器人位置状态的实时监测与运动状态的精确控制。[3]
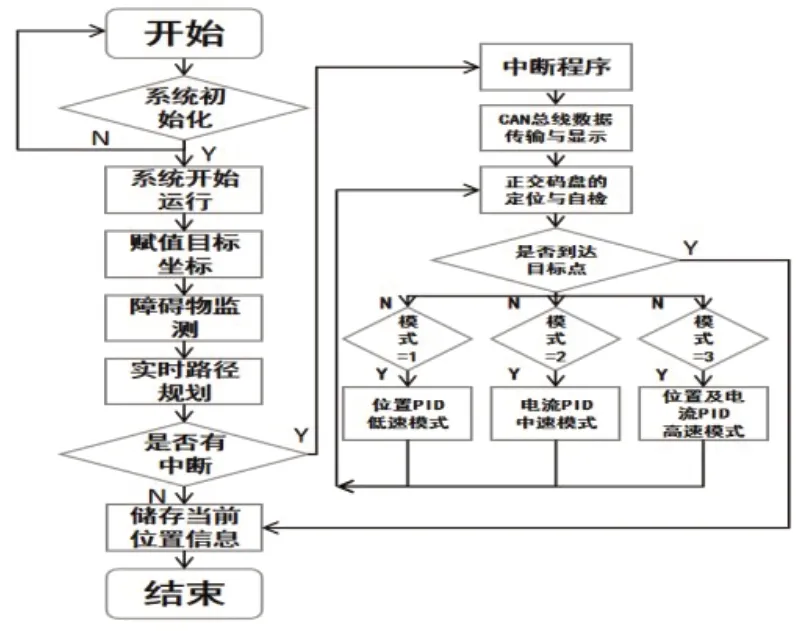
图3 控制程序流程图
四、实验与分析
机器人底盘驱动轮半径为82mm,三个全向轮中分面距离机器人坐标系中心距离分别是 438.4mm、329.5mm、333.6mm,底盘总重10.2kg,测试时在长15m、宽15m的区域内按定位沿直线或者曲线运动。其无刷电机工作由相应PID模式进行限制,分为:位置PID-低速、电流PID-中速、位置及电流PID-高速。经相关实验分析,三环PID控制时电机支流峰值电流最大不可超8.5A,且预定转差率与视在误差均需符合实际应用要求,结合上述需求,选择出三环PID的最终调节数据。
五、结束语
本文从三轮全向机器人设计的总体理念出发,论述了机器人硬件构成的合理性,推导了其运动方程,构建起控制系统的初步框架。随后,在软件设计部分陈列了程序的整体设计思路,并给出工作流程图,具有相当高的科学合理性。同时,团队成员也在搭建的三轮全向机器人样机上,对该运动控制系统进行了实际测试,得到了符合机器人自身机械特性的控制数据。该自定位移动三轮全向机器人已参加2019年机器人大赛,并在赛场上有不错的运动控制效果,满足了比赛的自定位、运动需求,具备良好的稳定性和控制精度。
