基于STM32的模拟工业自动化智能搬运小车设计
2020-05-21周磊磊余家天一郭婋赫周丽蓉谢光前
周磊磊 余家天一 郭婋赫 周丽蓉 谢光前

摘要:本文研究的智能小车又叫轮式机器人,模拟工业自动化过程中自动化物流系统的作业过程。选用稳定的三轮结构车体,通过差速度,实现左转右转各种角度。采用STM32芯片作为嵌入式控制中心的核心,智能搬运小车系统由嵌入式STM32最小系统板结合稳压电源模块、电机驱动模块、灰度传感器模块、颜色识别模块等组成。
关键词:智能小车;自动化;STM32;颜色识别;嵌入式
中图分类号:G642.0 文献标识码:A
文章编号:1009-3044(2020)09-0257-03
1 引言
随着工业4.0的发展,越来越多的工业工厂开始转向自动化和智能化的方向。工业4.0是一个利用信息技术促进工业转型的时代,包括从集中控制到分散强化控制的基本模式转变。目的是为个性化和数字化产品和服务创建方便快捷的生产形式。在这种形式下,以前的工业界限将消散,各类新的模式和合作方式将出现。缔造新价值的过程正逐渐变化,产业链中的各个部分将会重组。工业4.0是一个工业的技术改造和工业改造。工业4.0所讲到的智能制造面向商品的整个生命周期,在无处不在的传感条件下完成信息化制造。经过感知、人机交互、决策、实行和应答,实现智能产品生产、制造过程和工厂智能化管理。它是信息技术与制造业的深度集成和集成技术[1-4]。
最近几年,国内先后出现了一系列机器人竞赛,机器人比赛一方面能够推动技术进步,很多比赛项目都是基于一些实际社会生产中的问题,以中国工程机器人大赛的搬运组比赛而言,比赛的任务是将不同颜色的物料送到对应颜色的位置,模拟了工业自动化生产中物流运输。现如今,很多工业正向自动化、智能化转型,提高生产效率。另一方面机器人比赛促进学校教育,想要设计一辆符合比赛要求的轮式小车,需要多方面的知识,以及一定的实践经验。通过参加比赛,将所学的知识应用于实际,增加动手能力,逻辑分析能力,进一步巩固学到知识。
2 智能小车硬件系统结构[5]
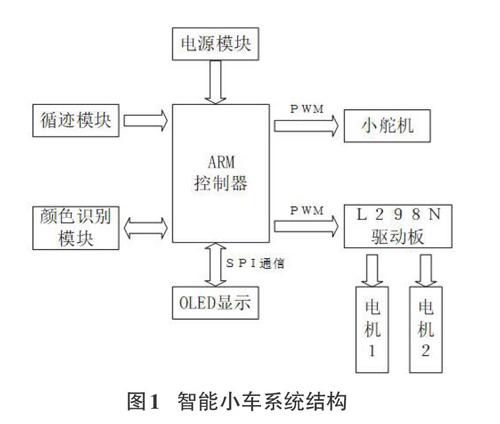
智能小车系统结构如图l所示,包含核心系统板、电源模块、循迹模块、颜色识别模块、电机驱动模块、OLED显示模块等部分。在小车搬运过程中,电源模块给核心板、循迹模块等各个模块供电,循迹模块和颜色识别模块将采集到的数据发送给ARM控制器,控制器负责多采集到的数据进行处理,并且控制舵机和两个电机,将颜色识别的结果显示在OLED屏上。
2.1 核心板设计
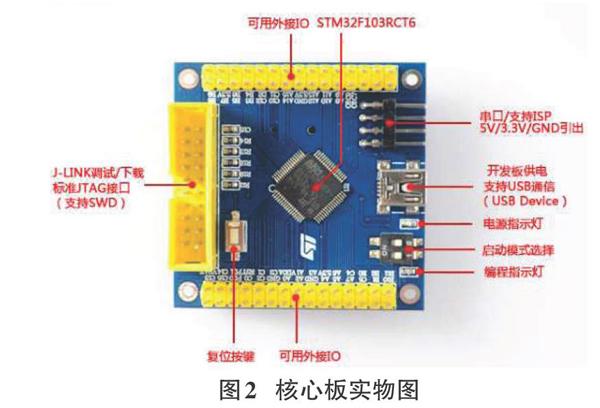
微处理器对于整个硬件系统而言,是最核心的,影响着其他硬件设备的选择。随着技术不断进步,微处理器的性能越来越出色。经比较发现ARM处理器比C51单片机和Arduino拥有更加丰富的资源,并且ARM处理器的功耗更低,价格方面也不贵,性价比很高。ARM拥有了16位的Thumb指令,并且ARM-般都是32位处理器,处理速度很快。ARM还集成了丰富的片内外设资源,可以利用自身资源而不必增加外围器件就可以实现控制所需求的功能。另外,以ARM作为微处理器,可以移植一些操作系统,使得智能小车更加智能高效,所以本课题选用ARM处理器。如图2是核心板的实物图,选用的ARM芯片是STM32F103RCT6,它是STM32F103系列中高性能、高配置的Cortex-M3内核32位处理器。
2.2 电源模块设计
此模块以4个LDO(低压差线性稳压器)为主芯片,实现6V - 12V的降压,输出电压有:VCC、5V、3V3。5V和3V3 -共17组,如果不够用,还可以使用扩展端口增加输出端口。此模块集成防反接电路,避免用户接反输入电源,损坏模块。如图3所示,5V和3V3都有两个通道,两个通道的额定电流不同,一个通道是SA,另一个是IA。当使用大电流的设备时,就可以选择接在5A的通道上,更好地驱动设备。
由于该电源模块上引脚比较多,对于智能小车来说非常合适,智能小车上传感器都需要供电,并且各类传感器、电机和核心板的供电电压都不同,有了这块电源板,供电就非常方便,不需要使用多个单独的降压模块来分别供电。在设计电路时,考虑到对电源板的保护,设计了防反接保护、芯片热保护、短路保护等措施。
2.3 循迹模块设计
选择的灰度传感器是数字传感器,如图4所示,有一只发光二极管和一只光敏二极管,安装在同一面上,一共是8路灰度传感器。灰度传感器利用不同颜色的检测面对光的反射程度不同,光敏电阻对不同检测面返回的光其阻值也不同的原理进行颜色深浅检测[6]。在有效的检测距离内(理论上距离可以无限远,实际受外界光源的影响,最佳距离为15mm至50mm,如果距离过高的话,需要进行遮光),发光二极管发出白光或红光(这个主要和场地的反光能力有关,一般是反光能力强的场地用红光的,反光能力差的用白光。这个主要视场地反光而定),照射在检测面上,检测面反射部分光线,光敏二极管检测此光线的强度并将其转换为机器人可以识别的信号。数字量灰度传感器的返回值是高低电平(1和0),主要是把模拟信号经过LM339或LM393这两个电压比较器把电信号分为高电平和低电平。而且可以通过电位器进行调节这个高低电平的分界线。也就是常说的调节对光的灵敏度。
2.4 颜色识别模块设计[7,8]
TCS3200颜色传感器是一款全彩的颜色检测器,如图5所示,该模块包括了一块TAOS TCS3200RGB感应芯片和4个白光LED灯,TCS3200能在一定的范围内检测和测量几乎所有的可见光。它适合于色度计测量应用领域。比如彩色打印、医疗诊断、计算机彩色监视器校准以及油漆、纺织品、化妆品和印刷材料的过程控制。SC3200具有很多特点,首先是可将高分辨率光强转换到方波的形式输出,可编程引脚可以控制多种比例的频率输出,可与微处理器直接相连,单独供电,具有断电复位的功能。并且稳定性较好,误差较小,具有稳定的温度系数,可以直接输出數字信号不需A/D转换器,使电路设计变得简单[8]。
3 智能小车软件设计
软件设计方面,首先要进行开发平台的安装,安装芯片对应的库,配置好编程所需的开发环境,然后是模块化的编程,按照比赛任务,完成物块的搬运。图6是整个搬运过程的结构图,小车在接收到开始指令后,根据灰度传感器返回的值,判断路线,自主循迹,当循迹到达指定位置后,开始识别物块的颜色,并且用钩爪抓取物块,根据返回的颜色值,确定物块的颜色,选择合适的路线,将物块送到指定位置。最后判断物块是否搬运完成,若还有物块未搬运,重复上面的操作,但是由于物块的摆放位置不同,所以在抓取下一个物块时,要判断当前的位置,选择返回的路线,才能完成所有物块的搬运,搬运完成或后,返回起点。
4 实验与分析
经过测试,智能小车的各个模块运行正常,电机能够实现正反转和调速,小车在场地上循迹正常,OLED屏能够显示汉字和数字等,颜色识别也没有问题,小车的钩爪也能抓取物块。智能搬运小车的测试过程如图7,在图7中(a)和(b)是识别绿色物块的过程,在OLED屏上显示颜色值和判别的颜色;(c)是小车前往F处去抓取物块,(d)是小车完成所有搬运任务后,回归起点。
5 结论
本文通过对国内外搬运机器人发展现状的研究分析,查阅各种传感器的相关资料,完成各个模块的设计,学到了机器人软件程序设计方面模块化编程的思想。机器人设计是需要软硬件很好的配合,才能发挥更好的性能。团队成员参加了2019年中国工程机器人大赛搬运组比赛获得一等奖、二等奖、三等奖、优胜奖各一项。
参考文献:
[1]张曙.工业4.0和智能制造[J].机械设计与制造工程,2014,43(8):1-5.
[2]王喜文.工业4.0带来机器人的进化[J].物联网技术,2015,5(10):2.
[3]雷光临,李俊.基于物联网技术的智慧物流研究[J].物流技术,2012,31(15):393-394,429.
[4]金亚萍.自动导引车关键技术现状及发展趋势[J].物流技术与应用,2015,20(11):96-98.
[5]周文軍,吴有明.基于AGV和工业机器人的智能搬运小车的研究[J].装备制造技术,2016(11):96-98,114.
[6]向楠,陆会娥.物流自动化智能可避障搬运小车系统设计[J].广东石油化工学院学报,2017,27(4):30-33.
[7]卢川英,于浩成,孙敬辉,等.基于TCS:30传感器的颜色检测系统[J].吉林大学学报(信息科学版),2008.26(6):621-626.
[8]任天威.基于stm32微处理器的颜色采集与分析[D].哈尔滨:黑龙江大学,2015.
【通联编辑:梁书】
基金项目:江苏省高校自然科学基金(18KJB520004)
作者简介:周磊磊(1996-),男,安徽铜陵人,本科,主要从事电气工程及其自动化方面的学习和研究;余家天一(1999-),男,江苏徐州人,本科,主要从事物联网工程方面的学习和研究;郭婋赫(1999-),男,江苏徐州人,本科,主要从事物联网工程方面的学习和研究;周丽蓉(1998-),女,江苏泰州人,本科,主要从事物联网工程方面的学习和研究;谢光前(1977-),男,安徽安庆人,副教授,博士,主要从事无线传感网方面的教学和研究。
