机械臂初始位置误差的容错运动规划
2020-05-21李克讷杨津徐剑琴罗家维
李克讷 杨津 徐剑琴 罗家维

摘 要:针对机械臂在执行任务过程中末端执行器的实际与期望的初始位置存在误差的问题,提出一种基于二次型规划的容错型运动规划方案,用于减小机械臂在执行轨迹跟踪任务时初始位置误差对任务执行精度的影响。采用神经动力学方法,把位置误差转换为机械臂末端运动速度,并在速度层上对机械臂进行建模。使用一种基于线性变分不等式的原对偶神经网络求解器,对提出的二次型规划方案进行实时求解。平面二连杆机械臂的仿真结果证明了初始位置误差呈指数收敛趋于0,验证了该容错方案的有效性。
关键词:运动规划;二次型规划;初始位置误差;神经网络
DOI:10.15938/j.jhust.2020.01.014
中图分类号: TP24
文献标志码: A
文章编号: 1007-2683(2020)01-0093-07
Abstract:In the robotic application, the error would exist between the actual and desired initial positions of the end-effectorIn this paper, a fault-tolerant motion planning scheme was proposed based on quadratic programming to reduce the initial position error and improve the tracking accuracy during the end-effector executing the taskBy using the neural-dynamics method, an error-eliminating velocity was designed based on the real-time position error, and was incorporated into the end-effector velocity together with the task desired velocityFurthermore,a primal-dual neural network solver based on linear variational inequalities was used to solve the proposed quadratic programming scheme in real-time-TheMATLAB simulationresults of a two-degree-of-freedom planar manipulator demonstratethat the initial position error is exponential convergent to 0, and the fault-tolerance scheme is effective-Keywords:motion planning; quadratic programming; initial position error; neural network
0 前 言
机械臂由于其工作效率高、重复精度好、可以代替人类在危险环境下工作等特点,被广泛应用于农业、制造业、服务业等多个领域[1-5]。机械臂的运动学解析问题是机器人研究中最基本的问题之一,在近几十年中得到了国内外学者的广泛关注[6]。基于雅克比矩阵求逆的方法经常被用来规划机械臂的运动,这一方法虽然能够进行实时计算,但是该方法需要对矩阵进行求逆运算,计算较为复杂[5-8]。
由于机械臂工作的环境比较复杂,在实际应用中,可能会由于温度变化、D-H参数误差、传感器误差等因素的影响,导致机械臂在进行初始状态调整时,末端执行器的初始位置与在执行轨迹跟踪任务时期望的初始位置之间存在误差[9,10]。此外,这一误差会随着机械臂的长期工作和磨损而逐渐增大[11]。如果没有及时对该误差进行有效的控制和减小,那么该误差会存在于整个任务的执行过程中,影响任务的执行精度。因此,如何有效减小初始位置误差是机械臂进行运动规划中需要考虑的重要问题。就作者所知,目前对于这一问题的研究较少。有学者提出了一种可用来进行机器人位姿误差补偿的差值算法,但该方法计算较为繁琐且不能实现误差的在线补偿[12]。文献[13]中提出利用激光跟踪仪测量机器人位姿,并构建闭环控制系统对机器人位姿误差进行在线补偿,该方法需要进行多次在线补偿,且能达到的精度不高。还有学者利用微小位移合成法建立机器人的位置误差模型,提出利用雅克比矩阵将末端运动轨迹误差转换为关节角修正量的算法,通过优化关节转角来减小路径跟踪误差[14]。该方法虽然简单且易于理解,但是需要进行矩阵求逆运算,计算复杂,同时难以达到很好的末端作业精度。
本文就提出的机械臂初始位置误差这一问题,大致分为以下几部分来探讨其容错规划方案。首先,基于神经动力学方法把位置误差转换为机械臂末端运动速度,对容错方案进行相应的数学描述。第二,建立基于二次型的解析方案,在速度层上对机械臂的逆运动学问题进行求解。第三,通过构造基于线性变分不等式的原对偶神经网络对上述的二次型解析方案进行实时求解。最后以二连杆机械臂为例对该方案进行MATLAB仿真,探讨该容错方案对于消除初始位置误差的可行性和有效性。
1 初始位置误差的容错方案描述
4 结 论
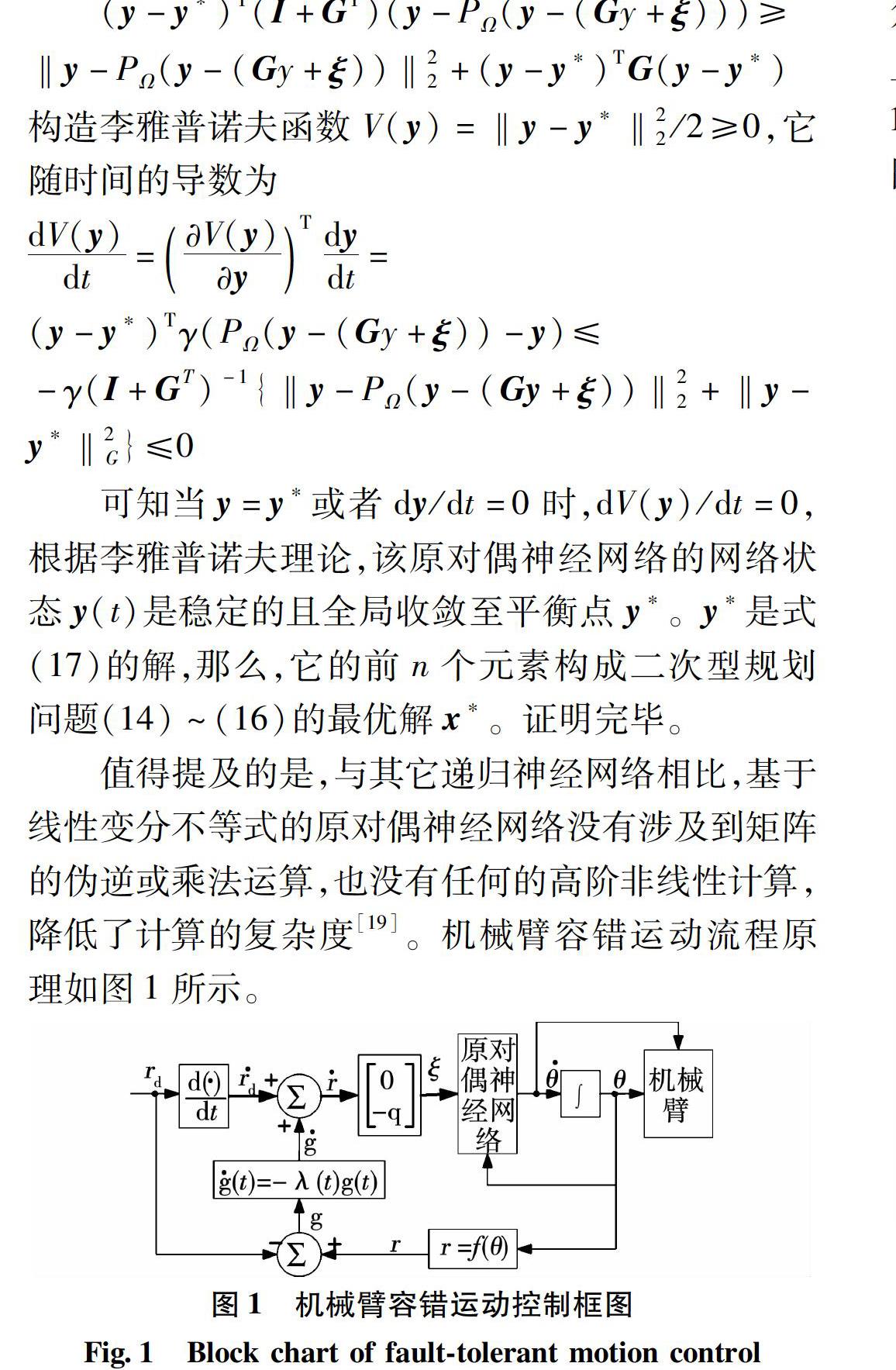
本文针对二连杆机械臂在执行轨迹跟踪任务时可能出现的初始位置误差这一问题,提出了一种基于二次型规划的容错解析方案,该方案利用基于线性变分不等式的原对偶神经网络求解器进行求解。除此之外,该方案中没有进行矩阵的求逆运算,降低了计算的难度,同时原对偶神经网络也能够满足实時求解的要求。仿真结果表明,机械臂在存在初始位置误差的情况下也能够很好地完成轨迹跟踪任务。在往后的研究中,可以将该方法扩展到冗余度机械臂执行多任务的运动规划中,进一步提高算法的有效性和实用性。
参 考 文 献:
[1] 马晓敏,刘丁,辛菁,等.移动机器人生物启发式变结构轨迹跟踪控制[J].电机与控制学报,2018,22(7):97.MA Xiaomin, LIU Ding, XIN Jing, et al. Biologically Inspired Variable Structure Trajectory Tracking Control for a Mobile Robot[J]. Electric Machines and Control, 2018, 22(7): 97.
[2] GOSSELIN C, SCHREIBER L T. Kinematically Redundant Spatial Parallel Mechanisms for Singularity Avoidance and Large Orientational Workspace[J]. IEEE Transactions on Robotics, 2017, 32(2): 286.
[3] 許家忠, 王温强, 谢文博,等. 故障机械臂模型重构后的轨迹规划与实验分析[J]. 哈尔滨理工大学学报, 2016, 21(2): 1.XU Jiazong, WANG Wenqiang, XIE Wenbo, et al. The Trajectory Planning and Experimental Analysis of Fault Mechanical Arm Based on Model Reconstructed[J]. Journal of Harbin University of Science and Technology, 2016, 21(2): 1.
[4] 吴海彬,李实懿,吴国魁.基于动量偏差观测器的机器人碰撞检测算法[J].电机与控制学报,2015,19(5):97.WU Haibin, LI Shiyi, WU Guokui. Collision Detection Algorithm for Robot Manipulator Based on Momentum Deviation Observer[J]. Electric Machines and Control, 2015,19(5): 97.
[5] WAN J, WU H T, MA R, et al. A Study on Avoiding Joint Limits for Inverse Kinematics of Redundant Manipulators Using Improved Clamping Weighted Least-Norm Method[J]. Journal of Mechanical Science & Technology, 2018, 32(3): 1367.
[6] LIAO B, LIU W. Pseudoinverse-Type Bi-criteria Minimization Scheme for Redundancy Resolution of Robot Manipulators[J]. Robotica, 2015, 33(10): 2100.
[7] HUANG S, PENG Y, WEI W, et al. Clamping Weighted Least-Norm Method for the Manipulator Kinematic Control with Constraints[J]. International Journal of Control, 2016, 89(11): 2240.
[8] PENG C, JI X, WEI W. A Unified Weighted Least Norm Method for Redundant Manipulator Control[J]. International Journal of Advanced Robotic Systems, 2016, 13: 1.
[9] MOHAN S. Error Analysis and Control Scheme for the Error Correction in Trajectory-Tracking of a Planar 2PRP-PPR Parallel Manipulator[J]. Mechatronics, 2017, 46: 70.
[10]张秀珩, 柳洪义, 巴鹏. 基于全微分模型的打磨机械臂静态误差分析[J]. 机床与液压, 2016, 44(15): 1.ZHANG Xiuheng, LIU Hongyi, BA Peng. Static Error Analysis of Grinding Manipulator Based on Total Differential Model[J]. Machine Tool & Hydraulics, 2016, 44(15): 1.
[11]戴厚德,曾现萍,游鸿修,等.基于光学运动跟踪系统的机器人末端位姿测量与误差补偿[J].机器人, 2019, 41(2): 206.DAI Houde, ZENG Xianping, YOU Hongxiu, et al. PoseMeasurement and Error Compensation of the Robot End-Effector Based on an Optical Tracking System[J]. Robot,2019, 41(2): 206.
[12]陈宵燕, 张秋菊, 孙沂琳,等. 工业机器人位姿误差空间IDSW插值补偿方法研究[J]. 机械科学与技术, 2017, 36(3): 378.CHEN Xiaoyan, ZHANG Qiuju, SUN Yilin, et al. Space IDSW Interpolation Compensation Method of Position and Orientation Error of Industrial Robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2017,36(3): 378.
[13]史晓佳, 张福民, 曲兴华,等. KUKA工业机器人位姿测量与在线误差补偿[J]. 机械工程学报, 2017, 53(8): 1.
SHI Xiaojia, ZHANG Fumin, QU Xinghua, et al. Position and Attitude Measurement and Online Errors Compensation for KUKA Industrial Robots[J]. Journal of Mechanical Engineering, 2017,53(8): 1.
[14]张绍春,张明路,吕晓玲,等.5R串联机器人的静态误差分析及优化方法[J].机械设计与制造,2018(6):250.ZHANG Shaochun, ZHANG Minglu, LV Xiaoling, et al. Analysis and Optimization of the Static Error on 5R Serial Robot[J]. Machinery Design & Manufacture, 2018(6): 250.
[15]XIAO L, ZHANG Z, ZHANG Z, et al. Design, Verification and Robotic Application of a Novel Recurrent Neural Network for Computing Dynamic Sylvester Equation[J]. Neural Networks, 2018, 105: 185.
[16]LI K, ZHAGN Y. State Adjustment of Redundant Robot Manipulator Based on Quadratic Programming[J]. Robotica, 2012, 30(3): 477.
[17]张雨浓, 易称福, 马伟木. 实时求解线性规划问题的原对偶神经网络[J]. 运筹学学报. 2010, 14(3): 1.ZHANG Yunong, YI Chengfu, MA Weimu. On a Primal-Dual Neural Network for Online Solution of Linear Programming[J]. Operations Research Transactions, 2010,14(3): 1.
[18]LI S, ZHOU M, LUO X. Modified Primal-Dual Neural Networks for Motion Control of Redundant Manipulators With Dynamic Rejection of Harmonic Noises[J]. IEEE Transactions on Neural Networks & Learning Systems, 2018, 29(10): 4791.
[19]ZHAGN Y. On the LVI-Based Primal-Dual Neural Network for Solving Online Linear and Quadratic Programming Problems[C]// American Control Conference. IEEE, 2005, 2: 1351.
[20]ZHANG Y. Dual Neural Networks: Design, Analysis, and Application to Redundant Robotics[C]// In: Kang, G.B.(ed.) Progress in Neurocomputing Research, New York, 2007:41.
(編辑:温泽宇)
