电静液执行器双向远程控制的位置跟踪精度研究
2020-05-21宋锦春
蔡 衍, 周 捷, 陈 杰, 宋锦春
(东北大学 机械工程与自动化学院, 辽宁 沈阳 110819)
通过双向控制,操作者可以在远处操纵主动机械手,同步指令信号经通信环节传输至从动机械手,从而控制其与环境进行交互,并通过反馈回来的接触力信息获得临场感[1].目前,双向远程控制策略已成功应用于深海或深空等未知环境探索、远程医疗手术、核燃料操作以及工程机械等领域[2-3].
电静液执行器(EHA)采用闭式回路静液传动的容积控制方式,直接调节泵的转速或排量控制进入系统的流量,从而实现变功率传输.在操作者、主从机械手及环境动特性存在不确定性的情况下,实现鲁棒位置跟踪非常具有挑战性[4].因而,引入鲁棒控制方法以提高从动机械手的位置跟踪精度是非常必要的.
本文将一种基于定量反馈理论的鲁棒位置控制器应用于存在不确定性的EHA远程机械手上,以提高其位置跟踪性能,并通过力反馈(FR)、位置误差反馈(PE)、共性柔顺控制(SCC)及无源力反馈(FRP)四种常用的双向控制方案进行实验验证.这四种方案代表了广泛的双向远程控制应用需求,且已在文献[5-6]中证实适用于EHA.其位置跟踪精度和透明度的提升将进一步说明双向远程控制EHA的可行性和应用前景[7].
1 基于EHA的远程机械手建模
图1为远程控制的基本组成以及信息交互过程,该系统主要包含主从机械手以及相匹配的通讯环节,其中位移信息从主动端流向从动端,而从动端将力信号反馈给操作者,实现两端的双向信息交互.
图1 远程控制系统的框架及信息流图
Fig.1Framework and information flow of
teleoperation systems
人的手臂采用无源形式进行描述,等效为可变刚度的弹簧,其结合主动端触觉设备,在一维空间可表述为[8]
(1)
其中:Fh为操作者施加至系统的力;Fm为主动机械手(即触觉设备)反馈至操作者的力;xm为主动机械手位移.考虑操作者手臂和触觉设备为主动端,用Mm表示主动端的综合质量,Bm表示主动端的综合黏性系数,Kh为操作者手臂的等效弹簧刚度.根据文献[9],在四种远程控制策略中,均取Fh=1 N,且操作者感知到的反馈力Fm<1 N.
EHA作为从动机械手,由伺服电动机、定量泵、双杆液压缸及相关补油回路组成.EHA原理图如图2所示.
伺服电机控制电压与输出转速之间的关系可简化为
(2)
其中:u为控制电压,所选伺服电机的最大允许输入电压为±10 V;ω为电机实时转速,其最大输出转速为3 000 r/min;Km为伺服电机的动态增益;Tm为其时间常数.
定量泵的输出流量为
(3)
其中:qL为负载流量,即泵输入到执行器的流量;pL为负载压力,该系统中等于液压泵两腔的压力降;D为泵的排量;Clp为液压泵的泄漏系数.
对称执行器的流量连续性方程以及力平衡方程为
(4)
(5)
式中:A为液压缸活塞的有效作用面积;xs为从动机械手(即电静液执行器)的位移;Clc为液压缸的泄漏系数;Vt为可压缩油液的总体积;βe为有效体积弹性模量.考虑液压缸的运动部件及运动负载为等效负载,用Ms表示从动端等效负载的综合质量,Bs表示等效负载的综合黏性系数,Ke为环境的等效弹簧刚度.
参考文献[10],鉴于待研究系统自身内泄漏程度有限,且存在补油回路,为避免引起不必要的极限环现象,忽略泄漏项.因此,整理式(2)~式(5),EHA从电机输入电压到执行器输出位移的传递函数为
(6)
参考文献[5-6],将环境简化为刚度30和170 kN/m的弹性负载环境.被控系统的参数取值参见表1.
2 QFT控制器设计及分析
2.1 定量反馈理论
定量反馈理论(QFT)是一种能够针对存在不确定性及未知干扰的系统,通过建立低频宽控制器以达到预期鲁棒性能的频域设计方法[11].设计控制器时,可首先通过频率响应测试获得系统样本,基于设定的闭环性能指标,定量计算开环边界,再采用回路整形设计方法,调整开环频率响应曲线使其在各频率点处均满足期望边界.
2.2 控制器设计
QFT位置控制器G和前置滤波器F设计的成功与否,将直接影响系统的跟踪性能与稳定性.给定期望的性能指标:
采用表1参数,将数学模型及其不确定性导入QFT Matlab工具箱,得图3所示的系统样本.
回路整形设计结果如图4所示.为了避免过设计,设计控制器时,应尽量保证开环频率响应曲线在低频区域接近边界,使其位于开式边界之上,闭式边界之内;并在达到转折频率后急速衰减,从而抑制高频噪声对系统的干扰,避免激发未建模的动特性.根据此原则,采用试错法,通过增加系统增益或引入零点和极点等环节,调整开环频率响应曲线,保证其满足边界条件.由此,获得控制器G:
(7)
在控制器G的校正作用下,有效地避免了过设计,不仅使开环频率响应曲线在各频率点处均位于设计边界内,也保证了一定程度的噪声抑制.前置过滤器的设计也使得闭环频率响应曲线处于期望包络线内,从而满足跟踪性能指标,设计效果如图5所示.
(8)
3 实验结果
结合设计的控制器,将四种双向控制方案应用于基于电静液执行器的远程机械手操作平台,运行实验验证,实验设备的组成如图6所示.
在该实验台中,采用PHANTOM Omni六自由度触觉设备作为主动端机械手,半实物仿真系统可视为通信环节,EHA作为从动机械手与环境交互.
远程机械手与环境的接触实验将依据不同刚度分为两组进行:一组是由30 kN/m弹簧模拟的软环境;另一组则是由170 kN/m弹簧模拟的硬环境.性能评价主要参考以下三个指标:①从动端对主动端的位置跟踪;②操作者对从动端与环境接触力的感知情况;③远程控制系统中操作者的感知刚度与环境刚度的匹配程度,即透明度.
3.1 与软环境(30 kN/m)的接触
如图7所示,选择一种多步操作指令信号作为输入,FR和PE方案显示出良好的位置跟踪性能.因为从动端柔性项的存在,导致SCC方案存在一定的稳态误差.FRP方案虽然能够保证系统的稳定性,但由于无源项的反馈,使得从动端位移呈衰减趋势.图8为软环境接触时的力感知情况,其中FR和SCC方案真实地反映了从动端的交互情况,PE方案仅反映实际位移和指令信号的偏差.
根据图9可以得出,FR与SCC方案能够在低频段使操作者获得与实际刚度近似匹配的感知刚度,二者差别并不明显;PE方案由于没有从动端力反馈,缺乏对环境的刚度感知;而FRP方案仅能够在极低的频率段反映实际刚度,随着频率增加,操作者的感知刚度随着位移衰减逐渐降低.
3.2 与硬环境(170 kN/m)的接触
图10为执行器与硬环境接触时的位置跟踪,相比于软环境下的接触情况,系统在SCC方案下的柔顺性以及在FRP方案下的无源效应均更加明显.
由图11和图12可见,SCC方案控制下的执行器,由于柔顺性的存在能够在一定程度上避免与环境的刚性碰撞,但是也牺牲了操作者对环境刚度感知的真实性.FRP方案接触硬环境时,感知刚度随频率逐渐降低的趋势更加明显.从表2中数据可以明显看出,各方案的感知刚度和实际刚度间的透明度从FR,SCC,FRP到PE依次递减.
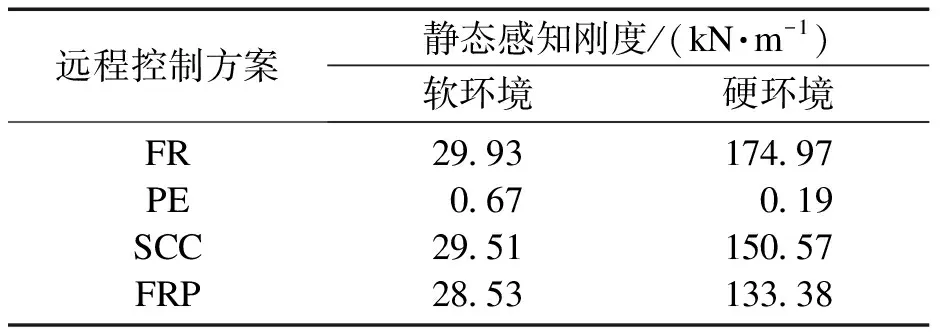
表2 各方案中的静态感知刚度
以上结果表明,QFT鲁棒位置控制器均适用于以上四种远程控制方案.为了进一步验证QFT鲁棒控制器对位置跟踪精度的提升效果,应尽量避免从动端柔顺性和无源效应的干扰,因此仅考虑FR和PE方案.图13展示了FR和PE方案,在从动端引入QFT位置控制器前、后,分别与软、硬环境接触时的位置误差.由表3数据易见,引入QFT位置控制器后,稳态位置跟踪精度大大提升,因而感知刚度更为准确.
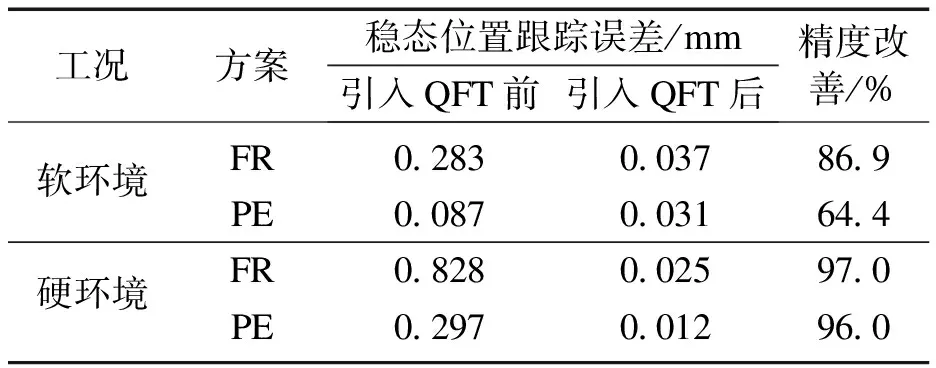
表3 引入QFT控制器前后系统的稳态误差
4 结 论
1) 本文介绍了EHA的工作原理并构建了远程控制系统的框架,对每个环节进行了建模分析.
2) 针对系统中的参数不确定性,设计了基于定量反馈理论的控制器,并应用于四种双向控制方案,大大改善了位置跟踪精度和感知刚度的准确性,满足性能预期.
3) 基于双向远程控制的EHA,分别进行了与软环境和硬环境的接触实验,比较了四种双向控制方案,分别对其位置跟踪精度、力跟踪以及透明度表现进行了分析.结果表明,FR方案位置跟踪、力跟踪和透明度性能俱佳,最适于EHA的远程控制.
