风机主控半实物仿真测试平台设计
2020-05-16刘翠翠鲁效平关中杰
刘翠翠, 鲁效平, 关中杰
(山东中车风电有限公司风电装备研究所,济南250022)
0 引 言
近年来由于风机现场事故频发和维护成本增加的问题[1],使得如何在实验室内利用半实物仿真技术对故障多发部件的功能和可靠性进行测试成为当前业内亟待解决的问题之一。半实物仿真技术,又称硬件在环(Hardware In the Loop,HIL)仿真技术,是指在仿真试验回路中接入部分实物的实时仿真技术[2]。HIL仿真测试是风机主控系统开发中非常重要的一环,广泛应用在控制策略开发、算法测试、硬件测试、现场优化维护及机组认证中[3]。丹麦、德国和荷兰等国家的风电行业都有较为成熟的风力发电机组仿真平台,可用来进行元件的开发测试。近年来,国内的风电半物理仿真实验技术也有了很大发展,北京交通大学开发了一套以dSPACE为核心的风电机组控制算法半实物仿真平台,但dSPACE成本昂贵,难以大规模应用[4-5]。东南大学曾基于xPC技术开发了风力发电机半实物测试平台,但xPC的扩展性有限,难以匹配真实风机上的大量接口[6]。
在充分考虑成本、扩展性的基础上,本文开发了一套以风机主控为核心的半实物仿真测试平台,其中,风机主控可实现风机变桨、偏航等控制;半实物仿真技术可完成风电整机和关键部件的仿真测试,风电机组模型采用Matlab模块化编写,能够灵活修改和扩展,且信号调理能对信号进行分类、简化和调整。
1 仿真总体设计
半实物风电仿真测试平台能对整机和关键部件进行仿真测试,并可模拟风机在不同环境下的运行情况[7]。利用其运行特性,不仅可实现对控制系统的全面测试,还能缩短开发周期、降低开发成本[8]。半实物仿真测试平台的总体结构如图1所示。

图1 仿真测试平台总体结构图
仿真测试平台主要包括5部分:上位机、目标实时平台、控制器、I/O接口和人机界面。
上位机:构建与生成仿真模型,采用PC V260SR;
目标实时平台(下位机):实时运行风机仿真模型,采用某品牌C5120型工控机;
主控制器:实现对风机变桨、齿轮箱、液压站、偏航等控制,选用某品牌CPU-CX2020型控制器;
I/O接口:用于信号收发与转换,采用相应型号的接口;
人机界面:采用Matlab GUI编写。
该平台技术原理主要包括3部分:风机的Matlab建模、HIL平台构建、测试软件GUI。上位机中采用Matlab/Simulink、Visual Studio建立风机仿真模型以及GUI操作界面,利用模型实时代码转换技术将仿真模型转化为代码,并将代码下载到目标实时平台,同时载入测试工况,完成对控制器的测试。GUI可监控测试过程及后处理操作,并利用高速I/O接口保证测试的实时性。
1.1 风机模型开发
半实物仿真测试平台中上位机利用Matalb建立风机的仿真模型,并利用Matlab/Simulation和Twincat3的模型实时代码转换技术,将模型自动转换为在HIL系统上运行的实时代码,以保证系统测试的实时性,测试步长<10 ms。图2为整机模型构成。

图2 整机模型构成
本文采用柔性多体动力学方法对机组进行建模,该方法不仅便于数值计算,还特别适用于风机系统的半实物仿真测试[9]。风机结构动力学状态空间方程的建立主要有3步。
(1)柔性多体动力学建模。如图3所示,将风机分为13个杆单元(可增减),其中每个杆单元之间的结构柔性通过采用带刚度和阻尼的万向连接表示。
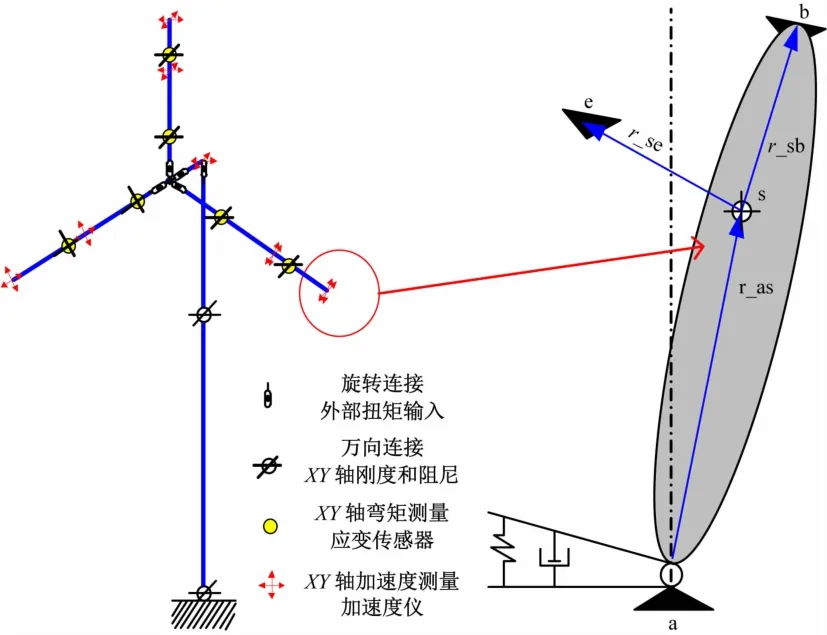
图3 风机多体动力学建模杆单元示意图
由图3右图的杆单位为例,由质心动量定理、动量矩定理可得杆单元的质心动力学公式:
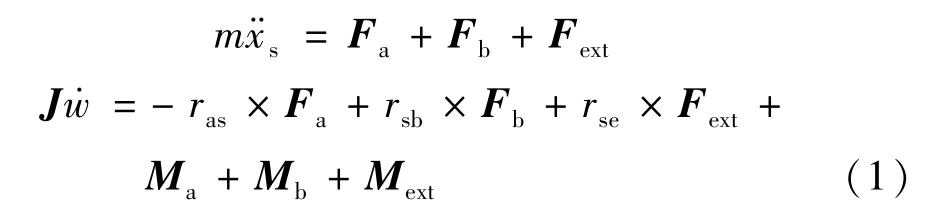
式中:m为杆单元质量;xs为质心处位移量;Fa为杆单元a点的作用力;ras为a点与杆单元质心的距离;Ma为作用在a点上的力矩;Fb为杆单元b点的作用力;rsb为b点与杆单元质心的距离;Mb为作用在b点上的力矩;Fext为施加在杆单元上的外部力;rse为杆单元质心到Fext作用点的距离;Mext为外部输入力矩;J为杆单元相对质心的转动惯量值;w为杆单元旋转角速度。
根据多体动力学原理,杆单元质心s处的加速度可由a点加速度及杆单元的旋转角速度w计算得到,即:

又a点力矩可由该处的刚度c及阻尼铰d(其中φ为杆单元铰接角度)计算得到:
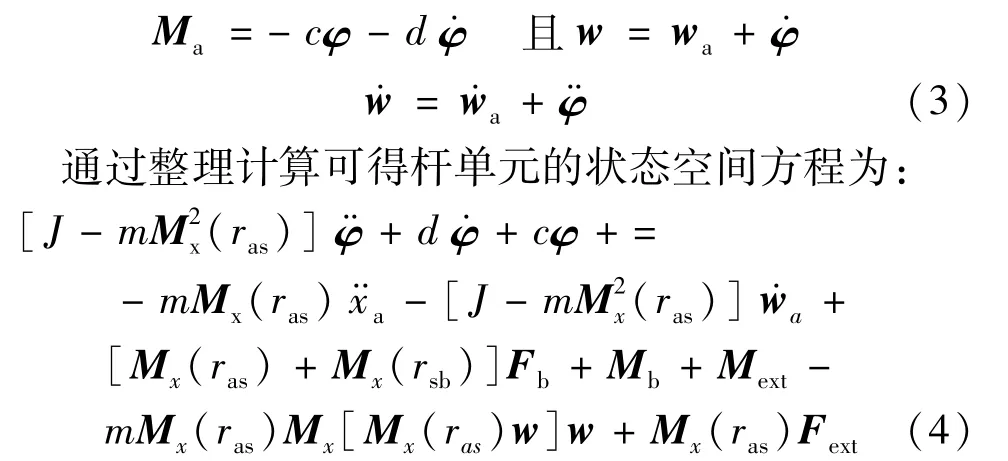
(2)进行雅克比线性化处理。此步骤是为得到便于控制的风电机组多体动力学模型。通过在固定步长点处进行一阶泰勒展开,以提高非线性模型泰勒展开的精度[10]。
假定工作点a处有恒定的力和力矩作用在杆单元上,给角速度、角加速度及铰接点处位移一个偏量,在此进行相应的线性化,即:

令Gw(r,w0)=grad(Mx(Mx(r)w)w)可知杆单元的状态空间方程:

(3)进行多叶片坐标系的变换。为消除对风轮转角的依赖,模型中引入多叶片坐标系的变换,以提高模型计算的实时性[11-12]。
输入、输出变量在物理坐标系(123)与多叶片坐标系(osc)之间的变换式:

式中:T为坐标变换矩阵;st为状态变量之间的变换;in为输入变量,out为输出变量。得到系统的状态空间方程[13-14]:

1.2 控制模型建立
风机主控系统以PLC为核心,当机组运行状态与设定状态不一致时,经过PLC的计算与处理,通过控制器发出控制指令,将系统调整至设定的运行状态,完成各种控制功能。以某1.5 MW变速变桨风机为例(额定风速9.5 m/s,风轮转速9.8 ~15.5 r/min),机组的核心控制策略是转矩控制和变桨控制,小于额定风速时,机组通过转矩控制实现最大能量捕获,在额定风速以上,通过变桨控制实现功率的恒定输出。
如图4所示,风机根据风况可分为4个运行阶段。
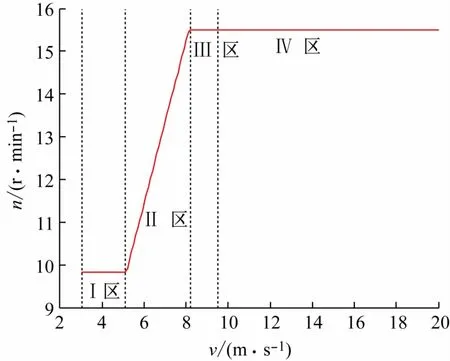
图4 风速-转速曲线
阶段1恒转速阶段,风速较小时,通过风机控制器调整发电机转矩值,发电机转速稳定在转速下限值;
阶段2Cp恒定区,该区域内机组受给定的功率-转速曲线控制,一般使机组运行在最佳叶尖速比值,以便最大程度地捕获风能。
阶段3恒转速阶段,该区域随着风速增大,发电机转速保持恒定,功率持续上升。
阶段4当风速高于额定风速时,机组通过调节桨距角使机组输出功率值稳定在额定值附近。
2 系统测试
半实物仿真平台搭建完成后的实物图如图5所示。图中①为上位机;②为目标实时平台(仿真机);③为控制器原型;④为信号调理电路;⑤为按钮指示灯面板。
2.1 测试流程
以某1.5 MW机组为例,测试流程主要包括以下4步。
(1)模型初始化。定义风机各元件的参数,如叶片翼型、塔身结构参数等。
(2)测试工况设定。选择风机测试工况或定制测试工况。该工况在Matlab环境下设计,可转化为TwinCAT3环境中输入,继而进行实时测试。
(3)测试流程监控。显示多个风机测试工况在队列中的运行状态、风机三维动画显示以及测试信号的实时显示。
(4)后处理及性能评估。信号求平均、求最大最小值、功率谱分析、雨流计数、生成测试报告等。
测试界面如图6所示。
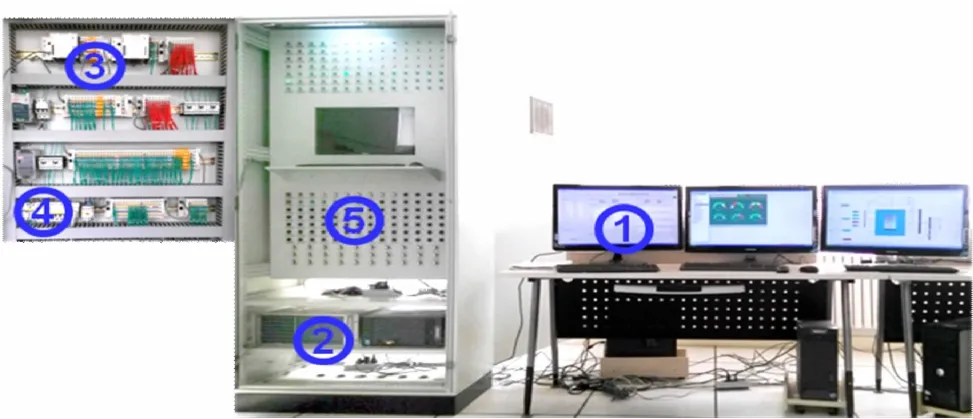
图5 半实物仿真平台实物图

图6 测试界面图
2.2 测试结果
半实物仿真测试平台能够模拟IEC61400-1中规定的所有运行情况,并根据测试需求定制工况;也可模拟机组遇到的大部分故障工况。下面将对1.5MW机组的几种典型工况进行模拟分析。
(1)阵风工况。利用仿真测试平台模拟机组变桨系统在极限阵风工况下的响应过程。在仿真实验不同工作点设定极端阵风,通过监测风轮转速、功率信号、叶片载荷及塔顶加速度信号,评估风机变桨控制对阵风的响应。
测试结果如图7所示。图中红色线为设定上、下限值。结果显示该工况没有触发停机,也没有超过叶片的设计极限载荷,塔顶加速度也在设定范围内,说明变桨系统可适应风场的极端工作环境。
(2)故障工况。仿真中设置单叶片失控故障(叶片1失控,向0°快速变桨),通过监控相关变量,评估控制器在该故障工况下的响应。测试结果如图8所示。

图7 阵风工况测试结果

图8 故障工况测试结果
测试结果显示,叶片1失控,快速向0°变桨,触发风机故障停机,其后另外两叶片向90°收桨,机组风轮并无超速,塔架和叶片的载荷也在设计载荷内,最大塔顶加速度在设定范围内变化。仿真平台模拟了风机在单叶片失控的情况下触发停机的整个过程,并验证了在叶片失控故障下风机控制器的有效性。
3 结 语
本文中设计的风机主控半实物仿真测试平台,可实现对风电整机及关键部件的仿真测试。该风机模型以多体动力学为主,包含了大量来自现场测试的经验参数和修正系数,在提高模型精度的同时采用Matlab/Simulation和Twincat3的模型实时代码转换技术保证了模型的实时性。另外平台基于Matlab开发,更适合控制系统设计,且模块化编程,易于后期扩展[15]。
通过对典型工况进行的仿真测试,验证了风机主控半实物仿真测试平台的有效性,同时该平台具有实时性好、易扩展的特点,可大大缩短开发周期,减少研发成本,提高风机质量和可靠性。
